Detailed Description
Parameters common to any derived class.
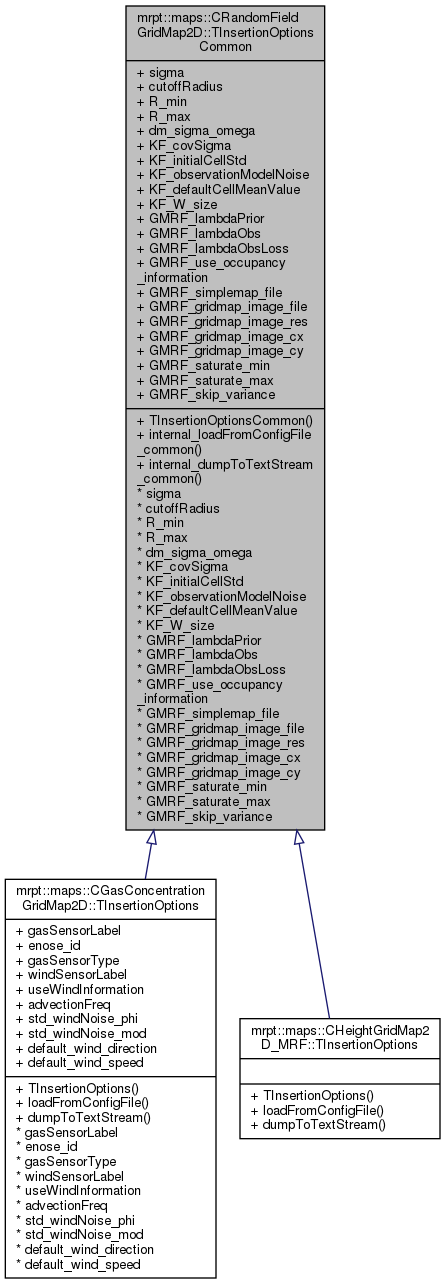
Derived classes should derive a new struct from this one, plus "public utils::CLoadableOptions", and call the internal_* methods where appropiate to deal with the variables declared here. Derived classes instantions of their "TInsertionOptions" MUST set the pointer "m_insertOptions_common" upon construction.
Definition at line 240 of file CRandomFieldGridMap2D.h.
#include <mrpt/maps/CRandomFieldGridMap2D.h>
Public Member Functions | |
| TInsertionOptionsCommon () | |
| Default values loader. More... | |
| void | internal_loadFromConfigFile_common (const mrpt::config::CConfigFileBase &source, const std::string §ion) |
| See utils::CLoadableOptions. More... | |
| void | internal_dumpToTextStream_common (std::ostream &out) const |
| See utils::CLoadableOptions. More... | |
Public Attributes | |
Kernel methods (mrKernelDM, mrKernelDMV) | |
| float | sigma |
| The sigma of the "Parzen"-kernel Gaussian. More... | |
| float | cutoffRadius |
| The cutoff radius for updating cells. More... | |
| float | R_min |
| Limits for normalization of sensor readings. More... | |
| float | R_max |
| double | dm_sigma_omega |
| [DM/DM+V methods] The scaling parameter for the confidence "alpha" values (see the IROS 2009 paper; see CRandomFieldGridMap2D) More... | |
Kalman-filter methods (mrKalmanFilter, mrKalmanApproximate) | |
| float | KF_covSigma |
| The "sigma" for the initial covariance value between cells (in meters). More... | |
| float | KF_initialCellStd |
| The initial standard deviation of each cell's concentration (will be stored both at each cell's structure and in the covariance matrix as variances in the diagonal) (in normalized concentration units). More... | |
| float | KF_observationModelNoise |
| The sensor model noise (in normalized concentration units). More... | |
| float | KF_defaultCellMeanValue |
| The default value for the mean of cells' concentration. More... | |
| uint16_t | KF_W_size |
| [mrKalmanApproximate] The size of the window of neighbor cells. More... | |
Gaussian Markov Random Fields methods (mrGMRF_SD) | |
| double | GMRF_lambdaPrior |
| The information (Lambda) of fixed map constraints. More... | |
| double | GMRF_lambdaObs |
| The initial information (Lambda) of each observation (this information will decrease with time) More... | |
| double | GMRF_lambdaObsLoss |
| The loss of information of the observations with each iteration. More... | |
| bool | GMRF_use_occupancy_information |
| whether to use information of an occupancy_gridmap map for building the GMRF More... | |
| std::string | GMRF_simplemap_file |
| simplemap_file name of the occupancy_gridmap More... | |
| std::string | GMRF_gridmap_image_file |
| image name of the occupancy_gridmap More... | |
