Detailed Description
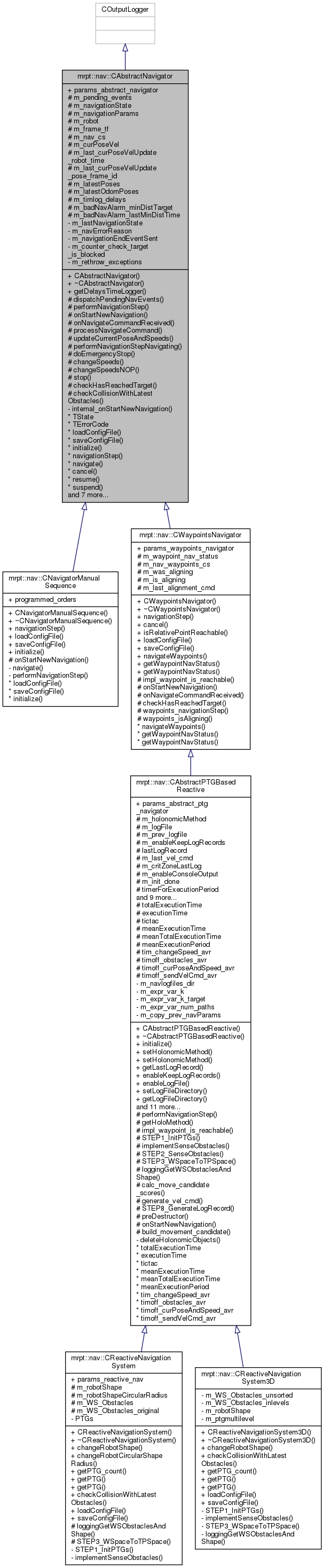
This is the base class for any reactive/planned navigation system.
See derived classes.
How to use:
- A class derived from
CRobot2NavInterfacewith callbacks must be defined by the user and provided to the constructor. navigationStep()must be called periodically in order to effectively run the navigation. This method will internally call the callbacks to gather sensor data and robot positioning data.
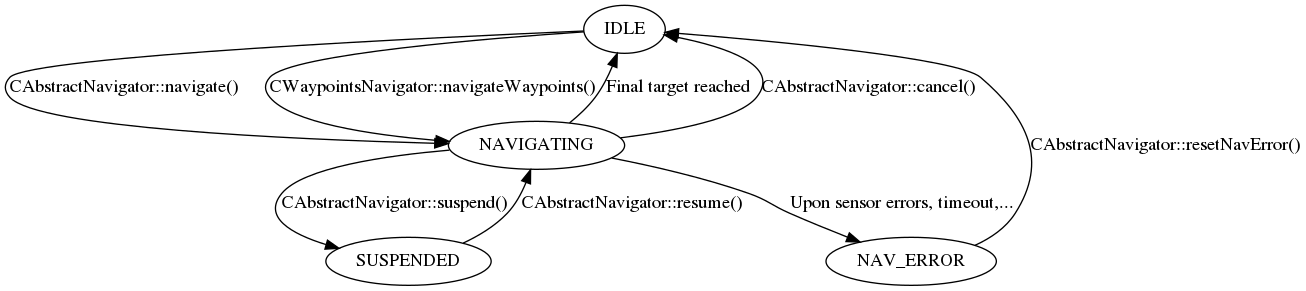
It implements the following state machine (see CAbstractNavigator::getCurrentState() ), taking into account the extensions described in CWaypointsNavigator
- See also
- CWaypointsNavigator, CReactiveNavigationSystem, CRobot2NavInterface, all children classes
Definition at line 52 of file CAbstractNavigator.h.
