#include <mrpt/base/link_pragmas.h>#include <mrpt/utils/mrpt_macros.h>#include <mrpt/utils/TEnumType.h>#include <mrpt/system/os.h>#include <mrpt/utils/CTicTac.h>#include <string>#include <deque>#include <mrpt/system/datetime.h>#include <sstream>#include <set>
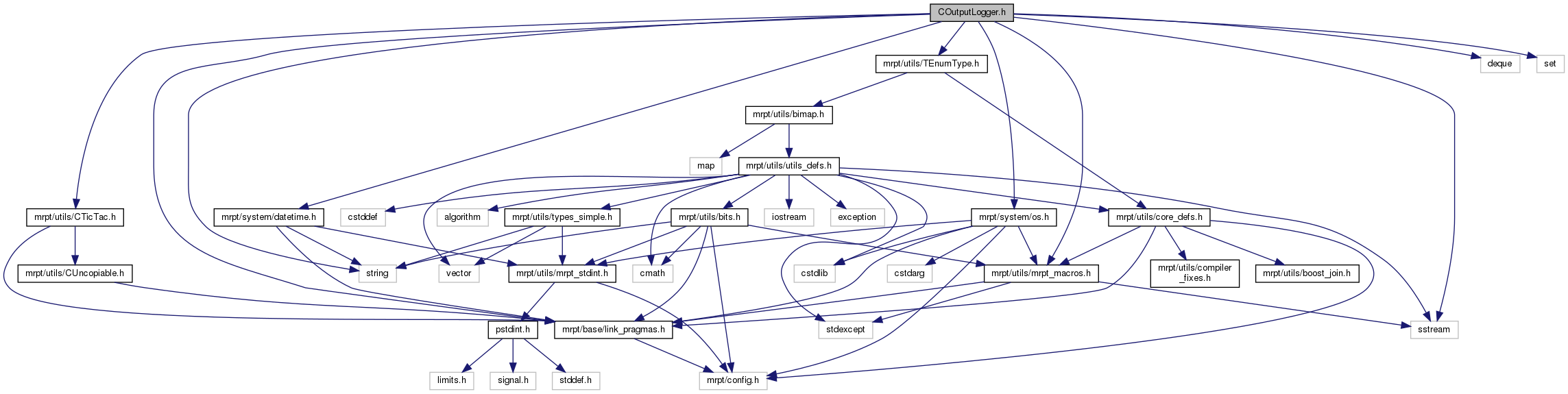
Include dependency graph for COutputLogger.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Macros | |
| #define | INTERNAL_MRPT_LOG(_LVL, _STRING) this->logStr(_LVL, _STRING) |
| #define | INTERNAL_MRPT_LOG_ONCE(_LVL, _STRING) |
| #define | INTERNAL_MRPT_LOG_FMT(_LVL, _FMT_STRING, ...) |
| #define | INTERNAL_MRPT_LOG_STREAM(_LVL, __CONTENTS) |
| #define | INTERNAL_MRPT_LOG_THROTTLE(_LVL, _PERIOD_SECONDS, _STRING) |
| #define | INTERNAL_MRPT_LOG_THROTTLE_STREAM(_LVL, _PERIOD_SECONDS, __CONTENTS) |
| #define | INTERNAL_MRPT_LOG_THROTTLE_FMT(_LVL, _PERIOD_SECONDS, _FMT_STRING, ...) |
| #define | MRPT_LOG_DEBUG(_STRING) INTERNAL_MRPT_LOG(::mrpt::utils::LVL_DEBUG, _STRING) |
| #define | MRPT_LOG_INFO(_STRING) INTERNAL_MRPT_LOG(::mrpt::utils::LVL_INFO, _STRING) |
| #define | MRPT_LOG_WARN(_STRING) INTERNAL_MRPT_LOG(::mrpt::utils::LVL_WARN, _STRING) |
| #define | MRPT_LOG_ERROR(_STRING) INTERNAL_MRPT_LOG(::mrpt::utils::LVL_ERROR, _STRING) |
| #define | MRPT_LOG_ONCE_DEBUG(_STRING) INTERNAL_MRPT_LOG_ONCE(::mrpt::utils::LVL_DEBUG, _STRING) |
| #define | MRPT_LOG_ONCE_INFO(_STRING) INTERNAL_MRPT_LOG_ONCE(::mrpt::utils::LVL_INFO, _STRING) |
| #define | MRPT_LOG_ONCE_WARN(_STRING) INTERNAL_MRPT_LOG_ONCE(::mrpt::utils::LVL_WARN, _STRING) |
| #define | MRPT_LOG_ONCE_ERROR(_STRING) INTERNAL_MRPT_LOG_ONCE(::mrpt::utils::LVL_ERROR, _STRING) |
| #define | MRPT_LOG_THROTTLE_DEBUG(_PERIOD_SECONDS, _STRING) INTERNAL_MRPT_LOG_THROTTLE(::mrpt::utils::LVL_DEBUG,_PERIOD_SECONDS, _STRING) |
| #define | MRPT_LOG_THROTTLE_INFO(_PERIOD_SECONDS, _STRING) INTERNAL_MRPT_LOG_THROTTLE(::mrpt::utils::LVL_INFO, _PERIOD_SECONDS, _STRING) |
| #define | MRPT_LOG_THROTTLE_WARN(_PERIOD_SECONDS, _STRING) INTERNAL_MRPT_LOG_THROTTLE(::mrpt::utils::LVL_WARN, _PERIOD_SECONDS, _STRING) |
| #define | MRPT_LOG_THROTTLE_ERROR(_PERIOD_SECONDS, _STRING) INTERNAL_MRPT_LOG_THROTTLE(::mrpt::utils::LVL_ERROR,_PERIOD_SECONDS, _STRING) |
