CSimpleMap.cpp File Reference
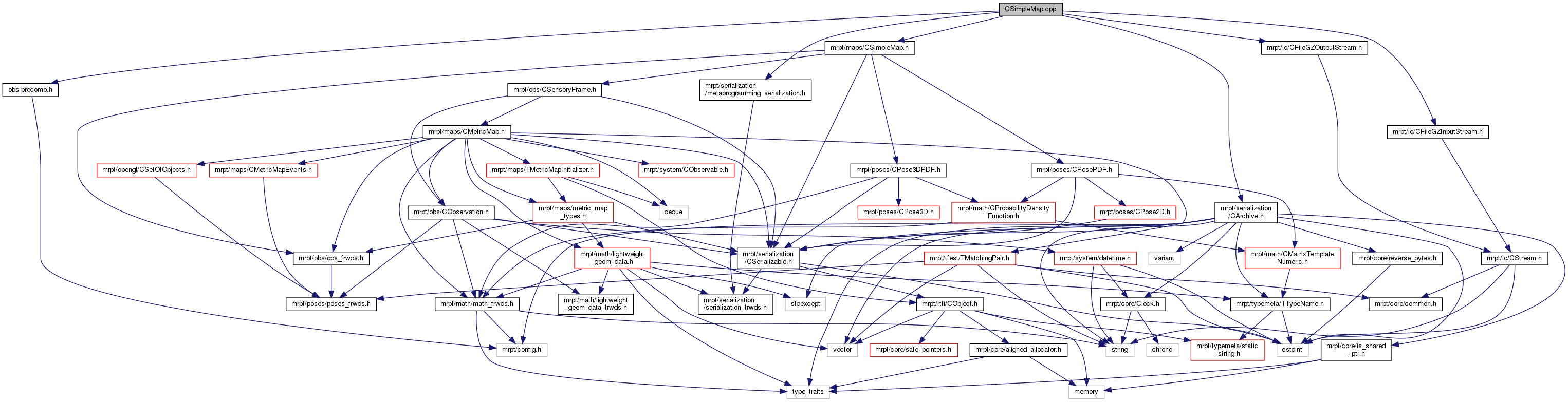
#include "obs-precomp.h"#include <mrpt/maps/CSimpleMap.h>#include <mrpt/io/CFileGZInputStream.h>#include <mrpt/io/CFileGZOutputStream.h>#include <mrpt/serialization/CArchive.h>#include <mrpt/serialization/metaprogramming_serialization.h>
Include dependency graph for CSimpleMap.cpp:
Go to the source code of this file.
Variables | |
| const auto | fn_pair_make_unique |
Variable Documentation
◆ fn_pair_make_unique
| const auto fn_pair_make_unique |
Initial value:
= [](auto& ptr) {
ptr.second.reset(
}
Declares a class for storing a "sensory frame", a set of "observations" taken by the robot approximat...
Definition: CSensoryFrame.h:53
Declares a class that represents a Probability Density Function (PDF) of a 3D pose (6D actually).
Definition: CPose3DPDF.h:42
Definition at line 28 of file CSimpleMap.cpp.
Referenced by mrpt::maps::CSimpleMap::CSimpleMap(), and mrpt::maps::CSimpleMap::operator=().