Detailed Description
A class for grabing images from a IEEE1394 (Firewire) camera using the libdc1394-2 library.
See the constructor for the options when opening the camera. Notice that you may have to carefully set the resolution, framerate and color_mode. See the verbose parameter of the constructor, which can display a list of supported modes in your camera.
This class is able to manage any Firewire cameras, including Stereo or multi-cameras in general, so this can be used to open the Bumblebee camera (not tested yet).
A static method (CImageGrabber_dc1394::enumerateCameras) is provided to enumerate all existing cameras and their properties. It can be used to find the GUID of the desired camera, then open it at the constructor.
- Note
- This class requires MRPT compiled with "libdc1394-2" (Only works under Linux for now) and "opencv".
- In Linux you may need to execute "chmod 666 /dev/video1394/ * " and "chmod 666 /dev/raw1394" for allowing any user R/W access to firewire cameras.
- [New in MRPT 1.3.0] Length of ring buffer is now configurable via TCaptureOptions_dc1394::ring_buffer_size
- See also
- The most generic camera grabber in MRPT: mrpt::hwdrivers::CCameraSensor
Definition at line 152 of file CImageGrabber_dc1394.h.
#include <mrpt/hwdrivers/CImageGrabber_dc1394.h>
Classes | |
| struct | TCameraInfo |
| Used in enumerateCameras. More... | |
Public Types | |
| typedef std::list< TCameraInfo > | TCameraInfoList |
Public Member Functions | |
| CImageGrabber_dc1394 (uint64_t cameraGUID=0, uint16_t cameraUnit=0, const TCaptureOptions_dc1394 &options=TCaptureOptions_dc1394(), bool verbose=false) | |
| Constructor: open an ieee1394 camera. More... | |
| virtual | ~CImageGrabber_dc1394 () |
| Destructor. More... | |
| bool | isOpen () const |
| Check whether the camera has been open successfully. More... | |
| bool | changeCaptureOptions (const TCaptureOptions_dc1394 &options) |
| Changes the capture properties (brightness, gain, shutter, etc) The frame size, framerate, and color_coding fields in options are ignored since they can be only set at construction time. More... | |
| bool | getObservation (mrpt::obs::CObservationImage &out_observation) |
| Grab an image from the opened camera (for monocular cameras). More... | |
| bool | getObservation (mrpt::obs::CObservationStereoImages &out_observation) |
| Grab an image from the opened camera (for stereo cameras). More... | |
| bool | setSoftwareTriggerLevel (bool level) |
| Changes the boolean level associated to Software Trigger (ON/OFF) Can be used to control camera triggering trough software. More... | |
Static Public Member Functions | |
| static void | enumerateCameras (TCameraInfoList &out_list) |
| Generates a list with the information on all the existing (Firewire) cameras in the system. More... | |
Protected Attributes | |
| bool | m_bInitialized |
| Set to false if we could not initialize the camera. More... | |
| void * | m_dc1394_lib_context |
| Internal use: More... | |
| void * | m_dc1394camera |
| int | m_desired_mode |
| TCaptureOptions_dc1394 | m_options |
Member Typedef Documentation
◆ TCameraInfoList
| typedef std::list<TCameraInfo> mrpt::hwdrivers::CImageGrabber_dc1394::TCameraInfoList |
Definition at line 248 of file CImageGrabber_dc1394.h.
Constructor & Destructor Documentation
◆ CImageGrabber_dc1394()
| CImageGrabber_dc1394::CImageGrabber_dc1394 | ( | uint64_t | cameraGUID = 0, |
| uint16_t | cameraUnit = 0, |
||
| const TCaptureOptions_dc1394 & | options = TCaptureOptions_dc1394(), |
||
| bool | verbose = false |
||
| ) |
Constructor: open an ieee1394 camera.
- Parameters
-
cameraGUID Set the camera GUID to open, or 0 to open the first found camera. cameraUnit (Ignored if cameraGUID=0). The number of camera to open within the device with the given GUID: In a stereo camera this may be 0 or 1. Normally this is 0. options Capture options, defined in mrpt::hwdrivers::TCaptureOptions_dc1394. verbose Displays a lot of information about the camera to be open and its valid video modes.
Definition at line 33 of file CImageGrabber_dc1394.cpp.