| #define | MRPT_LOG_DEBUG_FMT(_FMT_STRING, ...) INTERNAL_MRPT_LOG_FMT(::mrpt::utils::LVL_DEBUG, _FMT_STRING, __VA_ARGS__) |
| #define | MRPT_LOG_INFO_FMT(_FMT_STRING, ...) INTERNAL_MRPT_LOG_FMT(::mrpt::utils::LVL_INFO, _FMT_STRING, __VA_ARGS__) |
| #define | MRPT_LOG_WARN_FMT(_FMT_STRING, ...) INTERNAL_MRPT_LOG_FMT(::mrpt::utils::LVL_WARN, _FMT_STRING, __VA_ARGS__) |
| #define | MRPT_LOG_ERROR_FMT(_FMT_STRING, ...) INTERNAL_MRPT_LOG_FMT(::mrpt::utils::LVL_ERROR, _FMT_STRING, __VA_ARGS__) |
| #define | MRPT_LOG_DEBUG_STREAM(__CONTENTS) INTERNAL_MRPT_LOG_STREAM(::mrpt::utils::LVL_DEBUG,__CONTENTS) |
| #define | MRPT_LOG_INFO_STREAM(__CONTENTS) INTERNAL_MRPT_LOG_STREAM(::mrpt::utils::LVL_INFO, __CONTENTS) |
| #define | MRPT_LOG_WARN_STREAM(__CONTENTS) INTERNAL_MRPT_LOG_STREAM(::mrpt::utils::LVL_WARN, __CONTENTS) |
| #define | MRPT_LOG_ERROR_STREAM(__CONTENTS) INTERNAL_MRPT_LOG_STREAM(::mrpt::utils::LVL_ERROR,__CONTENTS) |
| #define | MRPT_LOG_THROTTLE_DEBUG_STREAM(_PERIOD_SECONDS, __CONTENTS) INTERNAL_MRPT_LOG_THROTTLE_STREAM(::mrpt::utils::LVL_DEBUG,_PERIOD_SECONDS,__CONTENTS) |
| #define | MRPT_LOG_THROTTLE_INFO_STREAM(_PERIOD_SECONDS, __CONTENTS) INTERNAL_MRPT_LOG_THROTTLE_STREAM(::mrpt::utils::LVL_INFO, _PERIOD_SECONDS,__CONTENTS) |
| #define | MRPT_LOG_THROTTLE_WARN_STREAM(_PERIOD_SECONDS, __CONTENTS) INTERNAL_MRPT_LOG_THROTTLE_STREAM(::mrpt::utils::LVL_WARN, _PERIOD_SECONDS,__CONTENTS) |
| #define | MRPT_LOG_THROTTLE_ERROR_STREAM(_PERIOD_SECONDS, __CONTENTS) INTERNAL_MRPT_LOG_THROTTLE_STREAM(::mrpt::utils::LVL_ERROR,_PERIOD_SECONDS,__CONTENTS) |
| #define | MRPT_LOG_THROTTLE_DEBUG_FMT(_PERIOD_SECONDS, _FMT_STRING, ...) INTERNAL_MRPT_LOG_THROTTLE_FMT(::mrpt::utils::LVL_DEBUG,_PERIOD_SECONDS, _FMT_STRING, __VA_ARGS__) |
| #define | MRPT_LOG_THROTTLE_INFO_FMT(_PERIOD_SECONDS, _FMT_STRING, ...) INTERNAL_MRPT_LOG_THROTTLE_FMT(::mrpt::utils::LVL_INFO, _PERIOD_SECONDS, _FMT_STRING, __VA_ARGS__) |
| #define | MRPT_LOG_THROTTLE_WARN_FMT(_PERIOD_SECONDS, _FMT_STRING, ...) INTERNAL_MRPT_LOG_THROTTLE_FMT(::mrpt::utils::LVL_WARN, _PERIOD_SECONDS, _FMT_STRING, __VA_ARGS__) |
| #define | MRPT_LOG_THROTTLE_ERROR_FMT(_PERIOD_SECONDS, _FMT_STRING, ...) INTERNAL_MRPT_LOG_THROTTLE_FMT(::mrpt::utils::LVL_ERROR,_PERIOD_SECONDS, _FMT_STRING, __VA_ARGS__) |
