Detailed Description
template<class PARTICLE_TYPE, class MYSELF, mrpt::bayes::particle_storage_mode STORAGE>
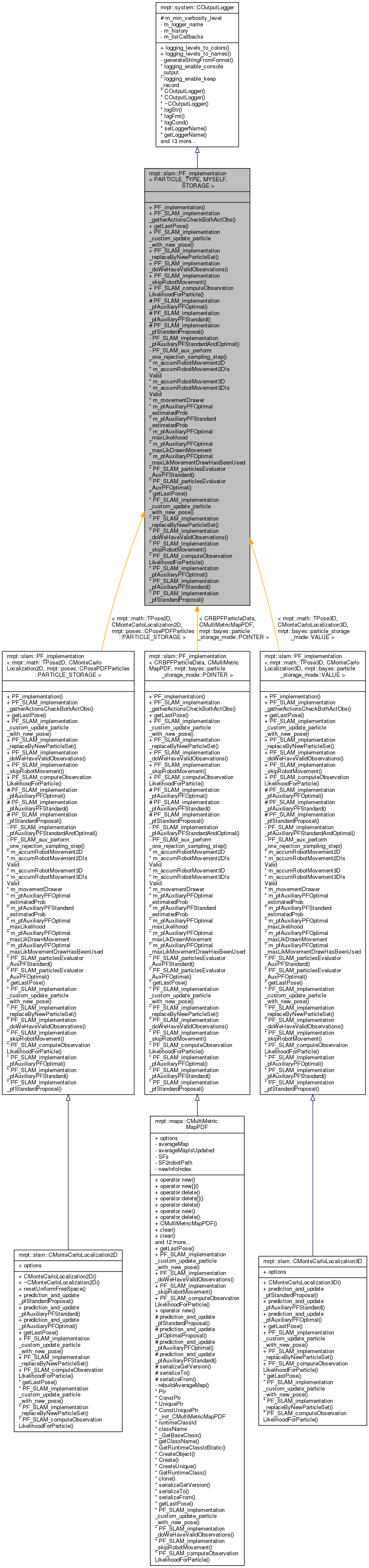
class mrpt::slam::PF_implementation< PARTICLE_TYPE, MYSELF, STORAGE >
A set of common data shared by PF implementations for both SLAM and localization.
Definition at line 38 of file PF_implementations_data.h.
#include <mrpt/slam/PF_implementations_data.h>
Public Member Functions | |
| PF_implementation () | |
| template<class BINTYPE > | |
| bool | PF_SLAM_implementation_gatherActionsCheckBothActObs (const mrpt::obs::CActionCollection *actions, const mrpt::obs::CSensoryFrame *sf) |
| Auxiliary method called by PF implementations: return true if we have both action & observation, otherwise, return false AND accumulate the odometry so when we have an observation we didn't lose a thing. More... | |
Virtual methods that the PF_implementations assume exist. | |
| virtual mrpt::math::TPose3D | getLastPose (const size_t i, bool &is_valid_pose) const =0 |
| Return the last robot pose in the i'th particle; is_valid_pose will be false if there is no such last pose. More... | |
| virtual void | PF_SLAM_implementation_custom_update_particle_with_new_pose (PARTICLE_TYPE *particleData, const mrpt::math::TPose3D &newPose) const =0 |
| virtual void | PF_SLAM_implementation_replaceByNewParticleSet (typename mrpt::bayes::CParticleFilterData< PARTICLE_TYPE, STORAGE >::CParticleList &old_particles, const std::vector< mrpt::math::TPose3D > &newParticles, const std::vector< double > &newParticlesWeight, const std::vector< size_t > &newParticlesDerivedFromIdx) const |
| This is the default algorithm to efficiently replace one old set of samples by another new set. More... | |
| virtual bool | PF_SLAM_implementation_doWeHaveValidObservations (const typename mrpt::bayes::CParticleFilterData< PARTICLE_TYPE, STORAGE >::CParticleList &particles, const mrpt::obs::CSensoryFrame *sf) const |
| virtual bool | PF_SLAM_implementation_skipRobotMovement () const |
| Make a specialization if needed, eg. More... | |
| virtual double | PF_SLAM_computeObservationLikelihoodForParticle (const mrpt::bayes::CParticleFilter::TParticleFilterOptions &PF_options, const size_t particleIndexForMap, const mrpt::obs::CSensoryFrame &observation, const mrpt::poses::CPose3D &x) const =0 |
| Evaluate the observation likelihood for one particle at a given location. More... | |
Static Public Member Functions | |
| static std::array< mrpt::system::TConsoleColor, NUMBER_OF_VERBOSITY_LEVELS > & | logging_levels_to_colors () |
| Map from VerbosityLevels to their corresponding mrpt::system::TConsoleColor. More... | |
| static std::array< std::string, NUMBER_OF_VERBOSITY_LEVELS > & | logging_levels_to_names () |
| Map from VerbosityLevels to their corresponding names. More... | |
Protected Member Functions | |
The generic PF implementations for localization & SLAM. | |
| template<class BINTYPE > | |
| void | PF_SLAM_implementation_pfAuxiliaryPFOptimal (const mrpt::obs::CActionCollection *actions, const mrpt::obs::CSensoryFrame *sf, const mrpt::bayes::CParticleFilter::TParticleFilterOptions &PF_options, const TKLDParams &KLD_options) |
| A generic implementation of the PF method "prediction_and_update_pfAuxiliaryPFOptimal" (optimal sampling with rejection sampling approximation), common to both localization and mapping. More... | |
| template<class BINTYPE > | |
| void | PF_SLAM_implementation_pfAuxiliaryPFStandard (const mrpt::obs::CActionCollection *actions, const mrpt::obs::CSensoryFrame *sf, const mrpt::bayes::CParticleFilter::TParticleFilterOptions &PF_options, const TKLDParams &KLD_options) |