| double | GMRF_gridmap_image_res |
| occupancy_gridmap resolution: size of each pixel (m) More... | |
| size_t | GMRF_gridmap_image_cx |
| Pixel coordinates of the origin for the occupancy_gridmap. More... | |
| size_t | GMRF_gridmap_image_cy |
| Pixel coordinates of the origin for the occupancy_gridmap. More... | |
| double | GMRF_saturate_min |
| (Default:-inf,+inf) Saturate the estimated mean in these limits More... | |
| double | GMRF_saturate_max |
| bool | GMRF_skip_variance |
| (Default:false) Skip the computation of the variance, just compute the mean More... | |
Constructor & Destructor Documentation
◆ TInsertionOptionsCommon()
| CRandomFieldGridMap2D::TInsertionOptionsCommon::TInsertionOptionsCommon | ( | ) |
Default values loader.
The loss of information of the observations with each iteration.
Definition at line 678 of file CRandomFieldGridMap2D.cpp.
Member Function Documentation
◆ internal_dumpToTextStream_common()
| void CRandomFieldGridMap2D::TInsertionOptionsCommon::internal_dumpToTextStream_common | ( | std::ostream & | out | ) | const |
Definition at line 717 of file CRandomFieldGridMap2D.cpp.
References mrpt::format().
◆ internal_loadFromConfigFile_common()
| void CRandomFieldGridMap2D::TInsertionOptionsCommon::internal_loadFromConfigFile_common | ( | const mrpt::config::CConfigFileBase & | source, |
| const std::string & | section | ||
| ) |
Definition at line 774 of file CRandomFieldGridMap2D.cpp.
References iniFile(), and MRPT_LOAD_CONFIG_VAR.
Member Data Documentation
◆ cutoffRadius
| float mrpt::maps::CRandomFieldGridMap2D::TInsertionOptionsCommon::cutoffRadius |
The cutoff radius for updating cells.
Definition at line 258 of file CRandomFieldGridMap2D.h.
Referenced by mrpt::maps::CGasConcentrationGridMap2D::serializeFrom(), and mrpt::maps::CGasConcentrationGridMap2D::serializeTo().
◆ dm_sigma_omega
| double mrpt::maps::CRandomFieldGridMap2D::TInsertionOptionsCommon::dm_sigma_omega |
[DM/DM+V methods] The scaling parameter for the confidence "alpha" values (see the IROS 2009 paper; see CRandomFieldGridMap2D)
Definition at line 263 of file CRandomFieldGridMap2D.h.
Referenced by mrpt::maps::CRandomFieldGridMap2D::computeConfidenceCellValue_DM_DMV(), mrpt::maps::CRandomFieldGridMap2D::computeMeanCellValue_DM_DMV(), and mrpt::maps::CRandomFieldGridMap2D::computeVarCellValue_DM_DMV().
◆ GMRF_gridmap_image_cx
| size_t mrpt::maps::CRandomFieldGridMap2D::TInsertionOptionsCommon::GMRF_gridmap_image_cx |
Pixel coordinates of the origin for the occupancy_gridmap.
Definition at line 303 of file CRandomFieldGridMap2D.h.
◆ GMRF_gridmap_image_cy
| size_t mrpt::maps::CRandomFieldGridMap2D::TInsertionOptionsCommon::GMRF_gridmap_image_cy |
Pixel coordinates of the origin for the occupancy_gridmap.
Definition at line 305 of file CRandomFieldGridMap2D.h.