| #define | DEFAULT_LOGLVL_MRPT_UNSCOPED ::mrpt::utils::LVL_DEBUG |
Macro Definition Documentation
◆ DEFAULT_LOGLVL_MRPT_UNSCOPED
| #define DEFAULT_LOGLVL_MRPT_UNSCOPED ::mrpt::utils::LVL_DEBUG |
◆ INTERNAL_MRPT_LOG
| #define INTERNAL_MRPT_LOG | ( | _LVL, | |
| _STRING | |||
| ) | this->logStr(_LVL, _STRING) |
◆ INTERNAL_MRPT_LOG_FMT
| #define INTERNAL_MRPT_LOG_FMT | ( | _LVL, | |
| _FMT_STRING, | |||
| ... | |||
| ) |
Value:
do { \
if (this->isLoggingLevelVisible(_LVL)) { \
this->logFmt(_LVL, _FMT_STRING, __VA_ARGS__); \
} } while (0)
◆ INTERNAL_MRPT_LOG_ONCE
| #define INTERNAL_MRPT_LOG_ONCE | ( | _LVL, | |
| _STRING | |||
| ) |
Value:
do { \
static once_flag = false; \
if (!once_flag) { \
once_flag = true; \
this->logStr(_LVL, _STRING); \
} } while (0)
◆ INTERNAL_MRPT_LOG_STREAM
| #define INTERNAL_MRPT_LOG_STREAM | ( | _LVL, | |
| __CONTENTS | |||
| ) |
Value:
do { \
if (this->isLoggingLevelVisible(_LVL)) { \
::mrpt::utils::COutputLoggerStreamWrapper(_LVL, *this) << __CONTENTS; \
} } while (0)
◆ INTERNAL_MRPT_LOG_THROTTLE
| #define INTERNAL_MRPT_LOG_THROTTLE | ( | _LVL, | |
| _PERIOD_SECONDS, | |||
| _STRING | |||
| ) |
Value:
do { \
if (this->isLoggingLevelVisible(_LVL)) { \
static mrpt::utils::CTicTac tim; \
if (tim.Tac()>_PERIOD_SECONDS) { \
tim.Tic(); \
this->logStr(_LVL, _STRING); \
} } } while (0)
◆ INTERNAL_MRPT_LOG_THROTTLE_FMT
| #define INTERNAL_MRPT_LOG_THROTTLE_FMT | ( | _LVL, | |
| _PERIOD_SECONDS, | |||
| _FMT_STRING, | |||
| ... | |||
| ) |
Value:
do { \
if (this->isLoggingLevelVisible(_LVL)) { \
static mrpt::utils::CTicTac tim; \
if (tim.Tac()>_PERIOD_SECONDS) { \
tim.Tic(); \
this->logFmt(_LVL, _FMT_STRING, __VA_ARGS__); \
} } } while (0)
◆ INTERNAL_MRPT_LOG_THROTTLE_STREAM
| #define INTERNAL_MRPT_LOG_THROTTLE_STREAM | ( | _LVL, | |
| _PERIOD_SECONDS, | |||
| __CONTENTS | |||
| ) |
Value:
do { \
if (this->isLoggingLevelVisible(_LVL)) { \
static mrpt::utils::CTicTac tim; \
if (tim.Tac()>_PERIOD_SECONDS) { \
tim.Tic(); \
::mrpt::utils::COutputLoggerStreamWrapper(_LVL, *this) << __CONTENTS; \
} } } while (0)
◆ MRPT_LOG_DEBUG
| #define MRPT_LOG_DEBUG | ( | _STRING | ) | INTERNAL_MRPT_LOG(::mrpt::utils::LVL_DEBUG, _STRING) |
◆ MRPT_LOG_DEBUG_FMT
| #define MRPT_LOG_DEBUG_FMT | ( | _FMT_STRING, | |
| ... | |||
