Pose from Orthogonality and Scaling (POSIT) - Eigen Implementation. More...
Detailed Description
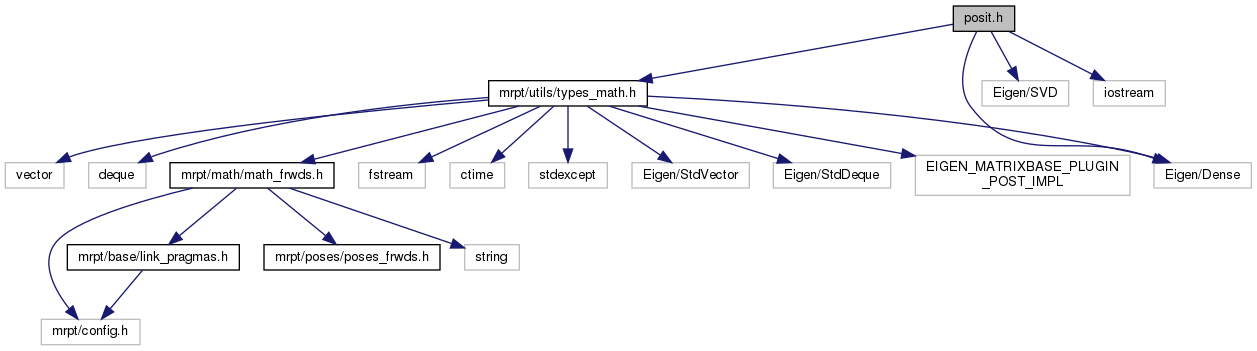
Include dependency graph for posit.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | mrpt::vision::pnp::posit |
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::vision | |
| Classes for computer vision, detectors, features, etc. | |
| mrpt::vision::pnp | |
| Perspective n Point (PnP) Algorithms toolkit for MRPT. | |
Macros | |
| #define | LOOP_MAX_COUNT 30 |