◆ GMRF_gridmap_image_file
| std::string mrpt::maps::CRandomFieldGridMap2D::TInsertionOptionsCommon::GMRF_gridmap_image_file |
image name of the occupancy_gridmap
Definition at line 299 of file CRandomFieldGridMap2D.h.
◆ GMRF_gridmap_image_res
| double mrpt::maps::CRandomFieldGridMap2D::TInsertionOptionsCommon::GMRF_gridmap_image_res |
occupancy_gridmap resolution: size of each pixel (m)
Definition at line 301 of file CRandomFieldGridMap2D.h.
◆ GMRF_lambdaObs
| double mrpt::maps::CRandomFieldGridMap2D::TInsertionOptionsCommon::GMRF_lambdaObs |
The initial information (Lambda) of each observation (this information will decrease with time)
Definition at line 289 of file CRandomFieldGridMap2D.h.
◆ GMRF_lambdaObsLoss
| double mrpt::maps::CRandomFieldGridMap2D::TInsertionOptionsCommon::GMRF_lambdaObsLoss |
The loss of information of the observations with each iteration.
Definition at line 291 of file CRandomFieldGridMap2D.h.
Referenced by mrpt::maps::CRandomFieldGridMap2D::updateMapEstimation_GMRF().
◆ GMRF_lambdaPrior
| double mrpt::maps::CRandomFieldGridMap2D::TInsertionOptionsCommon::GMRF_lambdaPrior |
The information (Lambda) of fixed map constraints.
Definition at line 286 of file CRandomFieldGridMap2D.h.
◆ GMRF_saturate_max
| double mrpt::maps::CRandomFieldGridMap2D::TInsertionOptionsCommon::GMRF_saturate_max |
◆ GMRF_saturate_min
| double mrpt::maps::CRandomFieldGridMap2D::TInsertionOptionsCommon::GMRF_saturate_min |
(Default:-inf,+inf) Saturate the estimated mean in these limits
Definition at line 308 of file CRandomFieldGridMap2D.h.
Referenced by mrpt::maps::CRandomFieldGridMap2D::getAs3DObject(), mrpt::maps::CRandomFieldGridMap2D::getAsMatrix(), mrpt::maps::CRandomFieldGridMap2D::saveAsMatlab3DGraph(), and mrpt::maps::CRandomFieldGridMap2D::updateMapEstimation_GMRF().
◆ GMRF_simplemap_file
| std::string mrpt::maps::CRandomFieldGridMap2D::TInsertionOptionsCommon::GMRF_simplemap_file |
simplemap_file name of the occupancy_gridmap
Definition at line 297 of file CRandomFieldGridMap2D.h.
◆ GMRF_skip_variance
| bool mrpt::maps::CRandomFieldGridMap2D::TInsertionOptionsCommon::GMRF_skip_variance |
(Default:false) Skip the computation of the variance, just compute the mean
Definition at line 311 of file CRandomFieldGridMap2D.h.
Referenced by mrpt::maps::CRandomFieldGridMap2D::updateMapEstimation_GMRF().
◆ GMRF_use_occupancy_information
| bool mrpt::maps::CRandomFieldGridMap2D::TInsertionOptionsCommon::GMRF_use_occupancy_information |
whether to use information of an occupancy_gridmap map for building the GMRF
Definition at line 295 of file CRandomFieldGridMap2D.h.
◆ KF_covSigma
| float mrpt::maps::CRandomFieldGridMap2D::TInsertionOptionsCommon::KF_covSigma |
The "sigma" for the initial covariance value between cells (in meters).
Definition at line 270 of file CRandomFieldGridMap2D.h.
Referenced by mrpt::maps::CRandomFieldGridMap2D::insertObservation_KF2(), mrpt::maps::CRandomFieldGridMap2D::resize(), mrpt::maps::CGasConcentrationGridMap2D::serializeFrom(), and mrpt::maps::CGasConcentrationGridMap2D::serializeTo().
◆ KF_defaultCellMeanValue
| float mrpt::maps::CRandomFieldGridMap2D::TInsertionOptionsCommon::KF_defaultCellMeanValue |
The default value for the mean of cells' concentration.
