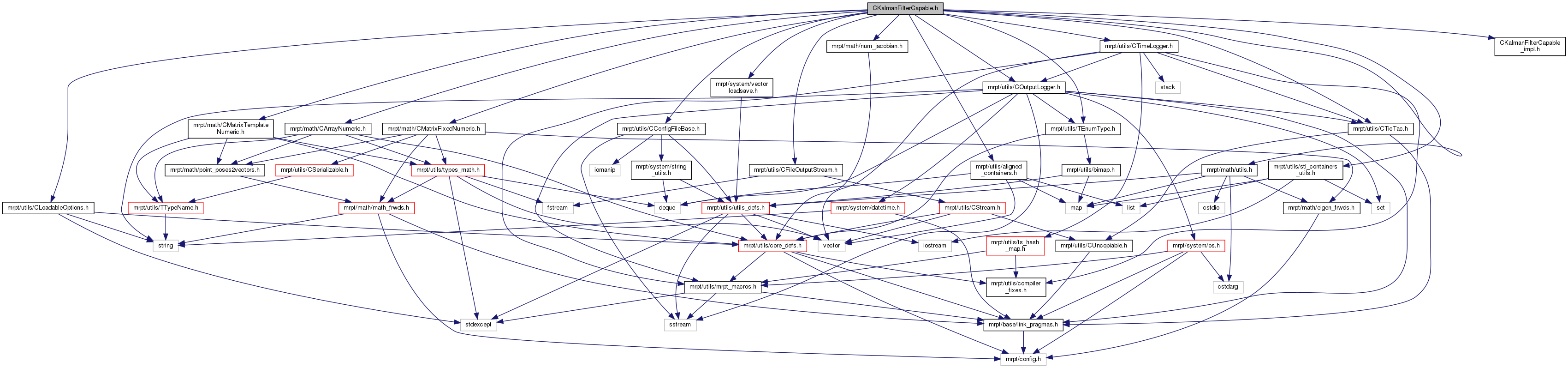
#include <mrpt/math/CMatrixFixedNumeric.h>#include <mrpt/math/CMatrixTemplateNumeric.h>#include <mrpt/math/CArrayNumeric.h>#include <mrpt/math/num_jacobian.h>#include <mrpt/math/utils.h>#include <mrpt/utils/CConfigFileBase.h>#include <mrpt/utils/CTimeLogger.h>#include <mrpt/utils/aligned_containers.h>#include <mrpt/utils/CLoadableOptions.h>#include <mrpt/utils/stl_containers_utils.h>#include <mrpt/utils/COutputLogger.h>#include <mrpt/utils/CTicTac.h>#include <mrpt/utils/CFileOutputStream.h>#include <mrpt/utils/TEnumType.h>#include <mrpt/system/vector_loadsave.h>#include "CKalmanFilterCapable_impl.h"
Include dependency graph for CKalmanFilterCapable.h:
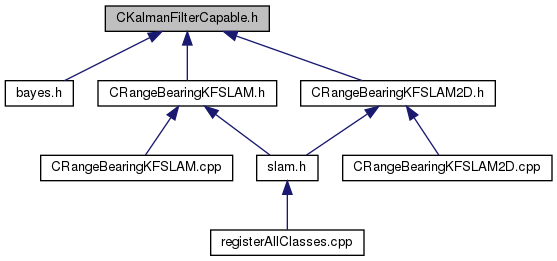
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | mrpt::bayes::TKF_options |
| Generic options for the Kalman Filter algorithm in itself. More... | |
| class | mrpt::bayes::CKalmanFilterCapable< VEH_SIZE, OBS_SIZE, FEAT_SIZE, ACT_SIZE, KFTYPE > |
| Virtual base for Kalman Filter (EKF,IEKF,UKF) implementations. More... | |
| struct | mrpt::utils::TEnumTypeFiller< bayes::TKFMethod > |
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::bayes | |
| The namespace for Bayesian filtering algorithm: different particle filters and Kalman filter algorithms. | |
| mrpt::bayes::detail | |
| Auxiliary functions, for internal usage of MRPT classes. | |
| mrpt::utils | |
| Classes for serialization, sockets, ini-file manipulation, streams, list of properties-values, timewatch, extensions to STL. | |
Enumerations | |
| enum | mrpt::bayes::TKFMethod { mrpt::bayes::kfEKFNaive = 0 , mrpt::bayes::kfEKFAlaDavison , mrpt::bayes::kfIKFFull , mrpt::bayes::kfIKF } |
| The Kalman Filter algorithm to employ in bayes::CKalmanFilterCapable For further details on each algorithm see the tutorial: http://www.mrpt.org/Kalman_Filters. More... | |
Functions | |
| template<size_t VEH_SIZE, size_t OBS_SIZE, size_t FEAT_SIZE, size_t ACT_SIZE, typename KFTYPE > | |
| size_t | mrpt::bayes::detail::getNumberOfLandmarksInMap (const CKalmanFilterCapable< VEH_SIZE, OBS_SIZE, FEAT_SIZE, ACT_SIZE, KFTYPE > &obj) |
| template<size_t VEH_SIZE, size_t OBS_SIZE, size_t ACT_SIZE, typename KFTYPE > | |
| size_t | mrpt::bayes::detail::getNumberOfLandmarksInMap (const CKalmanFilterCapable< VEH_SIZE, OBS_SIZE, 0, ACT_SIZE, KFTYPE > &obj) |
| template<size_t VEH_SIZE, size_t OBS_SIZE, size_t FEAT_SIZE, size_t ACT_SIZE, typename KFTYPE > | |
| bool | mrpt::bayes::detail::isMapEmpty (const CKalmanFilterCapable< VEH_SIZE, OBS_SIZE, FEAT_SIZE, ACT_SIZE, KFTYPE > &obj) |
| template<size_t VEH_SIZE, size_t OBS_SIZE, size_t ACT_SIZE, typename KFTYPE > | |
| bool | mrpt::bayes::detail::isMapEmpty (const CKalmanFilterCapable< VEH_SIZE, OBS_SIZE, 0, ACT_SIZE, KFTYPE > &obj) |
| template<size_t VEH_SIZE, size_t OBS_SIZE, size_t FEAT_SIZE, size_t ACT_SIZE, typename KFTYPE > | |
| void | mrpt::bayes::detail::addNewLandmarks (CKalmanFilterCapable< VEH_SIZE, OBS_SIZE, FEAT_SIZE, ACT_SIZE, KFTYPE > &obj, const typename CKalmanFilterCapable< VEH_SIZE, OBS_SIZE, FEAT_SIZE, ACT_SIZE, KFTYPE >::vector_KFArray_OBS &Z, const vector_int &data_association, const typename CKalmanFilterCapable< VEH_SIZE, OBS_SIZE, FEAT_SIZE, ACT_SIZE, KFTYPE >::KFMatrix_OxO &R) |
| template<size_t VEH_SIZE, size_t OBS_SIZE, size_t ACT_SIZE, typename KFTYPE > | |
| void | mrpt::bayes::detail::addNewLandmarks (CKalmanFilterCapable< VEH_SIZE, OBS_SIZE, 0, ACT_SIZE, KFTYPE > &obj, const typename CKalmanFilterCapable< VEH_SIZE, OBS_SIZE, 0, ACT_SIZE, KFTYPE >::vector_KFArray_OBS &Z, const vector_int &data_association, const typename CKalmanFilterCapable< VEH_SIZE, OBS_SIZE, 0, ACT_SIZE, KFTYPE >::KFMatrix_OxO &R) |