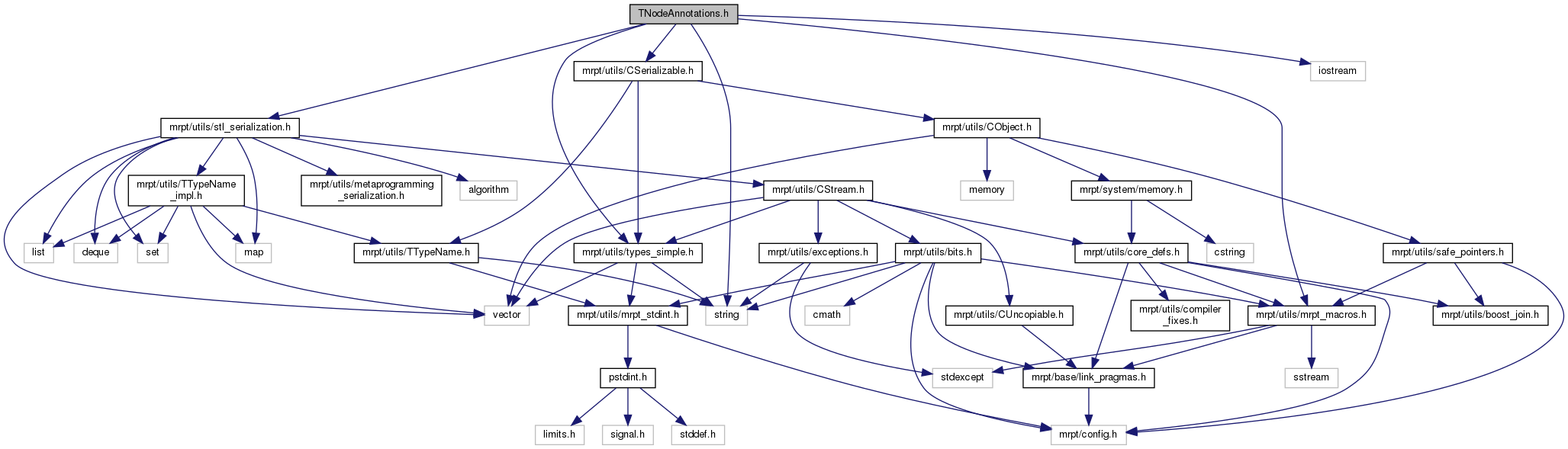
#include <mrpt/utils/stl_serialization.h>#include <mrpt/utils/CSerializable.h>#include <mrpt/utils/types_simple.h>#include <mrpt/utils/mrpt_macros.h>#include <iostream>#include <string>
Include dependency graph for TNodeAnnotations.h:
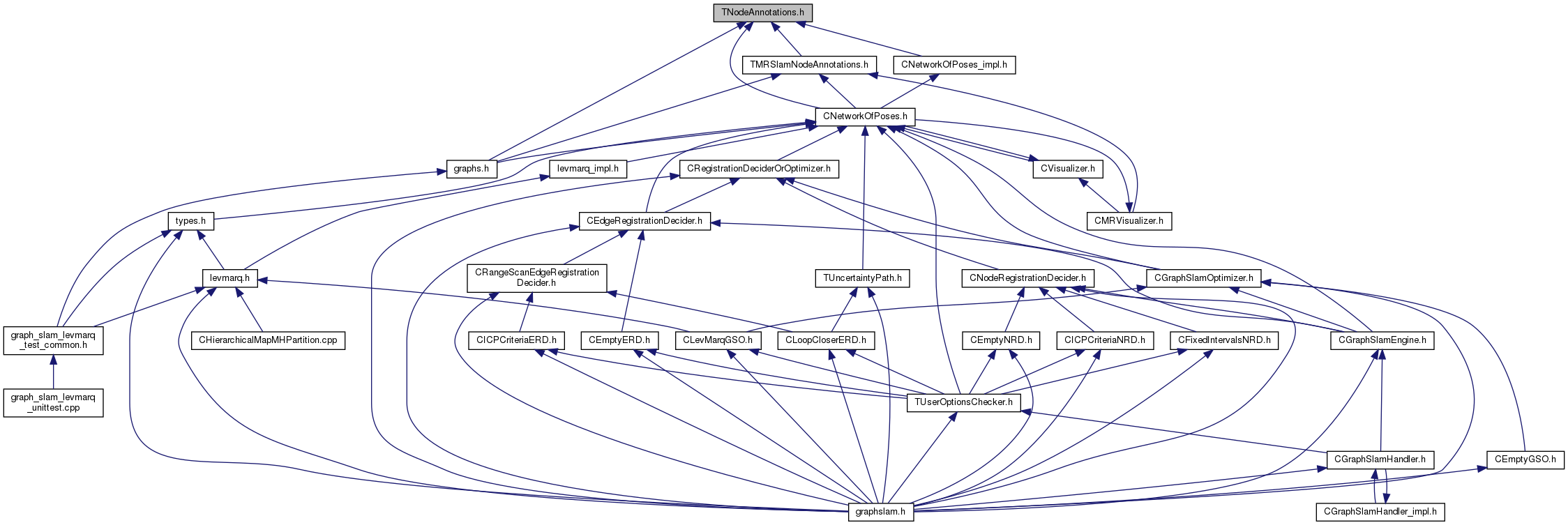
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | mrpt::graphs::detail::TNodeAnnotations |
| Abstract class from which NodeAnnotations related classes can be implemented. More... | |
| struct | mrpt::graphs::detail::TNodeAnnotationsEmpty |
| Struct to be used as the NODE_ANNOTATIONS template argument in CNetworkOfPoses class instances for use in multiple-robot SLAM applications. More... | |
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::graphs | |
| Abstract graph and tree data structures, plus generic graph algorithms. | |
| mrpt::graphs::detail | |
| Internal functions for MRPT. | |
| mrpt::utils | |
| Classes for serialization, sockets, ini-file manipulation, streams, list of properties-values, timewatch, extensions to STL. | |