#include <mrpt/nav/reactive/CAbstractNavigator.h>
Classes | |
| struct | TAbstractNavigatorParams |
| struct | TargetInfo |
| Individual target info in CAbstractNavigator::TNavigationParamsBase and derived classes. More... | |
| struct | TErrorReason |
| struct | TNavigationParams |
| The struct for configuring navigation requests. More... | |
| struct | TNavigationParamsBase |
| Base for all high-level navigation commands. More... | |
| struct | TPendingEvent |
| struct | TRobotPoseVel |
Public Member Functions | |
| CAbstractNavigator (CRobot2NavInterface &robot_interface_impl) | |
| ctor More... | |
| virtual | ~CAbstractNavigator () |
| dtor More... | |
| const mrpt::utils::CTimeLogger & | getDelaysTimeLogger () const |
| Gives access to a const-ref to the internal time logger used to estimate delays. More... | |
Public Attributes | |
| TAbstractNavigatorParams | params_abstract_navigator |
Protected Member Functions | |
| void | dispatchPendingNavEvents () |
| virtual void | performNavigationStep ()=0 |
| To be implemented in derived classes. More... | |
| virtual void | onStartNewNavigation ()=0 |
| Called whenever a new navigation has been started. More... | |
| virtual void | onNavigateCommandReceived () |
| Called after each call to CAbstractNavigator::navigate() More... | |
| virtual void | processNavigateCommand (const TNavigationParams *params) |
| Does the job of navigate(), except the call to onNavigateCommandReceived() More... | |
| virtual void | updateCurrentPoseAndSpeeds () |
| Call to the robot getCurrentPoseAndSpeeds() and updates members m_curPoseVel accordingly. More... | |
| virtual void | performNavigationStepNavigating (bool call_virtual_nav_method=true) |
| Factorization of the part inside navigationStep(), for the case of state being NAVIGATING. More... | |
| virtual void | doEmergencyStop (const std::string &msg) |
| Stops the robot and set navigation state to error. More... | |
| virtual bool | changeSpeeds (const mrpt::kinematics::CVehicleVelCmd &vel_cmd) |
| Default: forward call to m_robot.changeSpeed(). Can be overriden. More... | |
| virtual bool | changeSpeedsNOP () |
| Default: forward call to m_robot.changeSpeedsNOP(). Can be overriden. More... | |
| virtual bool | stop (bool isEmergencyStop) |
| Default: forward call to m_robot.stop(). Can be overriden. More... | |
| virtual bool | checkHasReachedTarget (const double targetDist) const |
| Default implementation: check if target_dist is below the accepted distance. More... | |
| virtual bool | checkCollisionWithLatestObstacles (const mrpt::math::TPose2D &relative_robot_pose) const |
| Checks whether the robot shape, when placed at the given pose (relative to the current pose), is colliding with any of the latest known obstacles. More... | |
Private Member Functions | |
| void | internal_onStartNewNavigation () |
| Called before starting a new navigation. More... | |
Private Attributes | |
| TState | m_lastNavigationState |
| Last internal state of navigator: More... | |
| TErrorReason | m_navErrorReason |
| bool | m_navigationEndEventSent |
| Will be false until the navigation end is sent, and it is reset with each new command. More... | |
| int | m_counter_check_target_is_blocked |
| bool | m_rethrow_exceptions |
Navigation control API | |
| enum | TState { IDLE =0 , NAVIGATING , SUSPENDED , NAV_ERROR } |
| The different states for the navigation system. More... | |
| enum | TErrorCode { ERR_NONE =0 , ERR_EMERGENCY_STOP , ERR_CANNOT_REACH_TARGET , ERR_OTHER } |
| Explains the reason for the navigation error. More... | |
| virtual void | loadConfigFile (const mrpt::utils::CConfigFileBase &c) |
| Loads all params from a file. More... | |
| virtual void | saveConfigFile (mrpt::utils::CConfigFileBase &c) const |
| Saves all current options to a config file. More... | |
| virtual void | initialize ()=0 |
| Must be called before any other navigation command. More... | |
| virtual void | navigationStep () |
| This method must be called periodically in order to effectively run the navigation. More... | |
| virtual void | navigate (const TNavigationParams *params) |
| Navigation request to a single target location. More... | |
| virtual void | cancel () |
| Cancel current navegation. More... | |
| virtual void | resume () |
| Continues with suspended navigation. More... | |
| virtual void | suspend () |
| Suspend current navegation. More... | |
| virtual void | resetNavError () |
Resets a NAV_ERROR state back to IDLE More... | |
| TState | getCurrentState () const |
| Returns the current navigator state. More... | |
| const TErrorReason & | getErrorReason () const |
| In case of state=NAV_ERROR, this returns the reason for the error. More... | |
| void | setFrameTF (mrpt::poses::FrameTransformer< 2 > *frame_tf) |
Sets a user-provided frame transformer object; used only if providing targets in a frame ID different than the one in which robot odometry is given (both IDs default to "map"). More... | |
| const mrpt::poses::FrameTransformer< 2 > * | getFrameTF () const |
| Get the current frame tf object (defaults to nullptr) More... | |
| void | enableRethrowNavExceptions (const bool enable) |
| By default, error exceptions on navigationStep() will dump an error message to the output logger interface. More... | |
| bool | isRethrowNavExceptionsEnabled () const |
Member Enumeration Documentation
◆ TErrorCode
Explains the reason for the navigation error.
| Enumerator | |
|---|---|
| ERR_NONE | |
| ERR_EMERGENCY_STOP | |
| ERR_CANNOT_REACH_TARGET | |
| ERR_OTHER | |
Definition at line 131 of file CAbstractNavigator.h.
