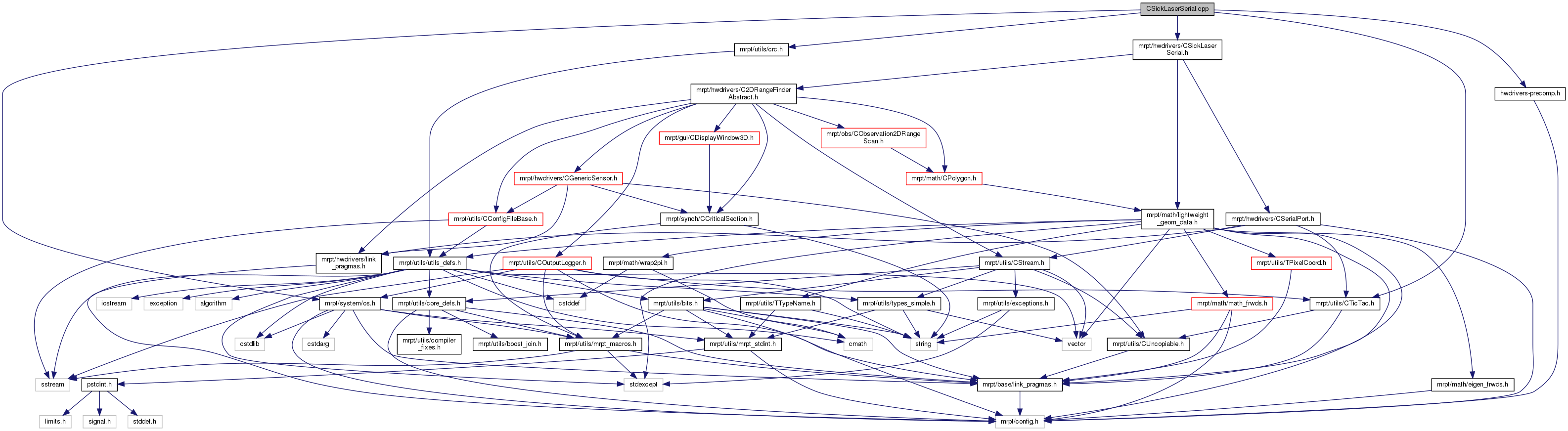
#include "hwdrivers-precomp.h"#include <mrpt/utils/crc.h>#include <mrpt/utils/CTicTac.h>#include <mrpt/system/os.h>#include <mrpt/hwdrivers/CSickLaserSerial.h>
Include dependency graph for CSickLaserSerial.cpp:
Go to the source code of this file.
Macros | |
| #define | RET_ERROR(msg) { cout << "[" << __CURRENT_FUNCTION_NAME__ <<"] " << msg << endl; return false; } |
Macro Definition Documentation
◆ RET_ERROR
| #define RET_ERROR | ( | msg | ) | { cout << "[" << __CURRENT_FUNCTION_NAME__ <<"] " << msg << endl; return false; } |
Definition at line 23 of file CSickLaserSerial.cpp.