Detailed Description
template<class T>
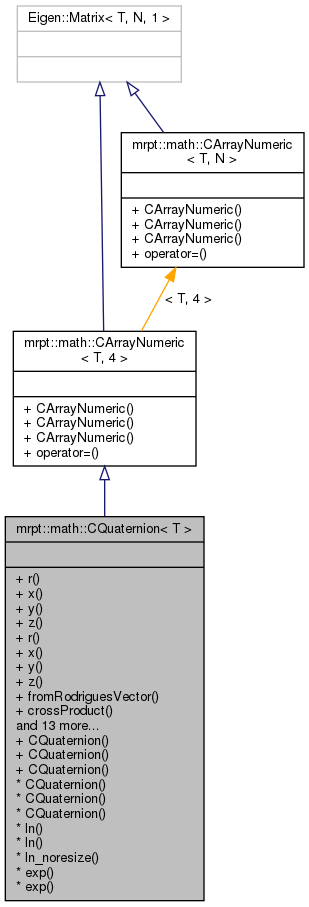
class mrpt::math::CQuaternion< T >
A quaternion, which can represent a 3D rotation as pair  , with a real part "r" and a 3D vector
, with a real part "r" and a 3D vector  , or alternatively, q = r + ix + jy + kz.
, or alternatively, q = r + ix + jy + kz.
The elements of the quaternion can be accessed by either:
Users will usually employ the typedef "CQuaternionDouble" instead of this template.
For more information about quaternions, see:
- http://people.csail.mit.edu/bkph/articles/Quaternions.pdf
- http://en.wikipedia.org/wiki/Quaternions_and_spatial_rotation
- See also
- mrpt::poses::CPose3D
Definition at line 43 of file CQuaternion.h.
#include <mrpt/math/CQuaternion.h>
Public Types | |
| typedef T | value_type |
Public Member Functions | |
| CQuaternion (TConstructorFlags_Quaternions) | |
| Can be used with UNINITIALIZED_QUATERNION as argument, does not initialize the 4 elements of the quaternion (use this constructor when speed is critical). More... | |
| CQuaternion () | |
| Default constructor: construct a (1, (0,0,0) ) quaternion representing no rotation. More... | |
| CQuaternion (const T r, const T x, const T y, const T z) | |
| Construct a quaternion from its parameters 'r', 'x', 'y', 'z', with q = r + ix + jy + kz. More... | |
| T | r () const |
| Return r coordinate of the quaternion. More... | |
| T | x () const |
| Return x coordinate of the quaternion. More... | |
| T | y () const |
| Return y coordinate of the quaternion. More... | |
| T | z () const |
| Return z coordinate of the quaternion. More... | |
| void | r (const T r) |
| Set r coordinate of the quaternion. More... | |
| void | x (const T x) |
| Set x coordinate of the quaternion. More... | |
| void | y (const T y) |
| Set y coordinate of the quaternion. More... | |
| void | z (const T z) |
| Set z coordinate of the quaternion. More... | |
| template<class ARRAYLIKE3 > | |
| void | fromRodriguesVector (const ARRAYLIKE3 &v) |
Set this quaternion to the rotation described by a 3D (Rodrigues) rotation vector  : If : If  , then the quaternion is , then the quaternion is ![$ \mathbf{q} = [1 ~ 0 ~ 0 ~ 0]^\top $](form_9.png) , otherwise: More... , otherwise: More... | |
| void | crossProduct (const CQuaternion &q1, const CQuaternion &q2) |
| Calculate the "cross" product (or "composed rotation") of two quaternion: this = q1 x q2 After the operation, "this" will represent the composed rotations of q1 and q2 (q2 applied "after" q1). More... | |
| void | rotatePoint (const double lx, const double ly, const double lz, double &gx, double &gy, double &gz) const |
| Rotate a 3D point (lx,ly,lz) -> (gx,gy,gz) as described by this quaternion. More... | |
| void | inverseRotatePoint (const double lx, const double ly, const double lz, double &gx, double &gy, double &gz) const |
| Rotate a 3D point (lx,ly,lz) -> (gx,gy,gz) as described by the inverse (conjugate) of this quaternion. More... | |
| double | normSqr () const |
| Return the squared norm of the quaternion. More... | |
| void | normalize () |
| Normalize this quaternion, so its norm becomes the unitity. More... | |
| template<class MATRIXLIKE > | |
| void | normalizationJacobian (MATRIXLIKE &J) const |
| Calculate the 4x4 Jacobian of the normalization operation of this quaternion. More... | |
| template<class MATRIXLIKE > | |
| void | rotationJacobian (MATRIXLIKE &J) const |