◆ TState
The different states for the navigation system.
| Enumerator | |
|---|---|
| IDLE | |
| NAVIGATING | |
| SUSPENDED | |
| NAV_ERROR | In this case, use getErrorReason() |
Definition at line 120 of file CAbstractNavigator.h.
Constructor & Destructor Documentation
◆ CAbstractNavigator()
| CAbstractNavigator::CAbstractNavigator | ( | CRobot2NavInterface & | robot_interface_impl | ) |
ctor
Definition at line 86 of file CAbstractNavigator.cpp.
References mrpt::poses::imLinear2Neig, m_latestOdomPoses, m_latestPoses, and mrpt::poses::CPoseInterpolatorBase< DIM >::setInterpolationMethod().
◆ ~CAbstractNavigator()
|
virtual |
dtor
Definition at line 108 of file CAbstractNavigator.cpp.
References mrpt::utils::delete_safe(), and m_navigationParams.
Member Function Documentation
◆ cancel()
|
virtual |
Cancel current navegation.
Reimplemented in mrpt::nav::CWaypointsNavigator.
Definition at line 116 of file CAbstractNavigator.cpp.
References IDLE, m_nav_cs, m_navigationState, MRPT_LOG_DEBUG, and stop().
Referenced by mrpt::nav::CWaypointsNavigator::cancel().
◆ changeSpeeds()
|
protectedvirtual |
Default: forward call to m_robot.changeSpeed(). Can be overriden.
Definition at line 414 of file CAbstractNavigator.cpp.
References mrpt::nav::CRobot2NavInterface::changeSpeeds(), and m_robot.
Referenced by mrpt::nav::CNavigatorManualSequence::navigationStep(), mrpt::nav::CAbstractPTGBasedReactive::performNavigationStep(), and mrpt::nav::CWaypointsNavigator::waypoints_navigationStep().
◆ changeSpeedsNOP()
|
protectedvirtual |
Default: forward call to m_robot.changeSpeedsNOP(). Can be overriden.
Definition at line 418 of file CAbstractNavigator.cpp.
References mrpt::nav::CRobot2NavInterface::changeSpeedsNOP(), and m_robot.
Referenced by mrpt::nav::CAbstractPTGBasedReactive::performNavigationStep().
◆ checkCollisionWithLatestObstacles()
|
protectedvirtual |
Checks whether the robot shape, when placed at the given pose (relative to the current pose), is colliding with any of the latest known obstacles.
Default implementation: always returns false.
Reimplemented in mrpt::nav::CReactiveNavigationSystem3D, and mrpt::nav::CReactiveNavigationSystem.
Definition at line 626 of file CAbstractNavigator.cpp.
Referenced by performNavigationStepNavigating().
◆ checkHasReachedTarget()
|
protectedvirtual |
Default implementation: check if target_dist is below the accepted distance.
If true is returned here, the end-of-navigation event will be sent out (only for non-intermediary targets).
Reimplemented in mrpt::nav::CWaypointsNavigator.
Definition at line 454 of file CAbstractNavigator.cpp.
Referenced by performNavigationStepNavigating().
◆ dispatchPendingNavEvents()
|
protected |
Definition at line 249 of file CAbstractNavigator.cpp.
References ERR_CANNOT_REACH_TARGET, mrpt::nav::CAbstractNavigator::TErrorReason::error_code, mrpt::nav::CAbstractNavigator::TErrorReason::error_msg, mrpt::nav::CAbstractNavigator::TPendingEvent::event_noargs, m_navErrorReason, m_navigationState, m_pending_events, m_robot, MRPT_LOG_WARN, NAV_ERROR, mrpt::nav::CRobot2NavInterface::sendCannotGetCloserToBlockedTargetEvent(), mrpt::nav::CRobot2NavInterface::sendNewWaypointTargetEvent(), mrpt::nav::CRobot2NavInterface::sendWaypointReachedEvent(), and mrpt::nav::CRobot2NavInterface::sendWaySeemsBlockedEvent().
Referenced by navigationStep(), and mrpt::nav::CWaypointsNavigator::navigationStep().
◆ doEmergencyStop()
|
protectedvirtual |
Stops the robot and set navigation state to error.
Definition at line 284 of file CAbstractNavigator.cpp.
References ERR_EMERGENCY_STOP, ERR_NONE, mrpt::nav::CAbstractNavigator::TErrorReason::error_code, mrpt::nav::CAbstractNavigator::TErrorReason::error_msg, m_navErrorReason, m_navigationState, MRPT_LOG_ERROR, NAV_ERROR, and stop().