| ) | INTERNAL_MRPT_LOG_FMT(::mrpt::utils::LVL_DEBUG, _FMT_STRING, __VA_ARGS__) |
◆ MRPT_LOG_DEBUG_STREAM
| #define MRPT_LOG_DEBUG_STREAM | ( | __CONTENTS | ) | INTERNAL_MRPT_LOG_STREAM(::mrpt::utils::LVL_DEBUG,__CONTENTS) |
◆ MRPT_LOG_ERROR
| #define MRPT_LOG_ERROR | ( | _STRING | ) | INTERNAL_MRPT_LOG(::mrpt::utils::LVL_ERROR, _STRING) |
◆ MRPT_LOG_ERROR_FMT
| #define MRPT_LOG_ERROR_FMT | ( | _FMT_STRING, | |
| ... | |||
| ) | INTERNAL_MRPT_LOG_FMT(::mrpt::utils::LVL_ERROR, _FMT_STRING, __VA_ARGS__) |
◆ MRPT_LOG_ERROR_STREAM
| #define MRPT_LOG_ERROR_STREAM | ( | __CONTENTS | ) | INTERNAL_MRPT_LOG_STREAM(::mrpt::utils::LVL_ERROR,__CONTENTS) |
◆ MRPT_LOG_INFO
| #define MRPT_LOG_INFO | ( | _STRING | ) | INTERNAL_MRPT_LOG(::mrpt::utils::LVL_INFO, _STRING) |
◆ MRPT_LOG_INFO_FMT
| #define MRPT_LOG_INFO_FMT | ( | _FMT_STRING, | |
| ... | |||
| ) | INTERNAL_MRPT_LOG_FMT(::mrpt::utils::LVL_INFO, _FMT_STRING, __VA_ARGS__) |
◆ MRPT_LOG_INFO_STREAM
| #define MRPT_LOG_INFO_STREAM | ( | __CONTENTS | ) | INTERNAL_MRPT_LOG_STREAM(::mrpt::utils::LVL_INFO, __CONTENTS) |
◆ MRPT_LOG_ONCE_DEBUG
| #define MRPT_LOG_ONCE_DEBUG | ( | _STRING | ) | INTERNAL_MRPT_LOG_ONCE(::mrpt::utils::LVL_DEBUG, _STRING) |
◆ MRPT_LOG_ONCE_ERROR
| #define MRPT_LOG_ONCE_ERROR | ( | _STRING | ) | INTERNAL_MRPT_LOG_ONCE(::mrpt::utils::LVL_ERROR, _STRING) |
◆ MRPT_LOG_ONCE_INFO
| #define MRPT_LOG_ONCE_INFO | ( | _STRING | ) | INTERNAL_MRPT_LOG_ONCE(::mrpt::utils::LVL_INFO, _STRING) |
◆ MRPT_LOG_ONCE_WARN
| #define MRPT_LOG_ONCE_WARN | ( | _STRING | ) | INTERNAL_MRPT_LOG_ONCE(::mrpt::utils::LVL_WARN, _STRING) |
◆ MRPT_LOG_THROTTLE_DEBUG
| #define MRPT_LOG_THROTTLE_DEBUG | ( | _PERIOD_SECONDS, | |
| _STRING | |||
| ) | INTERNAL_MRPT_LOG_THROTTLE(::mrpt::utils::LVL_DEBUG,_PERIOD_SECONDS, _STRING) |
◆ MRPT_LOG_THROTTLE_DEBUG_FMT
| #define MRPT_LOG_THROTTLE_DEBUG_FMT | ( | _PERIOD_SECONDS, | |
| _FMT_STRING, | |||
| ... | |||
| ) | INTERNAL_MRPT_LOG_THROTTLE_FMT(::mrpt::utils::LVL_DEBUG,_PERIOD_SECONDS, _FMT_STRING, __VA_ARGS__) |
◆ MRPT_LOG_THROTTLE_DEBUG_STREAM
| #define MRPT_LOG_THROTTLE_DEBUG_STREAM | ( | _PERIOD_SECONDS, | |
| __CONTENTS | |||
| ) | INTERNAL_MRPT_LOG_THROTTLE_STREAM(::mrpt::utils::LVL_DEBUG,_PERIOD_SECONDS,__CONTENTS) |
◆ MRPT_LOG_THROTTLE_ERROR
| #define MRPT_LOG_THROTTLE_ERROR | ( | _PERIOD_SECONDS, | |