Compute the Jacobian of the rotation composition operation  , that is the 4x4 matrix , that is the 4x4 matrix  . More... . More... | |
| template<class MATRIXLIKE > | |
| void | rotationMatrix (MATRIXLIKE &M) const |
| Calculate the 3x3 rotation matrix associated to this quaternion: More... | |
| template<class MATRIXLIKE > | |
| void | rotationMatrixNoResize (MATRIXLIKE &M) const |
| Fill out the top-left 3x3 block of the given matrix with the rotation matrix associated to this quaternion (does not resize the matrix, for that, see rotationMatrix). More... | |
| void | conj (CQuaternion &q_out) const |
| Return the conjugate quaternion More... | |
| CQuaternion | conj () const |
| Return the conjugate quaternion More... | |
| void | rpy (T &roll, T &pitch, T &yaw) const |
| Return the yaw, pitch & roll angles associated to quaternion. More... | |
| template<class MATRIXLIKE > | |
| void | rpy_and_jacobian (T &roll, T &pitch, T &yaw, MATRIXLIKE *out_dr_dq=NULL, bool resize_out_dr_dq_to3x4=true) const |
| Return the yaw, pitch & roll angles associated to quaternion, and (optionally) the 3x4 Jacobian of the transformation. More... | |
| CQuaternion | operator* (const T &factor) |
Private Types | |
| typedef CArrayNumeric< T, 4 > | Base |
Lie Algebra methods | |
| template<class ARRAYLIKE3 > | |
| void | ln (ARRAYLIKE3 &out_ln) const |
| Logarithm of the 3x3 matrix defined by this pose, generating the corresponding vector in the SO(3) Lie Algebra, which coincides with the so-called "rotation vector" (I don't have space here for the proof ;-). More... | |
| template<class ARRAYLIKE3 > | |
| ARRAYLIKE3 | ln () const |
| overload that returns by value More... | |
| template<class ARRAYLIKE3 > | |
| void | ln_noresize (ARRAYLIKE3 &out_ln) const |
| Like ln() but does not try to resize the output vector. More... | |
| template<class ARRAYLIKE3 > | |
| static CQuaternion< T > | exp (const ARRAYLIKE3 &v) |
| Exponential map from the SO(3) Lie Algebra to unit quaternions. More... | |
| template<class ARRAYLIKE3 > | |
| static void | exp (const ARRAYLIKE3 &v, CQuaternion< T > &out_quat) |
| This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts. More... | |
Member Typedef Documentation
◆ Base
|
private |
Definition at line 45 of file CQuaternion.h.
◆ value_type
|
inherited |
Definition at line 28 of file CArrayNumeric.h.
Constructor & Destructor Documentation
◆ CQuaternion() [1/3]
|
inline |
Can be used with UNINITIALIZED_QUATERNION as argument, does not initialize the 4 elements of the quaternion (use this constructor when speed is critical).
Definition at line 51 of file CQuaternion.h.
◆ CQuaternion() [2/3]
|
inline |
Default constructor: construct a (1, (0,0,0) ) quaternion representing no rotation.
Definition at line 54 of file CQuaternion.h.
◆ CQuaternion() [3/3]
|
inline |
Construct a quaternion from its parameters 'r', 'x', 'y', 'z', with q = r + ix + jy + kz.
Definition at line 63 of file CQuaternion.h.
References ASSERTMSG_, mrpt::format(), mrpt::math::CQuaternion< T >::normSqr(), mrpt::math::CQuaternion< T >::r(), mrpt::math::CQuaternion< T >::x(), mrpt::math::CQuaternion< T >::y(), and mrpt::math::CQuaternion< T >::z().
Member Function Documentation
◆ conj() [1/2]
|
inline |
Return the conjugate quaternion
Definition at line 307 of file CQuaternion.h.
◆ conj() [2/2]
|
inline |
Return the conjugate quaternion
Definition at line 298 of file CQuaternion.h.
