Detailed Description
template<typename T>
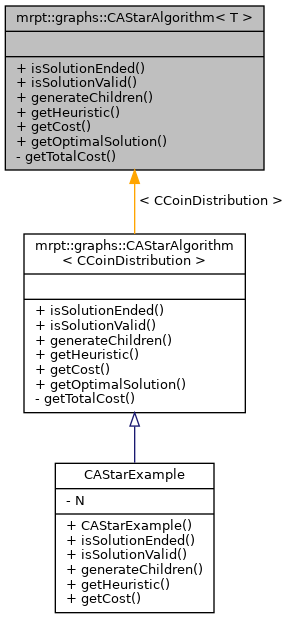
class mrpt::graphs::CAStarAlgorithm< T >
This class is intended to efficiently solve graph-search problems using heuristics to determine the best path.
To use it, a solution class must be defined so that it contains all the information about any partial or complete solution. Then, a class inheriting from CAStarAlgorithm<Solution class> must also be implemented, overriding five virtual methods which define the behaviour of the solutions. These methods are isSolutionEnded, isSolutionValid, generateChildren, getHeuristic and getCost. Once both classes are generated, each object of the class inheriting from CAStarAlgorithm represents a problem who can be solved by calling getOptimalSolution. See http://en.wikipedia.org/wiki/A*_search_algorithm for details about how this algorithm works.
- See also
- CAStarAlgorithm::isSolutionEnded
- CAStarAlgorithm::isSolutionValid
- CAStarAlgorithm::generateChildren
- CAStarAlgorithm::getHeuristic
- CAStarAlgorithm::getCost
Definition at line 39 of file CAStarAlgorithm.h.
#include <mrpt/graphs/CAStarAlgorithm.h>
Public Member Functions | |
| virtual bool | isSolutionEnded (const T &sol)=0 |
| Client code must implement this method. More... | |
| virtual bool | isSolutionValid (const T &sol)=0 |
| Client code must implement this method. More... | |
| virtual void | generateChildren (const T &sol, std::vector< T > &sols)=0 |
| Client code must implement this method. More... | |
| virtual double | getHeuristic (const T &sol)=0 |
| Client code must implement this method. More... | |
| virtual double | getCost (const T &sol)=0 |
| Client code must implement this method. More... | |
| int | getOptimalSolution (const T &initialSol, T &finalSol, double upperLevel=HUGE_VAL, double maxComputationTime=HUGE_VAL) |
| Finds the optimal solution for a problem, using the A* algorithm. More... | |
Private Member Functions | |
| double | getTotalCost (const T &sol) |
| Calculates the total cost (known+estimated) of a solution. More... | |
Member Function Documentation
◆ generateChildren()
|
pure virtual |
Client code must implement this method.
Given a partial solution, returns all its children solution, regardless of their validity or completeness.
Implemented in CAStarExample.
Referenced by mrpt::graphs::CAStarAlgorithm< T >::getOptimalSolution().
◆ getCost()
|
pure virtual |
Client code must implement this method.
Given a (possibly partial) solution, calculates its cost so far. This cost must not decrease with each step. That is, a solution cannot have a smaller cost than the previous one from which it was generated.
Implemented in CAStarExample.
Referenced by mrpt::graphs::CAStarAlgorithm< T >::getTotalCost().
◆ getHeuristic()
|
pure virtual |
Client code must implement this method.
Given a partial solution, estimates the cost of the remaining (unknown) part. This cost must always be greater or equal to zero, and not greater than the actual cost. Thus, must be 0 if the solution is complete.
Implemented in CAStarExample.
Referenced by mrpt::graphs::CAStarAlgorithm< T >::getTotalCost().
◆ getOptimalSolution()
|
inline |
Finds the optimal solution for a problem, using the A* algorithm.
Returns whether an optimal solution was actually found. Returns 0 if no solution was found, 1 if an optimal solution was found and 2 if a (possibly suboptimal) solution was found but the time lapse ended.
Definition at line 92 of file CAStarAlgorithm.h.
References mrpt::graphs::CAStarAlgorithm< T >::generateChildren(), mrpt::graphs::CAStarAlgorithm< T >::getTotalCost(), mrpt::graphs::CAStarAlgorithm< T >::isSolutionEnded(), mrpt::graphs::CAStarAlgorithm< T >::isSolutionValid(), mrpt::system::CTicTac::Tac(), and mrpt::system::CTicTac::Tic().
◆ getTotalCost()
|
inlineprivate |
Calculates the total cost (known+estimated) of a solution.
Definition at line 79 of file CAStarAlgorithm.h.
References mrpt::graphs::CAStarAlgorithm< T >::getCost(), and mrpt::graphs::CAStarAlgorithm< T >::getHeuristic().
Referenced by mrpt::graphs::CAStarAlgorithm< T >::getOptimalSolution().
◆ isSolutionEnded()
|
pure virtual |
Client code must implement this method.
Returns true if the given solution is complete.
Implemented in CAStarExample.
Referenced by mrpt::graphs::CAStarAlgorithm< T >::getOptimalSolution().
◆ isSolutionValid()
|
pure virtual |
Client code must implement this method.
Returns true if the given solution is acceptable, that is, doesn't violate the problem logic.
Implemented in CAStarExample.
Referenced by mrpt::graphs::CAStarAlgorithm< T >::getOptimalSolution().