| A generic implementation of the PF method "prediction_and_update_pfAuxiliaryPFStandard" (Auxiliary particle filter with the standard proposal), common to both localization and mapping. More... | |
| template<class BINTYPE > | |
| void | PF_SLAM_implementation_pfStandardProposal (const mrpt::obs::CActionCollection *actions, const mrpt::obs::CSensoryFrame *sf, const mrpt::bayes::CParticleFilter::TParticleFilterOptions &PF_options, const TKLDParams &KLD_options) |
| A generic implementation of the PF method "pfStandardProposal" (standard proposal distribution, that is, a simple SIS particle filter), common to both localization and mapping. More... | |
Protected Attributes | |
| VerbosityLevel | m_min_verbosity_level |
| Provided messages with VerbosityLevel smaller than this value shall be ignored. More... | |
Private Member Functions | |
| template<class BINTYPE > | |
| void | PF_SLAM_implementation_pfAuxiliaryPFStandardAndOptimal (const mrpt::obs::CActionCollection *actions, const mrpt::obs::CSensoryFrame *sf, const mrpt::bayes::CParticleFilter::TParticleFilterOptions &PF_options, const TKLDParams &KLD_options, const bool USE_OPTIMAL_SAMPLING) |
| The shared implementation body of two PF methods: APF and Optimal-APF, depending on USE_OPTIMAL_SAMPLING. More... | |
| template<class BINTYPE > | |
| void | PF_SLAM_aux_perform_one_rejection_sampling_step (const bool USE_OPTIMAL_SAMPLING, const bool doResample, const double maxMeanLik, size_t k, const mrpt::obs::CSensoryFrame *sf, const mrpt::bayes::CParticleFilter::TParticleFilterOptions &PF_options, mrpt::poses::CPose3D &out_newPose, double &out_newParticleLogWeight) |
| std::string | generateStringFromFormat (const char *fmt, va_list argp) const |
| Helper method for generating a std::string instance from printf-like arguments. More... | |
Private Attributes | |
| std::string | m_logger_name |
| std::deque< TMsg > | m_history |
| std::deque< output_logger_callback_t > | m_listCallbacks |
Logging methods | |
| void | logStr (const VerbosityLevel level, const std::string &msg_str) const |
| Main method to add the specified message string to the logger. More... | |
| void | logFmt (const VerbosityLevel level, const char *fmt,...) const MRPT_printf_format_check(3 |
| Alternative logging method, which mimics the printf behavior. More... | |
| void void | logCond (const VerbosityLevel level, bool cond, const std::string &msg_str) const |
| Log the given message only if the condition is satisfied. More... | |
| void | setLoggerName (const std::string &name) |
| Set the name of the COutputLogger instance. More... | |
| std::string | getLoggerName () const |
| Return the name of the COutputLogger instance. More... | |
| void | setMinLoggingLevel (const VerbosityLevel level) |
| Set the minimum logging level for which the incoming logs are going to be taken into account. More... | |
| void | setVerbosityLevel (const VerbosityLevel level) |
| alias of setMinLoggingLevel() More... | |
| VerbosityLevel | getMinLoggingLevel () const |
| bool | isLoggingLevelVisible (VerbosityLevel level) const |
| void | getLogAsString (std::string &log_contents) const |
| Fill the provided string with the contents of the logger's history in std::string representation. More... | |
| std::string | getLogAsString () const |
| Get the history of COutputLogger instance in a string representation. More... | |
| void | writeLogToFile (const std::string *fname_in=NULL) const |