References ASSERT_, changeCaptureOptions(), mrpt::hwdrivers::TCaptureOptions_dc1394::color_coding, mrpt::format(), mrpt::hwdrivers::TCaptureOptions_dc1394::frame_height, mrpt::hwdrivers::TCaptureOptions_dc1394::frame_width, mrpt::hwdrivers::TCaptureOptions_dc1394::framerate, mrpt::hwdrivers::FRAMERATE_120, mrpt::hwdrivers::FRAMERATE_15, mrpt::hwdrivers::FRAMERATE_1_875, mrpt::hwdrivers::FRAMERATE_240, mrpt::hwdrivers::FRAMERATE_30, mrpt::hwdrivers::FRAMERATE_3_75, mrpt::hwdrivers::FRAMERATE_60, mrpt::hwdrivers::FRAMERATE_7_5, m_bInitialized, m_dc1394_lib_context, m_dc1394camera, m_desired_mode, m_options, mrpt::hwdrivers::TCaptureOptions_dc1394::mode7, MRPT_END, MRPT_START, mrpt::hwdrivers::TCaptureOptions_dc1394::ring_buffer_size, THE_CAMERA, THE_CONTEXT, THROW_EXCEPTION, and mrpt::hwdrivers::TCaptureOptions_dc1394::trigger_power.

◆ ~CImageGrabber_dc1394()
|
virtual |
Destructor.
Definition at line 463 of file CImageGrabber_dc1394.cpp.
References m_bInitialized, THE_CAMERA, and THE_CONTEXT.
Member Function Documentation
◆ changeCaptureOptions()
| bool CImageGrabber_dc1394::changeCaptureOptions | ( | const TCaptureOptions_dc1394 & | options | ) |
Changes the capture properties (brightness, gain, shutter, etc) The frame size, framerate, and color_coding fields in options are ignored since they can be only set at construction time.
- Returns
- false on error
Definition at line 692 of file CImageGrabber_dc1394.cpp.
References m_bInitialized, MRPT_END, MRPT_START, and THROW_EXCEPTION.
Referenced by CImageGrabber_dc1394().

◆ enumerateCameras()
|
static |
Generates a list with the information on all the existing (Firewire) cameras in the system.
- Exceptions
-
std::runtime_error On any error calling libdc1394.
Definition at line 778 of file CImageGrabber_dc1394.cpp.
References mrpt::hwdrivers::CImageGrabber_dc1394::TCameraInfo::advanced_features_csr, mrpt::hwdrivers::CImageGrabber_dc1394::TCameraInfo::bmode_capable, mrpt::hwdrivers::CImageGrabber_dc1394::TCameraInfo::can_switch_on_off, mrpt::hwdrivers::CImageGrabber_dc1394::TCameraInfo::command_registers_base, mrpt::format(), mrpt::hwdrivers::CImageGrabber_dc1394::TCameraInfo::format7_csr, mrpt::hwdrivers::CImageGrabber_dc1394::TCameraInfo::guid, mrpt::hwdrivers::CImageGrabber_dc1394::TCameraInfo::has_feature_error_status, mrpt::hwdrivers::CImageGrabber_dc1394::TCameraInfo::has_vmode_error_status, mrpt::hwdrivers::CImageGrabber_dc1394::TCameraInfo::iidc_version, mrpt::hwdrivers::CImageGrabber_dc1394::TCameraInfo::max_mem_channel, mrpt::hwdrivers::CImageGrabber_dc1394::TCameraInfo::model, mrpt::hwdrivers::CImageGrabber_dc1394::TCameraInfo::model_id, MRPT_END, MRPT_START, mrpt::hwdrivers::CImageGrabber_dc1394::TCameraInfo::multi_shot_capable, mrpt::hwdrivers::CImageGrabber_dc1394::TCameraInfo::one_shot_capable, mrpt::hwdrivers::CImageGrabber_dc1394::TCameraInfo::PIO_control_csr, mrpt::hwdrivers::CImageGrabber_dc1394::TCameraInfo::SIO_control_csr, mrpt::hwdrivers::CImageGrabber_dc1394::TCameraInfo::strobe_control_csr, THROW_EXCEPTION, THROW_STACKED_EXCEPTION, mrpt::hwdrivers::CImageGrabber_dc1394::TCameraInfo::unit, mrpt::hwdrivers::CImageGrabber_dc1394::TCameraInfo::unit_dependent_directory, mrpt::hwdrivers::CImageGrabber_dc1394::TCameraInfo::unit_directory, mrpt::hwdrivers::CImageGrabber_dc1394::TCameraInfo::unit_spec_ID, mrpt::hwdrivers::CImageGrabber_dc1394::TCameraInfo::unit_sub_sw_version, mrpt::hwdrivers::CImageGrabber_dc1394::TCameraInfo::unit_sw_version, mrpt::hwdrivers::CImageGrabber_dc1394::TCameraInfo::vendor, and mrpt::hwdrivers::CImageGrabber_dc1394::TCameraInfo::vendor_id.