Definition at line 278 of file CRandomFieldGridMap2D.h.
Referenced by mrpt::maps::CRandomFieldGridMap2D::insertObservation_KF(), mrpt::maps::CRandomFieldGridMap2D::insertObservation_KF2(), mrpt::maps::CRandomFieldGridMap2D::predictMeasurement(), mrpt::maps::CGasConcentrationGridMap2D::serializeFrom(), and mrpt::maps::CGasConcentrationGridMap2D::serializeTo().
◆ KF_initialCellStd
| float mrpt::maps::CRandomFieldGridMap2D::TInsertionOptionsCommon::KF_initialCellStd |
The initial standard deviation of each cell's concentration (will be stored both at each cell's structure and in the covariance matrix as variances in the diagonal) (in normalized concentration units).
Definition at line 274 of file CRandomFieldGridMap2D.h.
Referenced by mrpt::maps::CRandomFieldGridMap2D::insertObservation_KF(), mrpt::maps::CRandomFieldGridMap2D::predictMeasurement(), mrpt::maps::CRandomFieldGridMap2D::resize(), mrpt::maps::CGasConcentrationGridMap2D::serializeFrom(), mrpt::maps::CGasConcentrationGridMap2D::serializeTo(), and mrpt::maps::CGasConcentrationGridMap2D::simulateAdvection().
◆ KF_observationModelNoise
| float mrpt::maps::CRandomFieldGridMap2D::TInsertionOptionsCommon::KF_observationModelNoise |
The sensor model noise (in normalized concentration units).
Definition at line 276 of file CRandomFieldGridMap2D.h.
Referenced by mrpt::maps::CRandomFieldGridMap2D::insertObservation_KF2(), mrpt::maps::CRandomFieldGridMap2D::predictMeasurement(), mrpt::maps::CGasConcentrationGridMap2D::serializeFrom(), and mrpt::maps::CGasConcentrationGridMap2D::serializeTo().
◆ KF_W_size
| uint16_t mrpt::maps::CRandomFieldGridMap2D::TInsertionOptionsCommon::KF_W_size |
[mrKalmanApproximate] The size of the window of neighbor cells.
Definition at line 280 of file CRandomFieldGridMap2D.h.
Referenced by mrpt::maps::CRandomFieldGridMap2D::insertObservation_KF2(), mrpt::maps::CRandomFieldGridMap2D::resize(), mrpt::maps::CGasConcentrationGridMap2D::serializeFrom(), and mrpt::maps::CGasConcentrationGridMap2D::serializeTo().
◆ R_max
| float mrpt::maps::CRandomFieldGridMap2D::TInsertionOptionsCommon::R_max |
Definition at line 260 of file CRandomFieldGridMap2D.h.
Referenced by mrpt::maps::CGasConcentrationGridMap2D::internal_insertObservation(), mrpt::maps::CRandomFieldGridMap2D::predictMeasurement(), mrpt::maps::CGasConcentrationGridMap2D::serializeFrom(), and mrpt::maps::CGasConcentrationGridMap2D::serializeTo().
◆ R_min
| float mrpt::maps::CRandomFieldGridMap2D::TInsertionOptionsCommon::R_min |
Limits for normalization of sensor readings.
Definition at line 260 of file CRandomFieldGridMap2D.h.
Referenced by mrpt::maps::CGasConcentrationGridMap2D::internal_insertObservation(), mrpt::maps::CRandomFieldGridMap2D::predictMeasurement(), mrpt::maps::CGasConcentrationGridMap2D::serializeFrom(), and mrpt::maps::CGasConcentrationGridMap2D::serializeTo().
◆ sigma
| float mrpt::maps::CRandomFieldGridMap2D::TInsertionOptionsCommon::sigma |
The sigma of the "Parzen"-kernel Gaussian.
Definition at line 256 of file CRandomFieldGridMap2D.h.
Referenced by mrpt::maps::CGasConcentrationGridMap2D::serializeFrom(), and mrpt::maps::CGasConcentrationGridMap2D::serializeTo().