References mrpt::math::CQuaternion< T >::r(), mrpt::math::CQuaternion< T >::x(), mrpt::math::CQuaternion< T >::y(), and mrpt::math::CQuaternion< T >::z().
Referenced by mrpt::poses::CPose3DQuatPDFGaussian::inverse(), and mrpt::poses::CPose3DQuatPDFGaussianInf::inverse().
◆ crossProduct()
|
inline |
Calculate the "cross" product (or "composed rotation") of two quaternion: this = q1 x q2 After the operation, "this" will represent the composed rotations of q1 and q2 (q2 applied "after" q1).
Definition at line 180 of file CQuaternion.h.
References mrpt::math::CQuaternion< T >::normalize(), mrpt::math::CQuaternion< T >::r(), mrpt::math::CQuaternion< T >::x(), mrpt::math::CQuaternion< T >::y(), and mrpt::math::CQuaternion< T >::z().
Referenced by mrpt::poses::CPose3DQuat::composeFrom(), mrpt::poses::CPose3DQuat::inverseComposeFrom(), mrpt::poses::CPose3DPDF::jacobiansPoseComposition(), and TEST_F().
◆ exp() [1/2]
|
inlinestatic |
Exponential map from the SO(3) Lie Algebra to unit quaternions.
- See also
- ln, mrpt::poses::SE_traits
Definition at line 161 of file CQuaternion.h.
References mrpt::math::UNINITIALIZED_QUATERNION.
◆ exp() [2/2]
|
inlinestatic |
This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts.
Definition at line 169 of file CQuaternion.h.
References mrpt::math::CQuaternion< T >::fromRodriguesVector().
◆ fromRodriguesVector()
|
inline |
Set this quaternion to the rotation described by a 3D (Rodrigues) rotation vector : If , then the quaternion is , otherwise:
![\[ \mathbf{q} = \left[ \begin{array}{c} \cos(\frac{\theta}{2}) \\ v_x \frac{\sin(\frac{\theta}{2})}{\theta} \\ v_y \frac{\sin(\frac{\theta}{2})}{\theta} \\ v_z \frac{\sin(\frac{\theta}{2})}{\theta} \end{array} \right] \]](form_10.png)
where  .
.
- See also
- "Representing Attitude: Euler Angles, Unit Quaternions, and Rotation Vectors (2006)", James Diebel.
Definition at line 97 of file CQuaternion.h.
References THROW_EXCEPTION.
Referenced by mrpt::math::CQuaternion< T >::exp().
◆ inverseRotatePoint()
|
inline |
Rotate a 3D point (lx,ly,lz) -> (gx,gy,gz) as described by the inverse (conjugate) of this quaternion.
Definition at line 204 of file CQuaternion.h.
References mrpt::math::CQuaternion< T >::r(), mrpt::math::CQuaternion< T >::x(), mrpt::math::CQuaternion< T >::y(), and mrpt::math::CQuaternion< T >::z().
Referenced by mrpt::poses::CPose3DQuat::inverseComposePoint().
◆ ln() [1/2]
|
inline |
overload that returns by value
Definition at line 140 of file CQuaternion.h.
◆ ln() [2/2]
|
inline |
Logarithm of the 3x3 matrix defined by this pose, generating the corresponding vector in the SO(3) Lie Algebra, which coincides with the so-called "rotation vector" (I don't have space here for the proof ;-).
- Parameters
-
[out] out_ln The target vector, which can be: std::vector<>, or mrpt::math::CVectorDouble or any row or column Eigen::Matrix<>.
- See also
- exp, mrpt::poses::SE_traits
Definition at line 133 of file CQuaternion.h.
References mrpt::math::CQuaternion< T >::ln_noresize().
Referenced by QuaternionTests::test_ExpAndLnMatches(), and QuaternionTests::test_lnAndExpMatches().
◆ ln_noresize()
|
inline |
Like ln() but does not try to resize the output vector.
Definition at line 148 of file CQuaternion.h.
References mrpt::math::CQuaternion< T >::r(), mrpt::math::square(), mrpt::math::CQuaternion< T >::x(), mrpt::math::CQuaternion< T >::y(), and mrpt::math::CQuaternion< T >::z().
Referenced by mrpt::math::CQuaternion< T >::ln().
