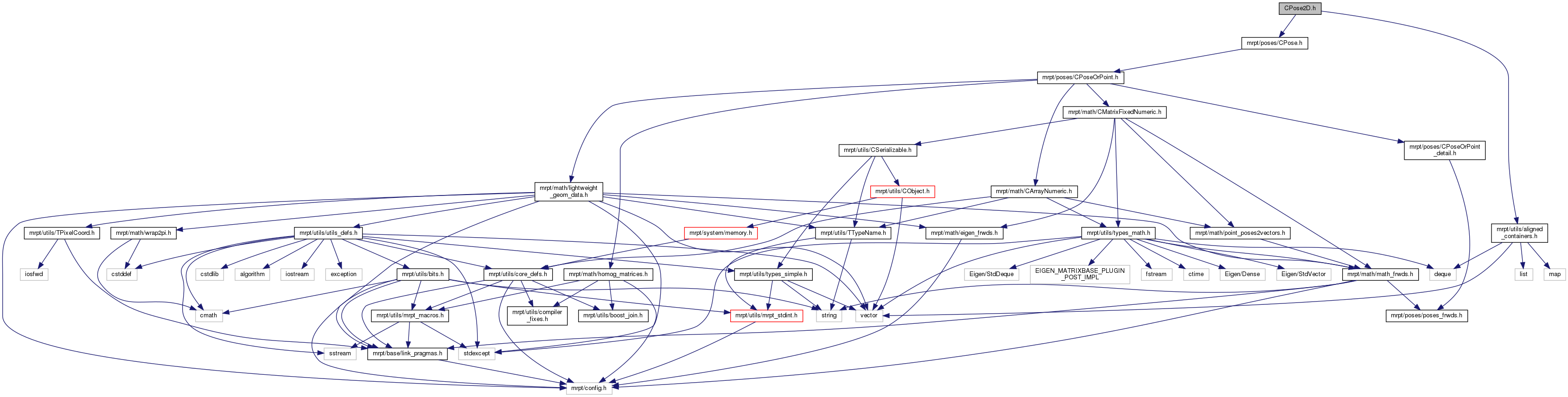
Include dependency graph for CPose2D.h:
Go to the source code of this file.
Classes | |
| class | mrpt::poses::CPose2D |
| A class used to store a 2D pose, including the 2D coordinate point and a heading (phi) angle. More... | |
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::poses | |
| Classes for 2D/3D geometry representation, both of single values and probability density distributions (PDFs) in many forms. | |
Typedefs | |
| typedef mrpt::aligned_containers< CPose2D >::vector_t | mrpt::poses::StdVector_CPose2D |
| Eigen aligment-compatible container. More... | |
| typedef mrpt::aligned_containers< CPose2D >::deque_t | mrpt::poses::StdDeque_CPose2D |
| Eigen aligment-compatible container. More... | |
Functions | |
| ::mrpt::utils::CStream & | mrpt::poses::operator>> (mrpt::utils::CStream &in, CPose2DPtr &pObj) |
| std::ostream BASE_IMPEXP & | mrpt::poses::operator<< (std::ostream &o, const CPose2D &p) |
| Textual output stream function. More... | |
| CPose2D BASE_IMPEXP | mrpt::poses::operator- (const CPose2D &p) |
| Unary - operator: return the inverse pose "-p" (Note that is NOT the same than a pose with negative x y phi) More... | |
| mrpt::math::TPoint2D BASE_IMPEXP | mrpt::poses::operator+ (const CPose2D &pose, const mrpt::math::TPoint2D &pnt) |
| Compose a 2D point from a new coordinate base given by a 2D pose. More... | |
| bool BASE_IMPEXP | mrpt::poses::operator== (const CPose2D &p1, const CPose2D &p2) |
| bool BASE_IMPEXP | mrpt::poses::operator!= (const CPose2D &p1, const CPose2D &p2) |