| Write the contents of the COutputLogger instance to an external file. More... | |
| void | dumpLogToConsole () const |
| Dump the current contents of the COutputLogger instance in the terminal window. More... | |
| std::string | getLoggerLastMsg () const |
| Return the last Tmsg instance registered in the logger history. More... | |
| void | getLoggerLastMsg (std::string &msg_str) const |
| Fill inputtted string with the contents of the last message in history. More... | |
| void | loggerReset () |
| Reset the contents of the logger instance. More... | |
| void | logRegisterCallback (output_logger_callback_t userFunc) |
| bool | logDeregisterCallback (output_logger_callback_t userFunc) |
| bool | logging_enable_console_output |
| [Default=true] Set it to false in case you don't want the logged messages to be dumped to the output automatically. More... | |
| bool | logging_enable_keep_record |
| [Default=false] Enables storing all messages into an internal list. More... | |
Constructor & Destructor Documentation
◆ PF_implementation()
|
inline |
Definition at line 41 of file PF_implementations_data.h.
Member Function Documentation
◆ dumpLogToConsole()
|
inherited |
Dump the current contents of the COutputLogger instance in the terminal window.
- See also
- writeToFile
Definition at line 190 of file COutputLogger.cpp.
◆ generateStringFromFormat()
|
privateinherited |
Helper method for generating a std::string instance from printf-like arguments.
Definition at line 110 of file COutputLogger.cpp.
References mrpt::system::os::vsnprintf().
◆ getLastPose()
|
pure virtual |
Return the last robot pose in the i'th particle; is_valid_pose will be false if there is no such last pose.
- Exceptions
-
std::exception on out-of-range particle index
Implemented in mrpt::maps::CMultiMetricMapPDF, mrpt::slam::CMonteCarloLocalization3D, and mrpt::slam::CMonteCarloLocalization2D.
◆ getLogAsString() [1/2]
|
inherited |
Get the history of COutputLogger instance in a string representation.
Definition at line 159 of file COutputLogger.cpp.
Referenced by mrpt::graphslam::deciders::CICPCriteriaNRD< GRAPH_T >::getDescriptiveReport().
◆ getLogAsString() [2/2]
|
inherited |
Fill the provided string with the contents of the logger's history in std::string representation.
Definition at line 154 of file COutputLogger.cpp.
◆ getLoggerLastMsg() [1/2]
|
inherited |
Return the last Tmsg instance registered in the logger history.
Definition at line 195 of file COutputLogger.cpp.
References mrpt::system::COutputLogger::TMsg::getAsString().
◆ getLoggerLastMsg() [2/2]
|
inherited |
Fill inputtted string with the contents of the last message in history.
Definition at line 201 of file COutputLogger.cpp.
◆ getLoggerName()
|
inherited |
Return the name of the COutputLogger instance.
- See also
- setLoggerName
Definition at line 143 of file COutputLogger.cpp.
◆ getMinLoggingLevel()
|
inlineinherited |
- See also
- setMinLoggingLevel
Definition at line 200 of file system/COutputLogger.h.
References mrpt::system::COutputLogger::m_min_verbosity_level.
Referenced by mrpt::maps::CRandomFieldGridMap2D::isEnabledVerbose(), and mrpt::slam::CMetricMapBuilderRBPF::processActionObservation().
◆ isLoggingLevelVisible()
|
inlineinherited |
Definition at line 201 of file system/COutputLogger.h.
References mrpt::system::COutputLogger::m_min_verbosity_level.
Referenced by mrpt::slam::CMetricMapBuilderRBPF::processActionObservation(), and mrpt::system::COutputLoggerStreamWrapper::~COutputLoggerStreamWrapper().
