#include "nav-precomp.h"#include <mrpt/nav/tpspace/CPTG_DiffDrive_C.h>#include <mrpt/math/wrap2pi.h>Go to the source code of this file.
Functions | |
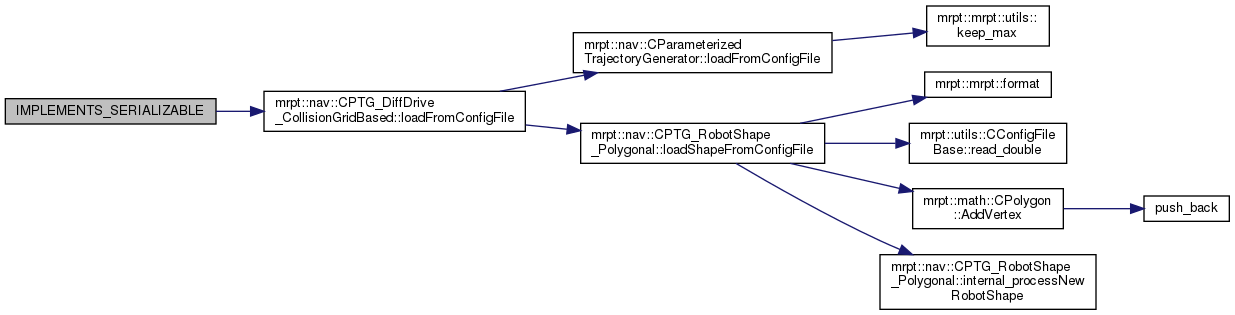
| IMPLEMENTS_SERIALIZABLE (CPTG_DiffDrive_C, CParameterizedTrajectoryGenerator, mrpt::nav) void CPTG_DiffDrive_C | |
Function Documentation
◆ IMPLEMENTS_SERIALIZABLE()
| IMPLEMENTS_SERIALIZABLE | ( | CPTG_DiffDrive_C | , |
| CParameterizedTrajectoryGenerator | , | ||
| mrpt::nav | |||
| ) |
Definition at line 19 of file CPTG_DiffDrive_C.cpp.
References mrpt::nav::CPTG_DiffDrive_CollisionGridBased::loadFromConfigFile(), and MRPT_LOAD_CONFIG_VAR_NO_DEFAULT.
Here is the call graph for this function: