#include <mrpt/random.h>#include <mrpt/poses/CPose2D.h>#include <mrpt/poses/CPosePDFGaussian.h>#include <mrpt/poses/CPosePDFSOG.h>#include <mrpt/math/geometry.h>#include <mrpt/tfest/se2.h>#include <mrpt/maps/CSimplePointsMap.h>#include <gtest/gtest.h>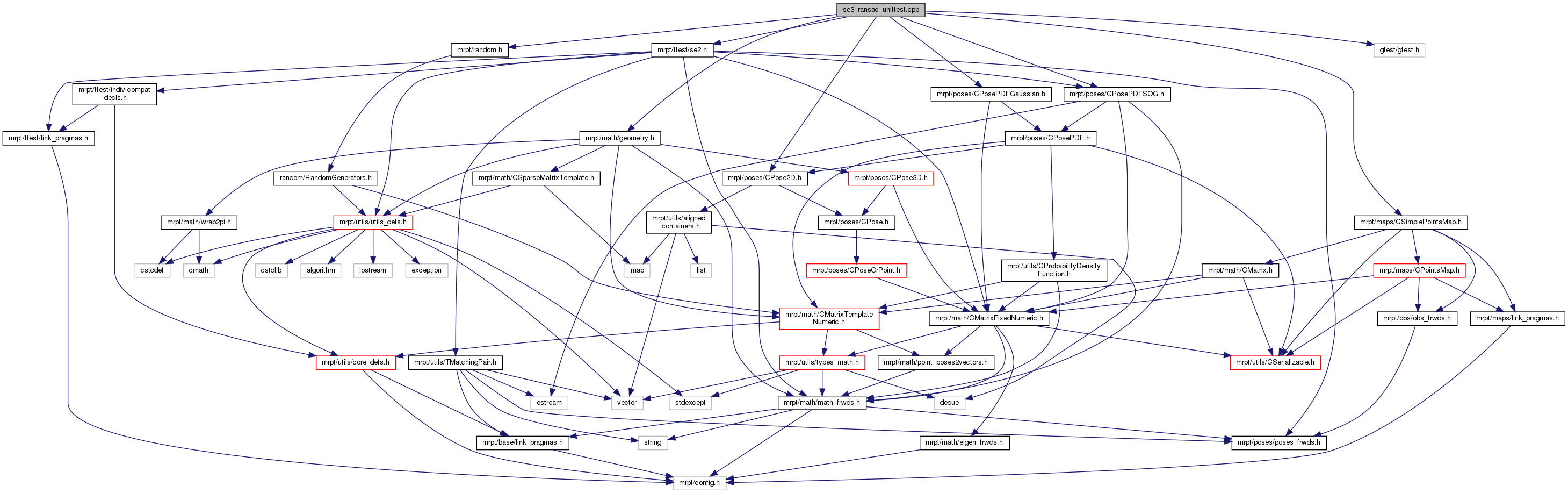
Go to the source code of this file.
Classes | |
| struct | TObs |
Functions | |
| bool | ransac_data_assoc_run () |
| TEST (tfest, ransac_data_assoc) | |
Variables | |
| const size_t | NUM_OBSERVATIONS_TO_SIMUL = 15 |
| const size_t | RANSAC_MINIMUM_INLIERS = 9 |
| const float | normalizationStd = 0.10f |
| const float | ransac_mahalanobisDistanceThreshold = 5.0f |
| const size_t | MINIMUM_RANSAC_ITERS = 100000 |
| const size_t | NUM_MAP_FEATS = 50 |
| const double | MAP_SIZE_X = 30 |
| const double | MAP_SIZE_Y = 15 |
Function Documentation
◆ ransac_data_assoc_run()
| bool ransac_data_assoc_run | ( | ) |
Definition at line 54 of file se3_ransac_unittest.cpp.