Referenced by mrpt::nav::CAbstractPTGBasedReactive::performNavigationStep().
◆ enableRethrowNavExceptions()
|
inline |
By default, error exceptions on navigationStep() will dump an error message to the output logger interface.
If rethrow is enabled (default=false), the error message will be reported as well, but exceptions will be re-thrown.
Definition at line 167 of file CAbstractNavigator.h.
◆ getCurrentState()
|
inline |
Returns the current navigator state.
Definition at line 128 of file CAbstractNavigator.h.
◆ getDelaysTimeLogger()
|
inline |
Gives access to a const-ref to the internal time logger used to estimate delays.
- See also
- getTimeLogger() in derived classes
Definition at line 190 of file CAbstractNavigator.h.
◆ getErrorReason()
|
inline |
In case of state=NAV_ERROR, this returns the reason for the error.
Error state is reseted everytime a new navigation starts with a call to navigate(), or when resetNavError() is called.
Definition at line 150 of file CAbstractNavigator.h.
◆ getFrameTF()
|
inline |
Get the current frame tf object (defaults to nullptr)
- See also
- setFrameTF
Definition at line 161 of file CAbstractNavigator.h.
◆ initialize()
|
pure virtual |
Must be called before any other navigation command.
Implemented in mrpt::nav::CNavigatorManualSequence, and mrpt::nav::CAbstractPTGBasedReactive.
◆ internal_onStartNewNavigation()
|
private |
Called before starting a new navigation.
Internally, it calls to child-implemented onStartNewNavigation()
Definition at line 459 of file CAbstractNavigator.cpp.
References mrpt::poses::CPoseInterpolatorBase< DIM >::clear(), m_latestOdomPoses, m_latestPoses, m_robot, onStartNewNavigation(), and mrpt::nav::CRobot2NavInterface::startWatchdog().
Referenced by performNavigationStepNavigating().
◆ isRethrowNavExceptionsEnabled()
|
inline |
Definition at line 170 of file CAbstractNavigator.h.
◆ loadConfigFile()
|
virtual |
Loads all params from a file.
To be called before initialize(). Each derived class MUST load its own parameters, and then call ITS PARENT'S overriden method to ensure all params are loaded.
Reimplemented in mrpt::nav::CWaypointsNavigator, mrpt::nav::CReactiveNavigationSystem3D, mrpt::nav::CReactiveNavigationSystem, mrpt::nav::CNavigatorManualSequence, and mrpt::nav::CAbstractPTGBasedReactive.
Definition at line 172 of file CAbstractNavigator.cpp.
References mrpt::utils::CConfigFileMemory::getContent(), mrpt::nav::CAbstractNavigator::TAbstractNavigatorParams::loadFromConfigFile(), MRPT_END, MRPT_LOG_INFO, MRPT_START, params_abstract_navigator, and saveConfigFile().
Referenced by mrpt::nav::CWaypointsNavigator::loadConfigFile().
◆ navigate()
|
virtual |
Navigation request to a single target location.
It starts a new navigation.
- Parameters
-
[in] params Pointer to structure with navigation info (its contents will be copied, so the original can be freely destroyed upon return if it was dynamically allocated.)
- Note
- A pointer is used so the passed object can be polymorphic with derived types.
Reimplemented in mrpt::nav::CNavigatorManualSequence.
Definition at line 341 of file CAbstractNavigator.cpp.
References MRPT_END, MRPT_START, onNavigateCommandReceived(), and processNavigateCommand().
◆ navigationStep()
|
virtual |
This method must be called periodically in order to effectively run the navigation.
Reimplemented in mrpt::nav::CWaypointsNavigator, and mrpt::nav::CNavigatorManualSequence.
Definition at line 197 of file CAbstractNavigator.cpp.
References dispatchPendingNavEvents(), mrpt::nav::CAbstractNavigator::TPendingEvent::event_noargs, IDLE, m_lastNavigationState, m_nav_cs, m_navigationState, m_pending_events, m_robot, m_timlog_delays, MRPT_LOG_ERROR, MRPT_LOG_INFO, NAV_ERROR, NAVIGATING, performNavigationStepNavigating(), mrpt::nav::CRobot2NavInterface::sendNavigationEndDueToErrorEvent(), stop(), mrpt::nav::CRobot2NavInterface::stopWatchdog(), and SUSPENDED.
Referenced by mrpt::nav::CWaypointsNavigator::navigationStep().