◆ logCond()
|
inherited |
Log the given message only if the condition is satisfied.
- See also
- log, logFmt
Definition at line 131 of file COutputLogger.cpp.
◆ logDeregisterCallback()
|
inherited |
- Returns
- true if an entry was found and deleted.
Definition at line 290 of file COutputLogger.cpp.
References getAddress(), and mrpt::system::COutputLogger::m_listCallbacks.
◆ logFmt()
|
inherited |
Alternative logging method, which mimics the printf behavior.
Handy for not having to first use mrpt::format to pass a std::string message to logStr
Definition at line 91 of file COutputLogger.cpp.
Referenced by mrpt::graphslam::deciders::CICPCriteriaNRD< GRAPH_T >::CICPCriteriaNRD(), mrpt::hmtslam::CTopLCDetector_GridMatching::computeTopologicalObservationModel(), CGraphSlamHandler< GRAPH_T >::execute(), mrpt::math::CLevenbergMarquardtTempl< VECTORTYPE, USERPARAM >::execute(), CGraphSlamHandler< GRAPH_T >::initOutputDir(), CGraphSlamHandler< GRAPH_T >::initVisualization(), mrpt::nav::CNavigatorManualSequence::navigationStep(), mrpt::nav::CAbstractNavigator::performNavigationStepNavigating(), CGraphSlamHandler< GRAPH_T >::readConfigFname(), CGraphSlamHandler< GRAPH_T >::saveResults(), CGraphSlamHandler< GRAPH_T >::setResultsDirName(), mrpt::nav::CReactiveNavigationSystem::STEP1_InitPTGs(), and CGraphSlamHandler< GRAPH_T >::~CGraphSlamHandler().
◆ loggerReset()
|
inherited |
Reset the contents of the logger instance.
Called upon construction.
Definition at line 206 of file COutputLogger.cpp.
References mrpt::system::LVL_INFO.
◆ logging_levels_to_colors()
|
staticinherited |
Map from VerbosityLevels to their corresponding mrpt::system::TConsoleColor.
Handy for coloring the input based on the verbosity of the message
Definition at line 47 of file COutputLogger.cpp.
References logging_levels_to_colors.
Referenced by mrpt::system::COutputLogger::TMsg::dumpToConsole().
◆ logging_levels_to_names()
|
staticinherited |
Map from VerbosityLevels to their corresponding names.
Handy for printing the current message VerbosityLevel along with the actual content
Definition at line 60 of file COutputLogger.cpp.
References logging_levels_to_names.
Referenced by mrpt::system::COutputLogger::TMsg::getAsString().
◆ logRegisterCallback()
|
inherited |
Definition at line 277 of file COutputLogger.cpp.
References mrpt::system::COutputLogger::m_listCallbacks.
◆ logStr()
|
inherited |
Main method to add the specified message string to the logger.
Definition at line 72 of file COutputLogger.cpp.
References mrpt::system::COutputLogger::TMsg::body, mrpt::system::COutputLogger::TMsg::dumpToConsole(), mrpt::system::COutputLogger::TMsg::level, mrpt::system::COutputLogger::TMsg::name, and mrpt::system::COutputLogger::TMsg::timestamp.
Referenced by mrpt::slam::PF_implementation< PARTICLE_TYPE, MYSELF, STORAGE >::PF_SLAM_implementation_pfAuxiliaryPFStandardAndOptimal(), mrpt::nav::CReactiveNavigationSystem::STEP1_InitPTGs(), and mrpt::system::COutputLoggerStreamWrapper::~COutputLoggerStreamWrapper().
◆ PF_SLAM_aux_perform_one_rejection_sampling_step()
|
private |
Definition at line 1018 of file PF_implementations.h.
References mrpt::poses::CPose3D::asTPose(), mrpt::poses::CPose3D::composeFrom(), mrpt::random::CRandomGenerator::drawUniform32bit(), mrpt::random::getRandomGenerator(), mrpt::system::LVL_DEBUG, mrpt::system::LVL_WARN, mrpt::bayes::CParticleFilter::TParticleFilterOptions::max_loglikelihood_dyn_range, min, mrpt::bayes::CParticleFilter::TParticleFilterOptions::pfAuxFilterOptimal_MLE, and mrpt::bayes::CParticleFilter::TParticleFilterOptions::powFactor.
