Implementation of pointcloud filtering based on requisities for minimum neigbouring points in both, the current timestamp and a previous one.
- See also
- CPointsMap
Definition at line 28 of file CPointCloudFilterByDistance.h.
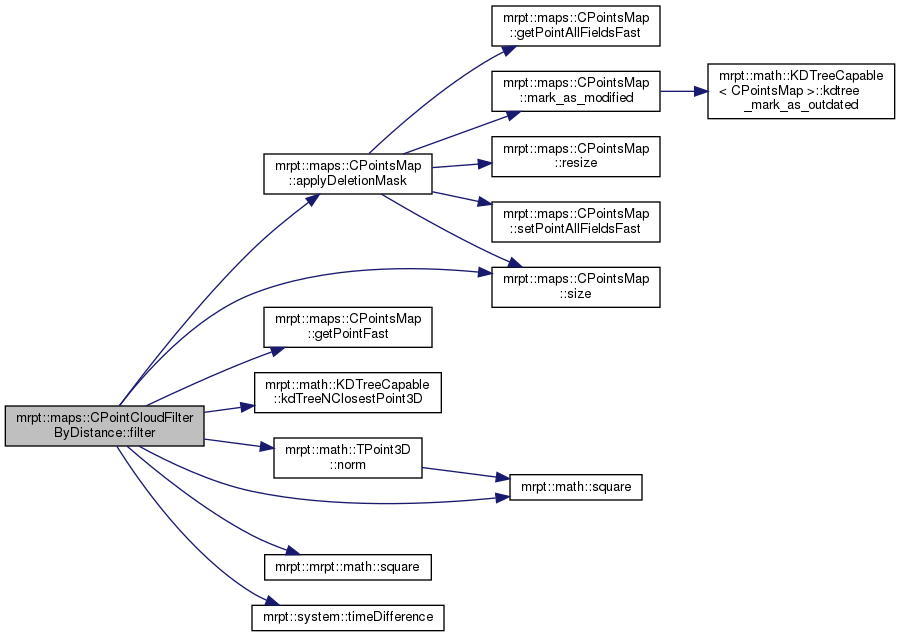
Apply the filtering algorithm to the pointcloud.
- Parameters
-
| [in,out] | inout_pointcloud | The input pointcloud, which will be modified upon return after filtering. |
| [in] | pc_timestamp | The timestamp of the input pointcloud |
| [in] | pc_reference_pose | If nullptr, the PC is assumed to be given in global coordinates. Otherwise, it will be transformed from local coordinates to global using this transformation. |
| [in,out] | params | additional in/out parameters |
Implements mrpt::maps::CPointCloudFilterBase.
Definition at line 19 of file CPointCloudFilterByDistance.cpp.
References mrpt::maps::CPointsMap::applyDeletionMask(), ASSERT_, mrpt::maps::CPointsMap::getPointFast(), INVALID_TIMESTAMP, mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::kdTreeNClosestPoint3D(), MRPT_END, MRPT_START, mrpt::math::TPoint3D::norm(), mrpt::maps::CPointCloudFilterByDistance::FrameInfo::pc, mrpt::maps::CPointCloudFilterByDistance::FrameInfo::pose, mrpt::maps::CPointsMap::size(), mrpt::mrpt::math::square(), mrpt::math::square(), mrpt::system::timeDifference(), mrpt::math::TPoint3Df::x, mrpt::math::TPoint3Df::y, and mrpt::math::TPoint3Df::z.
Referenced by run_pc_filter_test().