Detailed Description
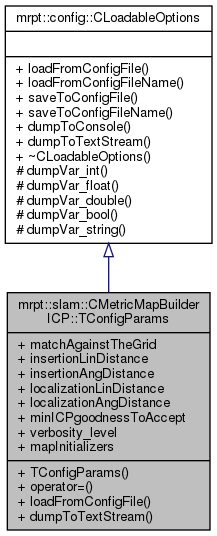
Algorithm configuration params.
Definition at line 39 of file CMetricMapBuilderICP.h.
#include <mrpt/slam/CMetricMapBuilderICP.h>
Public Member Functions | |
| TConfigParams (mrpt::system::VerbosityLevel &parent_verbosity_level) | |
| Initializer. More... | |
| TConfigParams & | operator= (const TConfigParams &other) |
| void | loadFromConfigFile (const mrpt::config::CConfigFileBase &source, const std::string §ion) override |
| This method load the options from a ".ini"-like file or memory-stored string list. More... | |
| void | dumpToTextStream (std::ostream &out) const override |
| This method should clearly display all the contents of the structure in textual form, sending it to a std::ostream. More... | |
| void | loadFromConfigFileName (const std::string &config_file, const std::string §ion) |
| Behaves like loadFromConfigFile, but you can pass directly a file name and a temporary CConfigFile object will be created automatically to load the file. More... | |
| virtual void | saveToConfigFile (mrpt::config::CConfigFileBase &target, const std::string §ion) const |
| This method saves the options to a ".ini"-like file or memory-stored string list. More... | |
| void | saveToConfigFileName (const std::string &config_file, const std::string §ion) const |
| Behaves like saveToConfigFile, but you can pass directly a file name and a temporary CConfigFile object will be created automatically to save the file. More... | |
| void | dumpToConsole () const |
| Just like dumpToTextStream() but sending the text to the console (std::cout) More... | |
Public Attributes | |
| bool | matchAgainstTheGrid |
| (default:false) Match against the occupancy grid or the points map? The former is quicker but less precise. More... | |
| double | insertionLinDistance |
| Minimum robot linear (m) displacement for a new observation to be inserted in the map. More... | |
| double | insertionAngDistance |
| Minimum robot angular (rad, deg when loaded from the .ini) displacement for a new observation to be inserted in the map. More... | |
| double | localizationLinDistance |
| Minimum robot linear (m) displacement for a new observation to be used to do ICP-based localization (otherwise, dead-reckon with odometry). More... | |
| double | localizationAngDistance |
| Minimum robot angular (rad, deg when loaded from the .ini) displacement for a new observation to be used to do ICP-based localization (otherwise, dead-reckon with odometry). More... | |
| double | minICPgoodnessToAccept |
| Minimum ICP goodness (0,1) to accept the resulting corrected position (default: 0.40) More... | |
| mrpt::system::VerbosityLevel & | verbosity_level |
| mrpt::maps::TSetOfMetricMapInitializers | mapInitializers |
| What maps to create (at least one points map and/or a grid map are needed). More... | |
Static Protected Member Functions | |
| static void | dumpVar_int (std::ostream &out, const char *varName, int v) |
| Used to print variable info from dumpToTextStream with the macro LOADABLEOPTS_DUMP_VAR. More... | |
| static void | dumpVar_float (std::ostream &out, const char *varName, float v) |
| static void | dumpVar_double (std::ostream &out, const char *varName, double v) |
| static void | dumpVar_bool (std::ostream &out, const char *varName, bool v) |
| static void | dumpVar_string (std::ostream &out, const char *varName, const std::string &v) |
Constructor & Destructor Documentation
◆ TConfigParams()
| CMetricMapBuilderICP::TConfigParams::TConfigParams | ( | mrpt::system::VerbosityLevel & | parent_verbosity_level | ) |
Initializer.
Definition at line 53 of file CMetricMapBuilderICP.cpp.
Member Function Documentation
◆ dumpToConsole()
|
inherited |
Just like dumpToTextStream() but sending the text to the console (std::cout)
Definition at line 44 of file CLoadableOptions.cpp.
References mrpt::config::CLoadableOptions::dumpToTextStream().
Referenced by mrpt::hmtslam::CTopLCDetector_GridMatching::computeTopologicalObservationModel().