References ASSERT_, mrpt::poses::CPose2D::composePoint(), mrpt::poses::CPosePDFGaussian::cov, mrpt::utils::DEG2RAD(), mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::distanceTo(), mrpt::random::CRandomGenerator::drawGaussian1D(), mrpt::random::CRandomGenerator::drawUniform(), mrpt::maps::CPointsMap::getPoint(), mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::kdTreeRadiusSearch2D(), mrpt::tfest::TSE2RobustResult::largestSubSet, M_PI, MAP_SIZE_X, MAP_SIZE_Y, mrpt::poses::CPosePDFGaussian::mean, MINIMUM_RANSAC_ITERS, normalizationStd, NUM_MAP_FEATS, NUM_OBSERVATIONS_TO_SIMUL, mrpt::utils::TMatchingPair::other_idx, mrpt::utils::TMatchingPair::other_x, mrpt::utils::TMatchingPair::other_y, mrpt::poses::CPose2D::phi(), mrpt::random::randomGenerator, mrpt::random::CRandomGenerator::randomize(), ransac_mahalanobisDistanceThreshold, RANSAC_MINIMUM_INLIERS, mrpt::maps::CSimplePointsMap::resize(), mrpt::tfest::se2_l2(), mrpt::tfest::se2_l2_robust(), mrpt::maps::CPointsMap::setPoint(), mrpt::maps::CPointsMap::size(), mrpt::math::square(), mrpt::utils::TMatchingPair::this_idx, mrpt::utils::TMatchingPair::this_x, mrpt::utils::TMatchingPair::this_y, mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::x(), and mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::y().
Referenced by TEST().
◆ TEST()
| TEST | ( | tfest | , |
| ransac_data_assoc | |||
| ) |
Definition at line 165 of file se3_ransac_unittest.cpp.
References ransac_data_assoc_run().
Variable Documentation
◆ MAP_SIZE_X
| const double MAP_SIZE_X = 30 |
Definition at line 42 of file se3_ransac_unittest.cpp.
Referenced by ransac_data_assoc_run().
◆ MAP_SIZE_Y
| const double MAP_SIZE_Y = 15 |
Definition at line 43 of file se3_ransac_unittest.cpp.
Referenced by ransac_data_assoc_run().
◆ MINIMUM_RANSAC_ITERS
| const size_t MINIMUM_RANSAC_ITERS = 100000 |
Definition at line 39 of file se3_ransac_unittest.cpp.
Referenced by ransac_data_assoc_run().
◆ normalizationStd
| const float normalizationStd = 0.10f |
Definition at line 37 of file se3_ransac_unittest.cpp.
Referenced by mrpt::slam::CICP::TConfigParams::dumpToTextStream(), mrpt::slam::CICP::TConfigParams::loadFromConfigFile(), ransac_data_assoc_run(), mrpt::scanmatching::robustRigidTransformation(), and mrpt::tfest::se2_l2_robust().
◆ NUM_MAP_FEATS
| const size_t NUM_MAP_FEATS = 50 |
Definition at line 41 of file se3_ransac_unittest.cpp.
Referenced by ransac_data_assoc_run().
◆ NUM_OBSERVATIONS_TO_SIMUL
| const size_t NUM_OBSERVATIONS_TO_SIMUL = 15 |
Definition at line 34 of file se3_ransac_unittest.cpp.
Referenced by ransac_data_assoc_run().
◆ ransac_mahalanobisDistanceThreshold
| const float ransac_mahalanobisDistanceThreshold = 5.0f |
Definition at line 38 of file se3_ransac_unittest.cpp.
Referenced by mrpt::slam::CGridMapAligner::TConfigParams::dumpToTextStream(), mrpt::slam::CICP::TConfigParams::dumpToTextStream(), mrpt::slam::CGridMapAligner::TConfigParams::loadFromConfigFile(), mrpt::slam::CICP::TConfigParams::loadFromConfigFile(), ransac_data_assoc_run(), and mrpt::scanmatching::robustRigidTransformation().
◆ RANSAC_MINIMUM_INLIERS
| const size_t RANSAC_MINIMUM_INLIERS = 9 |
Definition at line 35 of file se3_ransac_unittest.cpp.
Referenced by ransac_data_assoc_run().