#include <mrpt/poses/CPose2D.h>#include <mrpt/poses/CPose3D.h>#include <mrpt/utils/types_simple.h>#include <iostream>#include <string>#include <sstream>#include "THypothesis_impl.h"
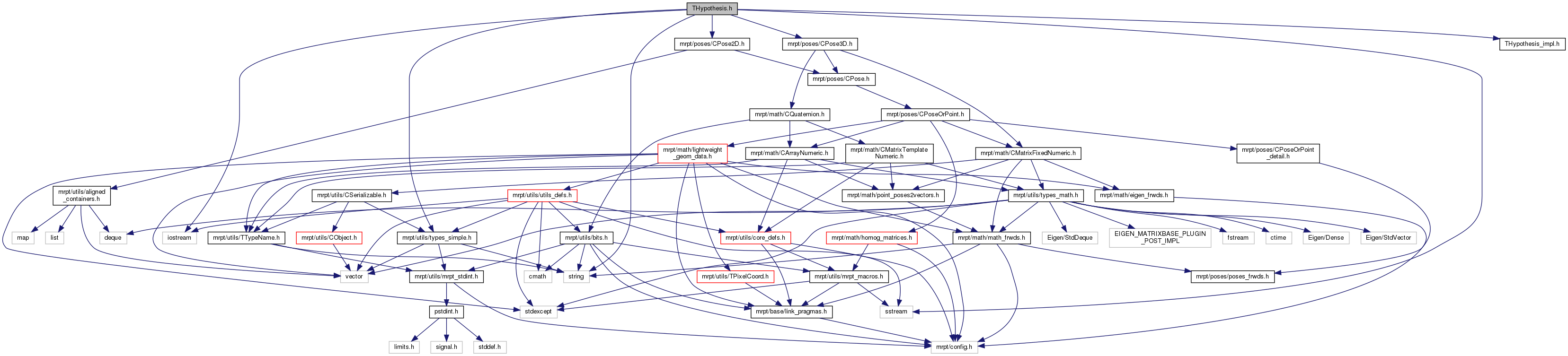
Include dependency graph for THypothesis.h:
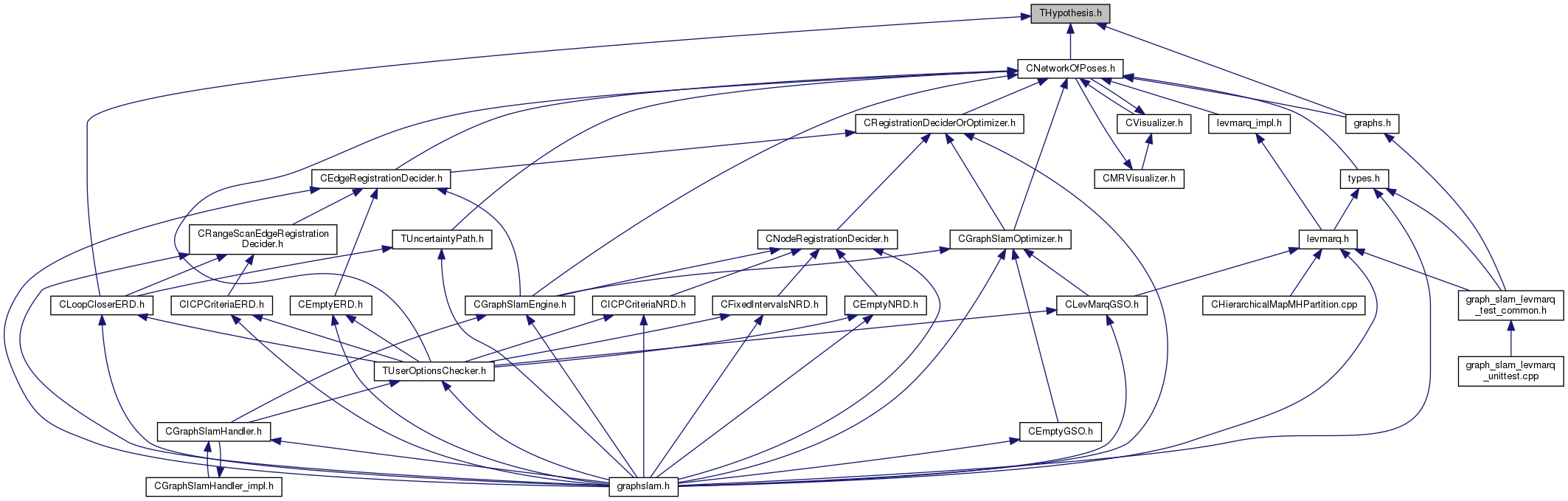
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | mrpt::graphs::detail::THypothesis< GRAPH_T > |
| An edge hypothesis between two nodeIDs. More... | |
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::graphs | |
| Abstract graph and tree data structures, plus generic graph algorithms. | |
| mrpt::graphs::detail | |
| Internal functions for MRPT. | |