◆ dumpToTextStream()
|
overridevirtual |
This method should clearly display all the contents of the structure in textual form, sending it to a std::ostream.
The default implementation in this base class relies on saveToConfigFile() to generate a plain text representation of all the parameters.
Reimplemented from mrpt::config::CLoadableOptions.
Definition at line 97 of file CMetricMapBuilderICP.cpp.
References mrpt::format(), and mrpt::RAD2DEG().
◆ dumpVar_bool()
|
staticprotectedinherited |
Definition at line 63 of file CLoadableOptions.cpp.
References mrpt::format(), and LOADABLEOPTS_COLUMN_WIDTH.
◆ dumpVar_double()
|
staticprotectedinherited |
Definition at line 57 of file CLoadableOptions.cpp.
References mrpt::format(), and LOADABLEOPTS_COLUMN_WIDTH.
◆ dumpVar_float()
|
staticprotectedinherited |
Definition at line 51 of file CLoadableOptions.cpp.
References mrpt::format(), and LOADABLEOPTS_COLUMN_WIDTH.
◆ dumpVar_int()
|
staticprotectedinherited |
Used to print variable info from dumpToTextStream with the macro LOADABLEOPTS_DUMP_VAR.
Definition at line 45 of file CLoadableOptions.cpp.
References mrpt::format(), and LOADABLEOPTS_COLUMN_WIDTH.
◆ dumpVar_string()
|
staticprotectedinherited |
Definition at line 70 of file CLoadableOptions.cpp.
References mrpt::format(), and LOADABLEOPTS_COLUMN_WIDTH.
◆ loadFromConfigFile()
|
overridevirtual |
This method load the options from a ".ini"-like file or memory-stored string list.
Only those parameters found in the given "section" and having the same name that the variable are loaded. Those not found in the file will stay with their previous values (usually the default values loaded at initialization). An example of an ".ini" file:
- See also
- loadFromConfigFileName, saveToConfigFile
Implements mrpt::config::CLoadableOptions.
Definition at line 81 of file CMetricMapBuilderICP.cpp.
References MRPT_LOAD_CONFIG_VAR, and MRPT_LOAD_CONFIG_VAR_DEGREES.
◆ loadFromConfigFileName()
|
inherited |
Behaves like loadFromConfigFile, but you can pass directly a file name and a temporary CConfigFile object will be created automatically to load the file.
- See also
- loadFromConfigFile
Definition at line 22 of file CLoadableOptions.cpp.
References mrpt::config::CLoadableOptions::loadFromConfigFile().
◆ operator=()
| CMetricMapBuilderICP::TConfigParams & CMetricMapBuilderICP::TConfigParams::operator= | ( | const TConfigParams & | other | ) |
Definition at line 67 of file CMetricMapBuilderICP.cpp.
References insertionAngDistance, insertionLinDistance, localizationAngDistance, localizationLinDistance, mapInitializers, matchAgainstTheGrid, and minICPgoodnessToAccept.
◆ saveToConfigFile()
|
virtualinherited |
This method saves the options to a ".ini"-like file or memory-stored string list.
- See also
- loadFromConfigFile, saveToConfigFileName
Reimplemented in mrpt::vision::TMultiResDescOptions, mrpt::vision::TMultiResDescMatchOptions, mrpt::nav::CPTG_RobotShape_Circular, mrpt::nav::CPTG_RobotShape_Polygonal, mrpt::nav::CParameterizedTrajectoryGenerator, mrpt::maps::TSetOfMetricMapInitializers, mrpt::nav::CAbstractPTGBasedReactive::TAbstractPTGNavigatorParams, mrpt::nav::CAbstractNavigator::TAbstractNavigatorParams, mrpt::nav::CPTG_DiffDrive_CollisionGridBased, mrpt::nav::CWaypointsNavigator::TWaypointsNavigatorParams, mrpt::nav::CHolonomicFullEval::TOptions, mrpt::bayes::CParticleFilter::TParticleFilterOptions, mrpt::nav::CReactiveNavigationSystem::TReactiveNavigatorParams, mrpt::nav::CHolonomicND::TOptions, mrpt::maps::TMapGenericParams, mrpt::nav::CMultiObjectiveMotionOptimizerBase::TParamsBase, mrpt::nav::CHolonomicVFF::TOptions, mrpt::slam::CICP::TConfigParams, mrpt::slam::CIncrementalMapPartitioner::TOptions, mrpt::maps::CPointCloudFilterByDistance::TOptions, mrpt::nav::CPTG_DiffDrive_C, mrpt::maps::TMetricMapInitializer, mrpt::nav::CPTG_DiffDrive_alpha, mrpt::nav::CMultiObjMotionOpt_Scalarization::TParams, mrpt::nav::CPTG_DiffDrive_CC, mrpt::nav::CPTG_DiffDrive_CCS, mrpt::nav::CPTG_DiffDrive_CS, and mrpt::nav::CPTG_Holo_Blend.