◆ PF_SLAM_computeObservationLikelihoodForParticle()
|
pure virtual |
Evaluate the observation likelihood for one particle at a given location.
Implemented in mrpt::slam::CMonteCarloLocalization2D, mrpt::maps::CMultiMetricMapPDF, and mrpt::slam::CMonteCarloLocalization3D.
◆ PF_SLAM_implementation_custom_update_particle_with_new_pose()
|
pure virtual |
◆ PF_SLAM_implementation_doWeHaveValidObservations()
|
inlinevirtual |
Definition at line 267 of file PF_implementations_data.h.
References MRPT_UNUSED_PARAM.
◆ PF_SLAM_implementation_pfAuxiliaryPFOptimal()
|
protected |
A generic implementation of the PF method "prediction_and_update_pfAuxiliaryPFOptimal" (optimal sampling with rejection sampling approximation), common to both localization and mapping.
BINTYPE: TPoseBin or whatever to discretize the sample space for KLD-sampling.
This method implements optimal sampling with a rejection sampling-based approximation of the true posterior. For details, see the papers:
J.L. Blanco, J. Gonzalez, and J.-A. Fernandez-Madrigal, "An Optimal Filtering Algorithm for Non-Parametric Observation Models in Robot Localization," in Proc. IEEE International Conference on Robotics and Automation (ICRA'08), 2008, pp. 461-466.
BINTYPE: TPoseBin or whatever to discretize the sample space for KLD-sampling.
This method implements optimal sampling with a rejection sampling-based approximation of the true posterior. For details, see the papers:
J.-L. Blanco, J. Gonzalez, and J.-A. Fernandez-Madrigal, "An Optimal Filtering Algorithm for Non-Parametric Observation Models in Robot Localization," in Proc. IEEE International Conference on Robotics and Automation (ICRA'08), 2008, pp. 461466.
Definition at line 155 of file PF_implementations.h.
◆ PF_SLAM_implementation_pfAuxiliaryPFStandard()
|
protected |
A generic implementation of the PF method "prediction_and_update_pfAuxiliaryPFStandard" (Auxiliary particle filter with the standard proposal), common to both localization and mapping.
BINTYPE: TPoseBin or whatever to discretize the sample space for KLD-sampling.
This method is described in the paper: Pitt, M.K.; Shephard, N. (1999). "Filtering Via Simulation: Auxiliary Particle Filters". Journal of the American Statistical Association 94 (446): 590-591. doi:10.2307/2670179.
Definition at line 400 of file PF_implementations.h.
◆ PF_SLAM_implementation_pfAuxiliaryPFStandardAndOptimal()
|
private |
The shared implementation body of two PF methods: APF and Optimal-APF, depending on USE_OPTIMAL_SAMPLING.
Definition at line 600 of file PF_implementations.h.
References mrpt::bayes::CParticleFilter::TParticleFilterOptions::adaptiveSampleSize, ASSERT_, mrpt::poses::CPose3D::asTPose(), mrpt::bayes::CParticleFilter::TParticleFilterOptions::BETA, mrpt::math::chi2inv(), mrpt::math::distance(), mrpt::random::CRandomGenerator::drawUniform32bit(), mrpt::containers::find(), mrpt::format(), mrpt::random::getRandomGenerator(), INVALID_LIKELIHOOD_VALUE, mrpt::slam::TKLDParams::KLD_delta, mrpt::slam::TKLDParams::KLD_epsilon, mrpt::slam::TKLDParams::KLD_maxSampleSize, mrpt::slam::TKLDParams::KLD_minSampleSize, mrpt::slam::TKLDParams::KLD_minSamplesPerBin, mrpt::system::COutputLogger::logStr(), mrpt::system::LVL_DEBUG, mrpt::math::maximum(), mrpt::math::mean(), mrpt::math::minimum(), MRPT_END, MRPT_START, mrpt::bayes::CParticleFilter::TParticleFilterOptions::pfAuxFilterOptimal_MLE, mrpt::bayes::POINTER, mrpt::round(), and mrpt::random::shuffle().
◆ PF_SLAM_implementation_pfStandardProposal()
|
protected |
A generic implementation of the PF method "pfStandardProposal" (standard proposal distribution, that is, a simple SIS particle filter), common to both localization and mapping.
