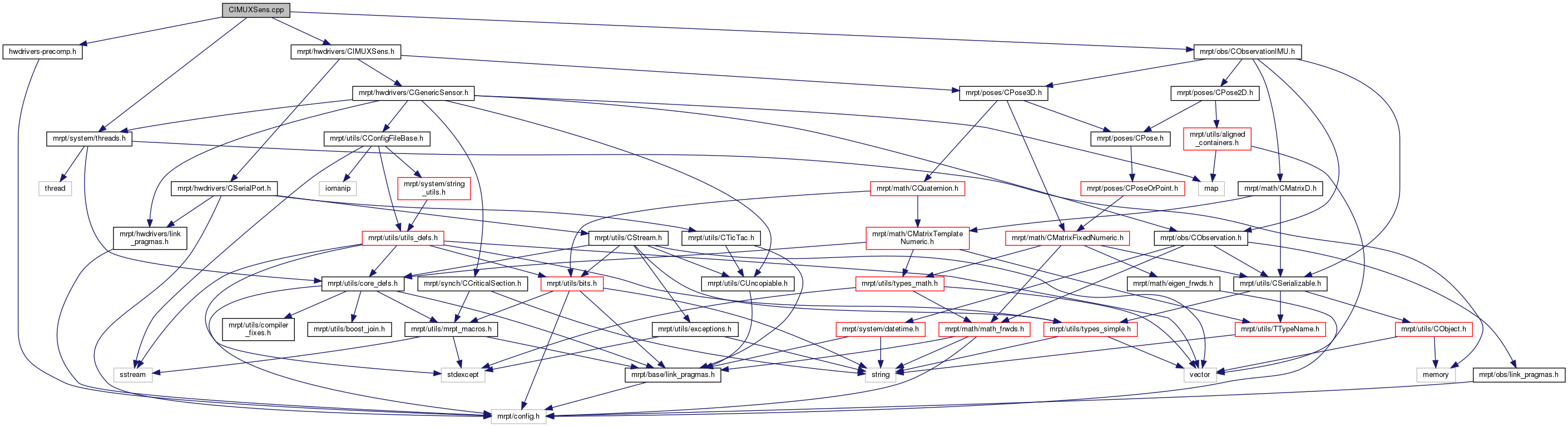
#include "hwdrivers-precomp.h"#include <mrpt/system/threads.h>#include <mrpt/hwdrivers/CIMUXSens.h>#include <mrpt/obs/CObservationIMU.h>
Include dependency graph for CIMUXSens.cpp:
Go to the source code of this file.
Macros | |
| #define | cmt3 (*static_cast<xsens::Cmt3*>(m_cmt3_ptr)) |
| #define | deviceId (*static_cast<CmtDeviceId*>(m_deviceId_ptr)) |
Macro Definition Documentation
◆ cmt3
| #define cmt3 (*static_cast<xsens::Cmt3*>(m_cmt3_ptr)) |
Definition at line 40 of file CIMUXSens.cpp.
◆ deviceId
| #define deviceId (*static_cast<CmtDeviceId*>(m_deviceId_ptr)) |
Definition at line 41 of file CIMUXSens.cpp.