◆ onNavigateCommandReceived()
|
protectedvirtual |
Called after each call to CAbstractNavigator::navigate()
Reimplemented in mrpt::nav::CWaypointsNavigator.
Definition at line 301 of file CAbstractNavigator.cpp.
References mrpt::utils::delete_safe(), m_nav_cs, m_navigationEndEventSent, and m_navigationParams.
Referenced by navigate(), and mrpt::nav::CWaypointsNavigator::onNavigateCommandReceived().
◆ onStartNewNavigation()
|
protectedpure virtual |
Called whenever a new navigation has been started.
Can be used to reset state variables, etc.
Implemented in mrpt::nav::CWaypointsNavigator, mrpt::nav::CNavigatorManualSequence, and mrpt::nav::CAbstractPTGBasedReactive.
Referenced by internal_onStartNewNavigation().
◆ performNavigationStep()
|
protectedpure virtual |
To be implemented in derived classes.
Implemented in mrpt::nav::CNavigatorManualSequence, and mrpt::nav::CAbstractPTGBasedReactive.
Referenced by performNavigationStepNavigating().
◆ performNavigationStepNavigating()
|
protectedvirtual |
Factorization of the part inside navigationStep(), for the case of state being NAVIGATING.
Performs house-hold tasks like raising events in case of starting/ending navigation, timeout reaching destination, etc. call_virtual_nav_method can be set to false to avoid calling the virtual method performNavigationStep()
Definition at line 467 of file CAbstractNavigator.cpp.
References mrpt::nav::CAbstractNavigator::TAbstractNavigatorParams::alarm_seems_not_approaching_target_timeout, ASSERT_, checkCollisionWithLatestObstacles(), checkHasReachedTarget(), mrpt::nav::CAbstractNavigator::TAbstractNavigatorParams::dist_check_target_is_blocked, mrpt::nav::CAbstractNavigator::TAbstractNavigatorParams::dist_to_target_for_sending_event, mrpt::math::TSegment2D::distance(), mrpt::poses::CPoseInterpolatorBase< DIM >::empty(), ERR_CANNOT_REACH_TARGET, ERR_NONE, ERR_OTHER, mrpt::nav::CAbstractNavigator::TErrorReason::error_code, mrpt::nav::CAbstractNavigator::TErrorReason::error_msg, mrpt::nav::CAbstractNavigator::TPendingEvent::event_cannot_get_closer_target, mrpt::nav::CAbstractNavigator::TPendingEvent::event_noargs, mrpt::format(), mrpt::nav::CAbstractNavigator::TNavigationParams::getAsText(), mrpt::system::getCurrentTime(), mrpt::nav::CAbstractNavigator::TAbstractNavigatorParams::hysteresis_check_target_is_blocked, IDLE, internal_onStartNewNavigation(), m_badNavAlarm_lastMinDistTime, m_badNavAlarm_minDistTarget, m_counter_check_target_is_blocked, m_curPoseVel, m_lastNavigationState, m_latestPoses, m_navErrorReason, m_navigationEndEventSent, m_navigationParams, m_navigationState, m_pending_events, m_rethrow_exceptions, MRPT_LOG_DEBUG, MRPT_LOG_ERROR, MRPT_LOG_ERROR_FMT, MRPT_LOG_INFO, MRPT_LOG_THROTTLE_WARN, MRPT_LOG_WARN, NAV_ERROR, NAVIGATING, params_abstract_navigator, performNavigationStep(), mrpt::nav::CAbstractNavigator::TRobotPoseVel::pose, mrpt::poses::CPoseInterpolatorBase< DIM >::rbegin(), mrpt::nav::CRobot2NavInterface::sendNavigationEndEvent(), mrpt::nav::CRobot2NavInterface::sendNavigationStartEvent(), mrpt::nav::CRobot2NavInterface::sendWaySeemsBlockedEvent(), mrpt::poses::CPoseInterpolatorBase< DIM >::size(), stop(), mrpt::nav::CAbstractNavigator::TNavigationParams::target, mrpt::nav::CAbstractNavigator::TargetInfo::target_coords, mrpt::nav::CAbstractNavigator::TargetInfo::targetIsIntermediaryWaypoint, mrpt::system::timeDifference(), updateCurrentPoseAndSpeeds(), mrpt::math::TPose2D::x, and mrpt::math::TPose2D::y.
Referenced by navigationStep(), and mrpt::nav::CWaypointsNavigator::waypoints_navigationStep().
◆ processNavigateCommand()
|
protectedvirtual |
Does the job of navigate(), except the call to onNavigateCommandReceived()
Definition at line 309 of file CAbstractNavigator.cpp.