- BINTYPE: TPoseBin or whatever to discretize the sample space for KLD-sampling.
Definition at line 178 of file PF_implementations.h.
References mrpt::bayes::CParticleFilter::TParticleFilterOptions::adaptiveSampleSize, ASSERT_, mrpt::poses::CPose3D::asTPose(), mrpt::obs::CActionCollection::getActionByClass(), mrpt::obs::CActionCollection::getBestMovementEstimation(), mrpt::poses::CPose3DPDFGaussian::getMean(), mrpt::slam::TKLDParams::KLD_delta, mrpt::slam::TKLDParams::KLD_epsilon, mrpt::slam::TKLDParams::KLD_minSampleSize, MRPT_START, mrpt::bayes::POINTER, mrpt::obs::CActionRobotMovement3D::poseChange, and THROW_EXCEPTION.
◆ PF_SLAM_implementation_replaceByNewParticleSet()
|
inlinevirtual |
This is the default algorithm to efficiently replace one old set of samples by another new set.
The method uses pointers to make fast copies the first time each particle is duplicated, then makes real copies for the next ones.
Note that more efficient specializations might exist for specific particle data structs.
Definition at line 183 of file PF_implementations_data.h.
References ASSERT_, mrpt::slam::PF_implementation< PARTICLE_TYPE, MYSELF, STORAGE >::PF_SLAM_implementation_custom_update_particle_with_new_pose(), and mrpt::bayes::POINTER.
◆ PF_SLAM_implementation_skipRobotMovement()
|
inlinevirtual |
Make a specialization if needed, eg.
in the first step in SLAM.
Reimplemented in mrpt::maps::CMultiMetricMapPDF.
Definition at line 278 of file PF_implementations_data.h.
◆ PF_SLAM_particlesEvaluator_AuxPFOptimal()
|
staticprotected |
Definition at line 419 of file PF_implementations.h.
References ASSERT_, mrpt::poses::CPose3D::asTPose(), mrpt::math::averageLogLikelihood(), MRPT_CHECK_NORMAL_NUMBER, MRPT_END, MRPT_START, MRPT_UNUSED_PARAM, mrpt::bayes::CParticleFilter::TParticleFilterOptions::pfAuxFilterOptimal_MaximumSearchSamples, and mrpt::bayes::CParticleFilter::TParticleFilterOptions::pfAuxFilterOptimal_MLE.
◆ PF_SLAM_particlesEvaluator_AuxPFStandard()
|
staticprotected |
Compute w[i]*p(z_t | mu_t^i), with mu_t^i being the mean of the new robot pose.
- Parameters
-
action MUST be a "const CPose3D*" observation MUST be a "const CSensoryFrame*" action MUST be a "const mrpt::poses::CPose3D*" observation MUST be a "const CSensoryFrame*"
Definition at line 498 of file PF_implementations.h.
References ASSERT_, mrpt::poses::CPose3D::asTPose(), mrpt::math::averageLogLikelihood(), mrpt::poses::CPose3D::composeFrom(), MRPT_CHECK_NORMAL_NUMBER, MRPT_END, MRPT_START, mrpt::bayes::CParticleFilter::TParticleFilterOptions::pfAuxFilterOptimal_MaximumSearchSamples, mrpt::bayes::CParticleFilter::TParticleFilterOptions::pfAuxFilterOptimal_MLE, and mrpt::bayes::CParticleFilter::TParticleFilterOptions::pfAuxFilterStandard_FirstStageWeightsMonteCarlo.
◆ setLoggerName()
|
inherited |
Set the name of the COutputLogger instance.
- See also
- getLoggerName
Definition at line 138 of file COutputLogger.cpp.
Referenced by mrpt::slam::CMetricMapBuilderICP::CMetricMapBuilderICP(), mrpt::slam::CMetricMapBuilderRBPF::CMetricMapBuilderRBPF(), mrpt::slam::CMonteCarloLocalization2D::CMonteCarloLocalization2D(), mrpt::slam::CMonteCarloLocalization3D::CMonteCarloLocalization3D(), and mrpt::graphslam::CWindowManager::initCWindowManager().
◆ setMinLoggingLevel()
|
inherited |
Set the minimum logging level for which the incoming logs are going to be taken into account.
String messages with specified VerbosityLevel smaller than the min, will not be outputted to the screen and neither will a record of them be stored in by the COutputLogger instance
Definition at line 144 of file COutputLogger.cpp.