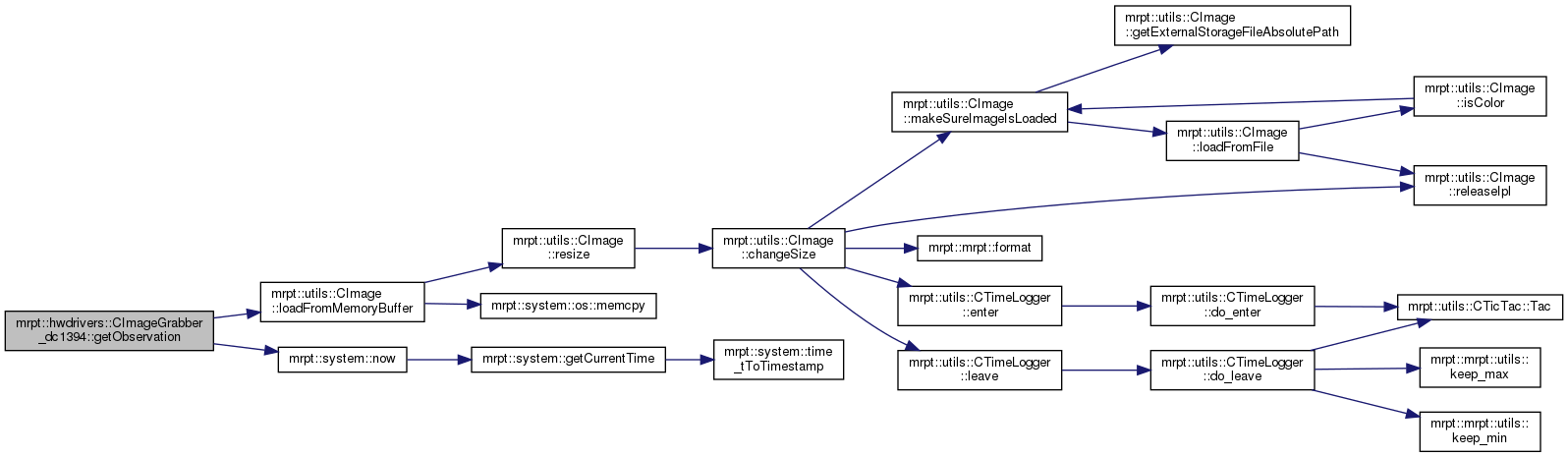
◆ getObservation() [1/2]
| bool CImageGrabber_dc1394::getObservation | ( | mrpt::obs::CObservationImage & | out_observation | ) |
Grab an image from the opened camera (for monocular cameras).
- Parameters
-
out_observation The object to be filled with sensed data.
- Note
- This may be blocking when using software trigger and no frame is available yet. Ensure trigger before getObservation() or take into account that this call may block.
- Returns
- false on any error, true if all go fine.
Definition at line 493 of file CImageGrabber_dc1394.cpp.
References mrpt::hwdrivers::TCaptureOptions_dc1394::deinterlace_stereo, mrpt::obs::CObservationImage::image, mrpt::utils::CImage::loadFromMemoryBuffer(), m_bInitialized, m_options, MRPT_END, MRPT_START, mrpt::system::now(), THE_CAMERA, THROW_EXCEPTION, and mrpt::obs::CObservation::timestamp.
Referenced by mrpt::hwdrivers::CStereoGrabber_Bumblebee_libdc1394::getStereoObservation().