References ASSERT_, mrpt::nav::CAbstractNavigator::TNavigationParams::clone(), mrpt::utils::delete_safe(), mrpt::system::getCurrentTime(), m_badNavAlarm_lastMinDistTime, m_badNavAlarm_minDistTarget, m_curPoseVel, m_nav_cs, m_navErrorReason, m_navigationParams, m_navigationState, MRPT_END, MRPT_START, NAVIGATING, mrpt::nav::CAbstractNavigator::TRobotPoseVel::pose, mrpt::nav::CAbstractNavigator::TNavigationParams::target, mrpt::nav::CAbstractNavigator::TargetInfo::target_coords, mrpt::nav::CAbstractNavigator::TargetInfo::targetIsRelative, and updateCurrentPoseAndSpeeds().
Referenced by navigate(), and mrpt::nav::CWaypointsNavigator::waypoints_navigationStep().
◆ resetNavError()
|
virtual |
Resets a NAV_ERROR state back to IDLE
Definition at line 155 of file CAbstractNavigator.cpp.
References IDLE, m_nav_cs, m_navErrorReason, m_navigationState, MRPT_LOG_DEBUG, and NAV_ERROR.
◆ resume()
|
virtual |
Continues with suspended navigation.
- See also
- suspend
Definition at line 128 of file CAbstractNavigator.cpp.
References m_nav_cs, m_navigationState, MRPT_LOG_DEBUG, NAVIGATING, and SUSPENDED.
◆ saveConfigFile()
|
virtual |
Saves all current options to a config file.
Each derived class MUST save its own parameters, and then call ITS PARENT'S overriden method to ensure all params are saved.
Reimplemented in mrpt::nav::CWaypointsNavigator, mrpt::nav::CReactiveNavigationSystem3D, mrpt::nav::CReactiveNavigationSystem, mrpt::nav::CNavigatorManualSequence, and mrpt::nav::CAbstractPTGBasedReactive.
Definition at line 189 of file CAbstractNavigator.cpp.
References params_abstract_navigator, and mrpt::nav::CAbstractNavigator::TAbstractNavigatorParams::saveToConfigFile().
Referenced by loadConfigFile(), and mrpt::nav::CWaypointsNavigator::saveConfigFile().
◆ setFrameTF()
| void CAbstractNavigator::setFrameTF | ( | mrpt::poses::FrameTransformer< 2 > * | frame_tf | ) |
Sets a user-provided frame transformer object; used only if providing targets in a frame ID different than the one in which robot odometry is given (both IDs default to "map").
Ownership of the pointee object remains belonging to the user, which is responsible of deleting it and ensuring its a valid pointer during the lifetime of this navigator object.
- Todo:
- [MRPT 2.0: Make this a weak_ptr]
Definition at line 167 of file CAbstractNavigator.cpp.
References m_frame_tf.
◆ stop()
|
protectedvirtual |
Default: forward call to m_robot.stop(). Can be overriden.
Definition at line 422 of file CAbstractNavigator.cpp.
References m_robot, and mrpt::nav::CRobot2NavInterface::stop().
Referenced by cancel(), doEmergencyStop(), navigationStep(), mrpt::nav::CNavigatorManualSequence::navigationStep(), mrpt::nav::CAbstractPTGBasedReactive::performNavigationStep(), performNavigationStepNavigating(), mrpt::nav::CAbstractPTGBasedReactive::preDestructor(), suspend(), updateCurrentPoseAndSpeeds(), and mrpt::nav::CWaypointsNavigator::waypoints_navigationStep().
◆ suspend()
|
virtual |
Suspend current navegation.
- See also
- resume
Definition at line 141 of file CAbstractNavigator.cpp.
References m_nav_cs, m_navigationState, MRPT_LOG_DEBUG, NAVIGATING, stop(), and SUSPENDED.
◆ updateCurrentPoseAndSpeeds()
|
protectedvirtual |
Call to the robot getCurrentPoseAndSpeeds() and updates members m_curPoseVel accordingly.
If an error is returned by the user callback, first, it calls robot.stop() ,then throws an std::runtime_error exception.
Definition at line 349 of file CAbstractNavigator.cpp.