Referenced by mrpt::maps::CRandomFieldGridMap2D::enableVerbose(), mrpt::math::CLevenbergMarquardtTempl< VECTORTYPE, USERPARAM >::execute(), mrpt::hwdrivers::CHokuyoURG::initialize(), and mrpt::graphslam::deciders::CICPCriteriaNRD< GRAPH_T >::loadParams().
◆ setVerbosityLevel()
|
inherited |
alias of setMinLoggingLevel()
Definition at line 149 of file COutputLogger.cpp.
Referenced by mrpt::nav::CAbstractNavigator::CAbstractNavigator(), mrpt::slam::CMetricMapBuilderRBPF::CMetricMapBuilderRBPF(), mrpt::comms::CServerTCPSocket::CServerTCPSocket(), mrpt::slam::CMetricMapBuilderRBPF::processActionObservation(), and mrpt::math::ransac_detect_2D_lines().
◆ writeLogToFile()
|
inherited |
Write the contents of the COutputLogger instance to an external file.
Upon call to this method, COutputLogger dumps the contents of all the logged commands so far to the specified external file. By default the filename is set to ${LOGGERNAME}.log except if the fname parameter is provided
- See also
- dumpToConsole, getAsString
Definition at line 165 of file COutputLogger.cpp.
References ASSERTMSG_, and mrpt::format().
Member Data Documentation
◆ logging_enable_console_output
|
inherited |
[Default=true] Set it to false in case you don't want the logged messages to be dumped to the output automatically.
Definition at line 239 of file system/COutputLogger.h.
◆ logging_enable_keep_record
|
inherited |
[Default=false] Enables storing all messages into an internal list.
- See also
- writeLogToFile, getLogAsString
Definition at line 242 of file system/COutputLogger.h.
◆ m_accumRobotMovement2D
|
protected |
Definition at line 52 of file PF_implementations_data.h.
◆ m_accumRobotMovement2DIsValid
|
protected |
Definition at line 53 of file PF_implementations_data.h.
◆ m_accumRobotMovement3D
|
protected |
Definition at line 54 of file PF_implementations_data.h.
◆ m_accumRobotMovement3DIsValid
|
protected |
Definition at line 55 of file PF_implementations_data.h.
◆ m_history
|
mutableprivateinherited |
Definition at line 310 of file system/COutputLogger.h.
◆ m_listCallbacks
|
privateinherited |
Definition at line 312 of file system/COutputLogger.h.
Referenced by mrpt::system::COutputLogger::logDeregisterCallback(), and mrpt::system::COutputLogger::logRegisterCallback().
◆ m_logger_name
|
privateinherited |
Definition at line 308 of file system/COutputLogger.h.
◆ m_min_verbosity_level
|
protectedinherited |
Provided messages with VerbosityLevel smaller than this value shall be ignored.
Definition at line 252 of file system/COutputLogger.h.
Referenced by mrpt::system::COutputLogger::getMinLoggingLevel(), and mrpt::system::COutputLogger::isLoggingLevelVisible().
◆ m_movementDrawer
|
protected |
Used in al PF implementations.
Definition at line 59 of file PF_implementations_data.h.
◆ m_pfAuxiliaryPFOptimal_estimatedProb
|
mutableprotected |
Auxiliary variable used in the "pfAuxiliaryPFOptimal" algorithm.
Definition at line 61 of file PF_implementations_data.h.
◆ m_pfAuxiliaryPFOptimal_maxLikDrawnMovement
|
mutableprotected |
Auxiliary variable used in the "pfAuxiliaryPFOptimal" algorithm.
Definition at line 68 of file PF_implementations_data.h.
◆ m_pfAuxiliaryPFOptimal_maxLikelihood
|
mutableprotected |
Auxiliary variable used in the "pfAuxiliaryPFOptimal" algorithm.
Definition at line 65 of file PF_implementations_data.h.
◆ m_pfAuxiliaryPFOptimal_maxLikMovementDrawHasBeenUsed
|
protected |
Definition at line 69 of file PF_implementations_data.h.
◆ m_pfAuxiliaryPFStandard_estimatedProb
|
mutableprotected |
Auxiliary variable used in the "pfAuxiliaryPFStandard" algorithm.
Definition at line 63 of file PF_implementations_data.h.