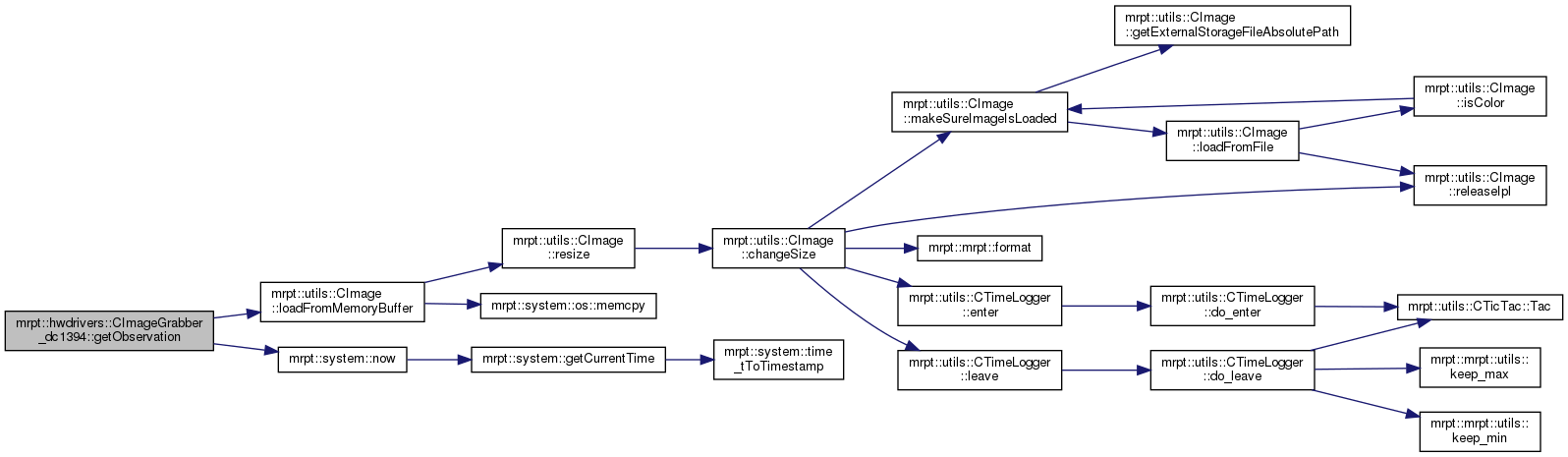
◆ getObservation() [2/2]
| bool CImageGrabber_dc1394::getObservation | ( | mrpt::obs::CObservationStereoImages & | out_observation | ) |
Grab an image from the opened camera (for stereo cameras).
- Parameters
-
out_observation The object to be filled with sensed data.
- Returns
- false on any error, true if all go fine.
Definition at line 609 of file CImageGrabber_dc1394.cpp.
References mrpt::hwdrivers::TCaptureOptions_dc1394::deinterlace_stereo, mrpt::obs::CObservationStereoImages::imageLeft, mrpt::obs::CObservationStereoImages::imageRight, mrpt::utils::CImage::loadFromMemoryBuffer(), m_bInitialized, m_options, MRPT_END, MRPT_START, mrpt::system::now(), THE_CAMERA, THROW_EXCEPTION, and mrpt::obs::CObservation::timestamp.
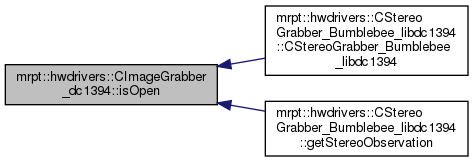
◆ isOpen()
|
inline |
Check whether the camera has been open successfully.
Definition at line 188 of file CImageGrabber_dc1394.h.
References m_bInitialized.
Referenced by mrpt::hwdrivers::CStereoGrabber_Bumblebee_libdc1394::CStereoGrabber_Bumblebee_libdc1394(), and mrpt::hwdrivers::CStereoGrabber_Bumblebee_libdc1394::getStereoObservation().
◆ setSoftwareTriggerLevel()
| bool CImageGrabber_dc1394::setSoftwareTriggerLevel | ( | bool | level | ) |
Changes the boolean level associated to Software Trigger (ON/OFF) Can be used to control camera triggering trough software.
- Returns
- false on error
Definition at line 753 of file CImageGrabber_dc1394.cpp.
References m_bInitialized, MRPT_END, MRPT_START, THE_CAMERA, and THROW_EXCEPTION.
Member Data Documentation
◆ m_bInitialized
|
protected |
Set to false if we could not initialize the camera.
Definition at line 157 of file CImageGrabber_dc1394.h.
Referenced by changeCaptureOptions(), CImageGrabber_dc1394(), getObservation(), isOpen(), setSoftwareTriggerLevel(), and ~CImageGrabber_dc1394().
◆ m_dc1394_lib_context
|
protected |
Internal use:
Definition at line 160 of file CImageGrabber_dc1394.h.
Referenced by CImageGrabber_dc1394().
◆ m_dc1394camera
|
protected |
Definition at line 161 of file CImageGrabber_dc1394.h.
Referenced by CImageGrabber_dc1394().
◆ m_desired_mode
|
protected |
Definition at line 162 of file CImageGrabber_dc1394.h.
Referenced by CImageGrabber_dc1394().
◆ m_options
|
protected |
Definition at line 164 of file CImageGrabber_dc1394.h.
Referenced by CImageGrabber_dc1394(), and getObservation().