References mrpt::poses::CPoseInterpolatorBase< DIM >::begin(), mrpt::poses::CPoseInterpolatorBase< DIM >::clear(), mrpt::poses::CPoseInterpolatorBase< DIM >::erase(), ERR_EMERGENCY_STOP, mrpt::nav::CAbstractNavigator::TErrorReason::error_code, mrpt::nav::CAbstractNavigator::TErrorReason::error_msg, mrpt::nav::CRobot2NavInterface::getCurrentPoseAndSpeeds(), mrpt::nav::CRobot2NavInterface::getNavigationTime(), mrpt::poses::CPoseInterpolatorBase< DIM >::insert(), m_curPoseVel, m_last_curPoseVelUpdate_pose_frame_id, m_last_curPoseVelUpdate_robot_time, m_latestOdomPoses, m_latestPoses, m_navErrorReason, m_navigationState, m_robot, m_timlog_delays, MRPT_LOG_ERROR, MRPT_LOG_THROTTLE_DEBUG_FMT, NAV_ERROR, mrpt::math::TPose2D::phi, mrpt::nav::CAbstractNavigator::TRobotPoseVel::pose, mrpt::nav::CAbstractNavigator::TRobotPoseVel::pose_frame_id, PREVIOUS_POSES_MAX_AGE, mrpt::nav::CAbstractNavigator::TRobotPoseVel::rawOdometry, mrpt::poses::CPoseInterpolatorBase< DIM >::rbegin(), mrpt::math::TTwist2D::rotate(), mrpt::poses::CPoseInterpolatorBase< DIM >::size(), stop(), mrpt::system::timeDifference(), mrpt::nav::CAbstractNavigator::TRobotPoseVel::timestamp, mrpt::nav::CAbstractNavigator::TRobotPoseVel::velGlobal, and mrpt::nav::CAbstractNavigator::TRobotPoseVel::velLocal.
Referenced by performNavigationStepNavigating(), processNavigateCommand(), and mrpt::nav::CWaypointsNavigator::waypoints_navigationStep().
Member Data Documentation
◆ m_badNavAlarm_lastMinDistTime
|
protected |
Definition at line 295 of file CAbstractNavigator.h.
Referenced by performNavigationStepNavigating(), and processNavigateCommand().
◆ m_badNavAlarm_minDistTarget
|
protected |
For sending an alarm (error event) when it seems that we are not approaching toward the target in a while...
Definition at line 294 of file CAbstractNavigator.h.
Referenced by performNavigationStepNavigating(), and processNavigateCommand().
◆ m_counter_check_target_is_blocked
|
private |
Definition at line 196 of file CAbstractNavigator.h.
Referenced by performNavigationStepNavigating().
◆ m_curPoseVel
|
protected |
Current robot pose (updated in CAbstractNavigator::navigationStep() )
Definition at line 286 of file CAbstractNavigator.h.
Referenced by mrpt::nav::CAbstractPTGBasedReactive::build_movement_candidate(), mrpt::nav::CAbstractPTGBasedReactive::calc_move_candidate_scores(), mrpt::nav::CReactiveNavigationSystem::implementSenseObstacles(), mrpt::nav::CAbstractPTGBasedReactive::performNavigationStep(), performNavigationStepNavigating(), processNavigateCommand(), mrpt::nav::CAbstractPTGBasedReactive::STEP8_GenerateLogRecord(), updateCurrentPoseAndSpeeds(), and mrpt::nav::CWaypointsNavigator::waypoints_navigationStep().
◆ m_frame_tf
|
protected |
Optional, user-provided frame transformer.
Note: We dont have ownership of the pointee object!
Definition at line 272 of file CAbstractNavigator.h.
Referenced by mrpt::nav::CAbstractPTGBasedReactive::performNavigationStep(), and setFrameTF().
◆ m_last_curPoseVelUpdate_pose_frame_id
|
protected |
Definition at line 288 of file CAbstractNavigator.h.
Referenced by updateCurrentPoseAndSpeeds().
◆ m_last_curPoseVelUpdate_robot_time
|
protected |
Definition at line 287 of file CAbstractNavigator.h.
Referenced by mrpt::nav::CAbstractPTGBasedReactive::onStartNewNavigation(), and updateCurrentPoseAndSpeeds().
◆ m_lastNavigationState
|
private |
Last internal state of navigator:
Definition at line 193 of file CAbstractNavigator.h.
Referenced by navigationStep(), and performNavigationStepNavigating().
◆ m_latestOdomPoses
|
protected |
Latest robot poses (updated in CAbstractNavigator::navigationStep() )
Definition at line 289 of file CAbstractNavigator.h.
Referenced by CAbstractNavigator(), internal_onStartNewNavigation(), mrpt::nav::CAbstractPTGBasedReactive::performNavigationStep(), and updateCurrentPoseAndSpeeds().
◆ m_latestPoses
|
protected |
Definition at line 289 of file CAbstractNavigator.h.