◆ normalizationJacobian()
|
inline |
Calculate the 4x4 Jacobian of the normalization operation of this quaternion.
The output matrix can be a dynamic or fixed size (4x4) matrix.
Definition at line 232 of file CQuaternion.h.
References mrpt::math::CQuaternion< T >::normSqr(), mrpt::math::CQuaternion< T >::r(), mrpt::math::CQuaternion< T >::x(), mrpt::math::CQuaternion< T >::y(), and mrpt::math::CQuaternion< T >::z().
Referenced by mrpt::poses::CPose3DQuat::composePoint(), mrpt::poses::CPose3DPDFGaussian::copyFrom(), mrpt::poses::CPose3DQuat::inverseComposePoint(), mrpt::poses::CPose3DPDF::jacobiansPoseComposition(), mrpt::poses::CPose3DQuatPDF::jacobiansPoseComposition(), and Pose3DQuatTests::test_normalizeJacob().
◆ normalize()
|
inline |
Normalize this quaternion, so its norm becomes the unitity.
Definition at line 221 of file CQuaternion.h.
References mrpt::math::CQuaternion< T >::normSqr().
Referenced by mrpt::poses::CPose3DQuat::CPose3DQuat(), and mrpt::math::CQuaternion< T >::crossProduct().
◆ normSqr()
|
inline |
Return the squared norm of the quaternion.
Definition at line 214 of file CQuaternion.h.
References mrpt::math::CQuaternion< T >::r(), mrpt::math::square(), mrpt::math::CQuaternion< T >::x(), mrpt::math::CQuaternion< T >::y(), and mrpt::math::CQuaternion< T >::z().
Referenced by mrpt::math::CQuaternion< T >::CQuaternion(), mrpt::math::CQuaternion< T >::normalizationJacobian(), and mrpt::math::CQuaternion< T >::normalize().
◆ operator*()
|
inline |
Definition at line 399 of file CQuaternion.h.
◆ r() [1/2]
|
inline |
Return r coordinate of the quaternion.
Definition at line 76 of file CQuaternion.h.
Referenced by mrpt::poses::CPose3DQuat::composePoint(), mrpt::math::CQuaternion< T >::conj(), mrpt::math::CQuaternion< T >::CQuaternion(), mrpt::math::CQuaternion< T >::crossProduct(), mrpt::hwdrivers::CImageGrabber_FlyCapture2::getObservation(), mrpt::poses::CPose3DQuat::inverseComposeFrom(), mrpt::poses::CPose3DQuat::inverseComposePoint(), mrpt::math::CQuaternion< T >::inverseRotatePoint(), mrpt::poses::CPose3DQuatPDF::jacobiansPoseComposition(), mrpt::math::CQuaternion< T >::ln_noresize(), mrpt::math::CQuaternion< T >::normalizationJacobian(), mrpt::math::CQuaternion< T >::normSqr(), mrpt::topography::path_from_rtk_gps(), mrpt::graphslam::CGraphSlamEngine< GRAPH_T >::readGTFileRGBD_TUM(), mrpt::math::CQuaternion< T >::rotatePoint(), mrpt::math::CQuaternion< T >::rotationJacobian(), mrpt::math::CQuaternion< T >::rotationMatrixNoResize(), mrpt::math::CQuaternion< T >::rpy_and_jacobian(), and Pose3DQuatTests::test_invComposePointJacob().
◆ r() [2/2]
|
inline |
Set r coordinate of the quaternion.
Definition at line 80 of file CQuaternion.h.
References mrpt::math::CQuaternion< T >::r().
Referenced by mrpt::math::CQuaternion< T >::r().
◆ rotatePoint()
|
inline |
Rotate a 3D point (lx,ly,lz) -> (gx,gy,gz) as described by this quaternion.
Definition at line 193 of file CQuaternion.h.
References mrpt::math::CQuaternion< T >::r(), mrpt::math::CQuaternion< T >::x(), mrpt::math::CQuaternion< T >::y(), and mrpt::math::CQuaternion< T >::z().
Referenced by mrpt::poses::CPose3DQuat::composeFrom(), mrpt::poses::CPose3DQuat::composePoint(), and mrpt::poses::CPose3DQuat::inverseComposeFrom().
◆ rotationJacobian()
|
inline |
Compute the Jacobian of the rotation composition operation , that is the 4x4 matrix .