Definition at line 29 of file CLoadableOptions.cpp.
References MRPT_UNUSED_PARAM.
Referenced by mrpt::config::CLoadableOptions::dumpToTextStream(), and mrpt::config::CLoadableOptions::saveToConfigFileName().
◆ saveToConfigFileName()
|
inherited |
Behaves like saveToConfigFile, but you can pass directly a file name and a temporary CConfigFile object will be created automatically to save the file.
- See also
- saveToConfigFile, loadFromConfigFileName
Definition at line 37 of file CLoadableOptions.cpp.
References mrpt::config::CLoadableOptions::saveToConfigFile().
Member Data Documentation
◆ insertionAngDistance
| double mrpt::slam::CMetricMapBuilderICP::TConfigParams::insertionAngDistance |
Minimum robot angular (rad, deg when loaded from the .ini) displacement for a new observation to be inserted in the map.
Definition at line 60 of file CMetricMapBuilderICP.h.
Referenced by operator=(), and mrpt::slam::CMetricMapBuilderICP::processObservation().
◆ insertionLinDistance
| double mrpt::slam::CMetricMapBuilderICP::TConfigParams::insertionLinDistance |
Minimum robot linear (m) displacement for a new observation to be inserted in the map.
Definition at line 57 of file CMetricMapBuilderICP.h.
Referenced by operator=(), and mrpt::slam::CMetricMapBuilderICP::processObservation().
◆ localizationAngDistance
| double mrpt::slam::CMetricMapBuilderICP::TConfigParams::localizationAngDistance |
Minimum robot angular (rad, deg when loaded from the .ini) displacement for a new observation to be used to do ICP-based localization (otherwise, dead-reckon with odometry).
Definition at line 68 of file CMetricMapBuilderICP.h.
Referenced by operator=(), and mrpt::slam::CMetricMapBuilderICP::processObservation().
◆ localizationLinDistance
| double mrpt::slam::CMetricMapBuilderICP::TConfigParams::localizationLinDistance |
Minimum robot linear (m) displacement for a new observation to be used to do ICP-based localization (otherwise, dead-reckon with odometry).
Definition at line 64 of file CMetricMapBuilderICP.h.
Referenced by operator=(), and mrpt::slam::CMetricMapBuilderICP::processObservation().
◆ mapInitializers
| mrpt::maps::TSetOfMetricMapInitializers mrpt::slam::CMetricMapBuilderICP::TConfigParams::mapInitializers |
What maps to create (at least one points map and/or a grid map are needed).
For the expected format in the .ini file when loaded with loadFromConfigFile(), see documentation of TSetOfMetricMapInitializers.
Definition at line 82 of file CMetricMapBuilderICP.h.
Referenced by mrpt::slam::CMetricMapBuilderICP::initialize(), and operator=().
◆ matchAgainstTheGrid
| bool mrpt::slam::CMetricMapBuilderICP::TConfigParams::matchAgainstTheGrid |
(default:false) Match against the occupancy grid or the points map? The former is quicker but less precise.
Definition at line 53 of file CMetricMapBuilderICP.h.
Referenced by operator=(), and mrpt::slam::CMetricMapBuilderICP::processObservation().
◆ minICPgoodnessToAccept
| double mrpt::slam::CMetricMapBuilderICP::TConfigParams::minICPgoodnessToAccept |
Minimum ICP goodness (0,1) to accept the resulting corrected position (default: 0.40)
Definition at line 72 of file CMetricMapBuilderICP.h.
Referenced by operator=(), and mrpt::slam::CMetricMapBuilderICP::processObservation().
◆ verbosity_level
| mrpt::system::VerbosityLevel& mrpt::slam::CMetricMapBuilderICP::TConfigParams::verbosity_level |
Definition at line 74 of file CMetricMapBuilderICP.h.