Referenced by CAbstractNavigator(), internal_onStartNewNavigation(), mrpt::nav::CAbstractPTGBasedReactive::performNavigationStep(), performNavigationStepNavigating(), and updateCurrentPoseAndSpeeds().
◆ m_nav_cs
|
protected |
mutex for all navigation methods
Definition at line 274 of file CAbstractNavigator.h.
Referenced by cancel(), mrpt::nav::CAbstractPTGBasedReactive::enableLogFile(), mrpt::nav::CAbstractPTGBasedReactive::initialize(), navigationStep(), onNavigateCommandReceived(), mrpt::nav::CAbstractPTGBasedReactive::preDestructor(), processNavigateCommand(), resetNavError(), resume(), mrpt::nav::CAbstractPTGBasedReactive::setHolonomicMethod(), and suspend().
◆ m_navErrorReason
|
private |
Definition at line 194 of file CAbstractNavigator.h.
Referenced by dispatchPendingNavEvents(), doEmergencyStop(), performNavigationStepNavigating(), processNavigateCommand(), resetNavError(), and updateCurrentPoseAndSpeeds().
◆ m_navigationEndEventSent
|
private |
Will be false until the navigation end is sent, and it is reset with each new command.
Definition at line 195 of file CAbstractNavigator.h.
Referenced by onNavigateCommandReceived(), and performNavigationStepNavigating().
◆ m_navigationParams
|
protected |
Current navigation parameters.
Definition at line 266 of file CAbstractNavigator.h.
Referenced by mrpt::nav::CAbstractPTGBasedReactive::calc_move_candidate_scores(), mrpt::nav::CWaypointsNavigator::checkHasReachedTarget(), onNavigateCommandReceived(), mrpt::nav::CAbstractPTGBasedReactive::performNavigationStep(), performNavigationStepNavigating(), processNavigateCommand(), and ~CAbstractNavigator().
◆ m_navigationState
|
protected |
Current internal state of navigator:
Definition at line 265 of file CAbstractNavigator.h.
Referenced by cancel(), dispatchPendingNavEvents(), doEmergencyStop(), navigationStep(), mrpt::nav::CWaypointsNavigator::navigationStep(), performNavigationStepNavigating(), processNavigateCommand(), resetNavError(), resume(), suspend(), and updateCurrentPoseAndSpeeds().
◆ m_pending_events
|
protected |
Events generated during navigationStep(), enqueued to be called at the end of the method execution to avoid user code to change the navigator state.
Definition at line 222 of file CAbstractNavigator.h.
Referenced by dispatchPendingNavEvents(), navigationStep(), mrpt::nav::CAbstractPTGBasedReactive::performNavigationStep(), performNavigationStepNavigating(), and mrpt::nav::CWaypointsNavigator::waypoints_navigationStep().
◆ m_rethrow_exceptions
|
private |
Definition at line 197 of file CAbstractNavigator.h.
Referenced by performNavigationStepNavigating().
◆ m_robot
|
protected |
The navigator-robot interface.
Definition at line 268 of file CAbstractNavigator.h.
Referenced by changeSpeeds(), changeSpeedsNOP(), dispatchPendingNavEvents(), mrpt::nav::CReactiveNavigationSystem::implementSenseObstacles(), mrpt::nav::CReactiveNavigationSystem3D::implementSenseObstacles(), mrpt::nav::CNavigatorManualSequence::initialize(), internal_onStartNewNavigation(), navigationStep(), mrpt::nav::CNavigatorManualSequence::navigationStep(), mrpt::nav::CAbstractPTGBasedReactive::performNavigationStep(), stop(), updateCurrentPoseAndSpeeds(), and mrpt::nav::CWaypointsNavigator::waypoints_navigationStep().
◆ m_timlog_delays
|
protected |
Time logger to collect delay-related stats.
Definition at line 291 of file CAbstractNavigator.h.
Referenced by mrpt::nav::CReactiveNavigationSystem::implementSenseObstacles(), mrpt::nav::CReactiveNavigationSystem3D::implementSenseObstacles(), navigationStep(), mrpt::nav::CAbstractPTGBasedReactive::performNavigationStep(), mrpt::nav::CAbstractPTGBasedReactive::STEP8_GenerateLogRecord(), updateCurrentPoseAndSpeeds(), and mrpt::nav::CWaypointsNavigator::waypoints_navigationStep().
◆ params_abstract_navigator
| TAbstractNavigatorParams mrpt::nav::CAbstractNavigator::params_abstract_navigator |
Definition at line 187 of file CAbstractNavigator.h.
Referenced by loadConfigFile(), performNavigationStepNavigating(), and saveConfigFile().