The output matrix can be a dynamic or fixed size (4x4) matrix.
Definition at line 262 of file CQuaternion.h.
References mrpt::math::CQuaternion< T >::r(), mrpt::math::CQuaternion< T >::x(), mrpt::math::CQuaternion< T >::y(), and mrpt::math::CQuaternion< T >::z().
◆ rotationMatrix()
|
inline |
Calculate the 3x3 rotation matrix associated to this quaternion:
![\[ \mathbf{R} = \left( \begin{array}{ccc} q_r^2+q_x^2-q_y^2-q_z^2 & 2(q_x q_y - q_r q_z) & 2(q_z q_x+q_r q_y) \\ 2(q_x q_y+q_r q_z) & q_r^2-q_x^2+q_y^2-q_z^2 & 2(q_y q_z-q_r q_x) \\ 2(q_z q_x-q_r q_y) & 2(q_y q_z+q_r q_x) & q_r^2- q_x^2 - q_y^2 + q_z^2 \end{array} \right)\]](form_14.png)
Definition at line 281 of file CQuaternion.h.
References mrpt::math::CQuaternion< T >::rotationMatrixNoResize().
◆ rotationMatrixNoResize()
|
inline |
Fill out the top-left 3x3 block of the given matrix with the rotation matrix associated to this quaternion (does not resize the matrix, for that, see rotationMatrix).
Definition at line 289 of file CQuaternion.h.
References mrpt::math::CQuaternion< T >::r(), mrpt::math::CQuaternion< T >::x(), mrpt::math::CQuaternion< T >::y(), and mrpt::math::CQuaternion< T >::z().
Referenced by mrpt::poses::CPose3DQuat::getHomogeneousMatrix(), and mrpt::math::CQuaternion< T >::rotationMatrix().
◆ rpy()
|
inline |
Return the yaw, pitch & roll angles associated to quaternion.
- See also
- For the equations, see The MRPT Book, or see http://www.euclideanspace.com/maths/geometry/rotations/conversions/quaternionToEuler/Quaternions.pdf
- rpy_and_jacobian
Definition at line 318 of file CQuaternion.h.
References mrpt::obs::gnss::pitch, mrpt::obs::gnss::roll, and mrpt::math::CQuaternion< T >::rpy_and_jacobian().
Referenced by mrpt::graphslam::CGraphSlamEngine< GRAPH_T >::readGTFileRGBD_TUM().
◆ rpy_and_jacobian()
|
inline |
Return the yaw, pitch & roll angles associated to quaternion, and (optionally) the 3x4 Jacobian of the transformation.
Note that both the angles and the Jacobian have one set of normal equations, plus other special formulas for the degenerated cases of |pitch|=90 degrees.
- See also
- For the equations, see The MRPT Book, or http://www.euclideanspace.com/maths/geometry/rotations/conversions/quaternionToEuler/Quaternions.pdf
- rpy
Definition at line 329 of file CQuaternion.h.
References M_PI, mrpt::obs::gnss::pitch, mrpt::math::CQuaternion< T >::r(), mrpt::obs::gnss::roll, mrpt::math::square(), mrpt::math::CQuaternion< T >::x(), mrpt::math::CQuaternion< T >::y(), and mrpt::math::CQuaternion< T >::z().
Referenced by mrpt::poses::CPose3DPDFGaussian::copyFrom(), mrpt::poses::CPose3DPDF::jacobiansPoseComposition(), and mrpt::math::CQuaternion< T >::rpy().
◆ x() [1/2]
|
inline |
Return x coordinate of the quaternion.
Definition at line 77 of file CQuaternion.h.
Referenced by mrpt::poses::CPose3DQuat::composePoint(), mrpt::math::CQuaternion< T >::conj(), mrpt::math::CQuaternion< T >::CQuaternion(), mrpt::math::CQuaternion< T >::crossProduct(), mrpt::hwdrivers::CImageGrabber_FlyCapture2::getObservation(), mrpt::poses::CPose3DQuat::inverseComposeFrom(), mrpt::poses::CPose3DQuat::inverseComposePoint(), mrpt::math::CQuaternion< T >::inverseRotatePoint(), mrpt::poses::CPose3DQuatPDF::jacobiansPoseComposition(), mrpt::math::CQuaternion< T >::ln_noresize(), mrpt::math::CQuaternion< T >::normalizationJacobian(), mrpt::math::CQuaternion< T >::normSqr(), mrpt::topography::path_from_rtk_gps(), mrpt::graphslam::CGraphSlamEngine< GRAPH_T >::readGTFileRGBD_TUM(), mrpt::math::CQuaternion< T >::rotatePoint(), mrpt::math::CQuaternion< T >::rotationJacobian(), mrpt::math::CQuaternion< T >::rotationMatrixNoResize(), mrpt::math::CQuaternion< T >::rpy_and_jacobian(), and Pose3DQuatTests::test_invComposePointJacob().
