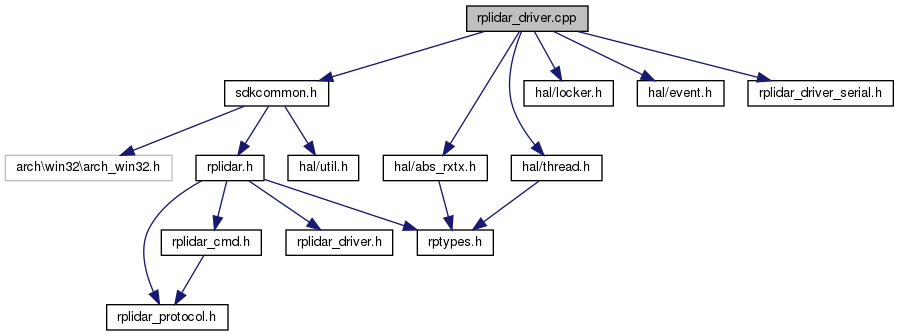
#include "sdkcommon.h"#include "hal/abs_rxtx.h"#include "hal/thread.h"#include "hal/locker.h"#include "hal/event.h"#include "rplidar_driver_serial.h"
Include dependency graph for rplidar_driver.cpp:
Go to the source code of this file.
Namespaces | |
| rp | |
| rp::standalone | |
| rp::standalone::rplidar | |
Macros | |
| #define | min(a, b) (((a) < (b)) ? (a) : (b)) |