| _STRING | |||
| ) | INTERNAL_MRPT_LOG_THROTTLE(::mrpt::utils::LVL_ERROR,_PERIOD_SECONDS, _STRING) |
◆ MRPT_LOG_THROTTLE_ERROR_FMT
| #define MRPT_LOG_THROTTLE_ERROR_FMT | ( | _PERIOD_SECONDS, | |
| _FMT_STRING, | |||
| ... | |||
| ) | INTERNAL_MRPT_LOG_THROTTLE_FMT(::mrpt::utils::LVL_ERROR,_PERIOD_SECONDS, _FMT_STRING, __VA_ARGS__) |
◆ MRPT_LOG_THROTTLE_ERROR_STREAM
| #define MRPT_LOG_THROTTLE_ERROR_STREAM | ( | _PERIOD_SECONDS, | |
| __CONTENTS | |||
| ) | INTERNAL_MRPT_LOG_THROTTLE_STREAM(::mrpt::utils::LVL_ERROR,_PERIOD_SECONDS,__CONTENTS) |
◆ MRPT_LOG_THROTTLE_INFO
| #define MRPT_LOG_THROTTLE_INFO | ( | _PERIOD_SECONDS, | |
| _STRING | |||
| ) | INTERNAL_MRPT_LOG_THROTTLE(::mrpt::utils::LVL_INFO, _PERIOD_SECONDS, _STRING) |
◆ MRPT_LOG_THROTTLE_INFO_FMT
| #define MRPT_LOG_THROTTLE_INFO_FMT | ( | _PERIOD_SECONDS, | |
| _FMT_STRING, | |||
| ... | |||
| ) | INTERNAL_MRPT_LOG_THROTTLE_FMT(::mrpt::utils::LVL_INFO, _PERIOD_SECONDS, _FMT_STRING, __VA_ARGS__) |
◆ MRPT_LOG_THROTTLE_INFO_STREAM
| #define MRPT_LOG_THROTTLE_INFO_STREAM | ( | _PERIOD_SECONDS, | |
| __CONTENTS | |||
| ) | INTERNAL_MRPT_LOG_THROTTLE_STREAM(::mrpt::utils::LVL_INFO, _PERIOD_SECONDS,__CONTENTS) |
◆ MRPT_LOG_THROTTLE_WARN
| #define MRPT_LOG_THROTTLE_WARN | ( | _PERIOD_SECONDS, | |
| _STRING | |||
| ) | INTERNAL_MRPT_LOG_THROTTLE(::mrpt::utils::LVL_WARN, _PERIOD_SECONDS, _STRING) |
◆ MRPT_LOG_THROTTLE_WARN_FMT
| #define MRPT_LOG_THROTTLE_WARN_FMT | ( | _PERIOD_SECONDS, | |
| _FMT_STRING, | |||
| ... | |||
| ) | INTERNAL_MRPT_LOG_THROTTLE_FMT(::mrpt::utils::LVL_WARN, _PERIOD_SECONDS, _FMT_STRING, __VA_ARGS__) |
◆ MRPT_LOG_THROTTLE_WARN_STREAM
| #define MRPT_LOG_THROTTLE_WARN_STREAM | ( | _PERIOD_SECONDS, | |
| __CONTENTS | |||
| ) | INTERNAL_MRPT_LOG_THROTTLE_STREAM(::mrpt::utils::LVL_WARN, _PERIOD_SECONDS,__CONTENTS) |
◆ MRPT_LOG_WARN
| #define MRPT_LOG_WARN | ( | _STRING | ) | INTERNAL_MRPT_LOG(::mrpt::utils::LVL_WARN, _STRING) |
◆ MRPT_LOG_WARN_FMT
| #define MRPT_LOG_WARN_FMT | ( | _FMT_STRING, | |
| ... | |||
| ) | INTERNAL_MRPT_LOG_FMT(::mrpt::utils::LVL_WARN, _FMT_STRING, __VA_ARGS__) |
◆ MRPT_LOG_WARN_STREAM
| #define MRPT_LOG_WARN_STREAM | ( | __CONTENTS | ) | INTERNAL_MRPT_LOG_STREAM(::mrpt::utils::LVL_WARN, __CONTENTS) |