◆ x() [2/2]
|
inline |
Set x coordinate of the quaternion.
Definition at line 81 of file CQuaternion.h.
References mrpt::math::CQuaternion< T >::x().
Referenced by mrpt::math::CQuaternion< T >::x().
◆ y() [1/2]
|
inline |
Return y coordinate of the quaternion.
Definition at line 78 of file CQuaternion.h.
Referenced by mrpt::poses::CPose3DQuat::composePoint(), mrpt::math::CQuaternion< T >::conj(), mrpt::math::CQuaternion< T >::CQuaternion(), mrpt::math::CQuaternion< T >::crossProduct(), mrpt::hwdrivers::CImageGrabber_FlyCapture2::getObservation(), mrpt::poses::CPose3DQuat::inverseComposeFrom(), mrpt::poses::CPose3DQuat::inverseComposePoint(), mrpt::math::CQuaternion< T >::inverseRotatePoint(), mrpt::poses::CPose3DQuatPDF::jacobiansPoseComposition(), mrpt::math::CQuaternion< T >::ln_noresize(), mrpt::math::CQuaternion< T >::normalizationJacobian(), mrpt::math::CQuaternion< T >::normSqr(), mrpt::topography::path_from_rtk_gps(), mrpt::graphslam::CGraphSlamEngine< GRAPH_T >::readGTFileRGBD_TUM(), mrpt::math::CQuaternion< T >::rotatePoint(), mrpt::math::CQuaternion< T >::rotationJacobian(), mrpt::math::CQuaternion< T >::rotationMatrixNoResize(), mrpt::math::CQuaternion< T >::rpy_and_jacobian(), and Pose3DQuatTests::test_invComposePointJacob().
◆ y() [2/2]
|
inline |
Set y coordinate of the quaternion.
Definition at line 82 of file CQuaternion.h.
References mrpt::math::CQuaternion< T >::y().
Referenced by mrpt::math::CQuaternion< T >::y().
◆ z() [1/2]
|
inline |
Return z coordinate of the quaternion.
Definition at line 79 of file CQuaternion.h.
Referenced by mrpt::poses::CPose3DQuat::composePoint(), mrpt::math::CQuaternion< T >::conj(), mrpt::math::CQuaternion< T >::CQuaternion(), mrpt::math::CQuaternion< T >::crossProduct(), mrpt::hwdrivers::CImageGrabber_FlyCapture2::getObservation(), mrpt::poses::CPose3DQuat::inverseComposeFrom(), mrpt::poses::CPose3DQuat::inverseComposePoint(), mrpt::math::CQuaternion< T >::inverseRotatePoint(), mrpt::poses::CPose3DQuatPDF::jacobiansPoseComposition(), mrpt::math::CQuaternion< T >::ln_noresize(), mrpt::math::CQuaternion< T >::normalizationJacobian(), mrpt::math::CQuaternion< T >::normSqr(), mrpt::topography::path_from_rtk_gps(), mrpt::graphslam::CGraphSlamEngine< GRAPH_T >::readGTFileRGBD_TUM(), mrpt::math::CQuaternion< T >::rotatePoint(), mrpt::math::CQuaternion< T >::rotationJacobian(), mrpt::math::CQuaternion< T >::rotationMatrixNoResize(), mrpt::math::CQuaternion< T >::rpy_and_jacobian(), and Pose3DQuatTests::test_invComposePointJacob().
◆ z() [2/2]
|
inline |
Set z coordinate of the quaternion.
Definition at line 83 of file CQuaternion.h.
References mrpt::math::CQuaternion< T >::z().
Referenced by mrpt::math::CQuaternion< T >::z().