#include "vision-precomp.h"#include <mrpt/system/filesystem.h>#include <mrpt/utils/CConfigFileMemory.h>#include <mrpt/vision/chessboard_find_corners.h>#include <mrpt/vision/chessboard_stereo_camera_calib.h>#include <mrpt/vision/pinhole.h>#include <mrpt/math/robust_kernels.h>#include <mrpt/math/wrap2pi.h>#include <algorithm>#include "chessboard_stereo_camera_calib_internal.h"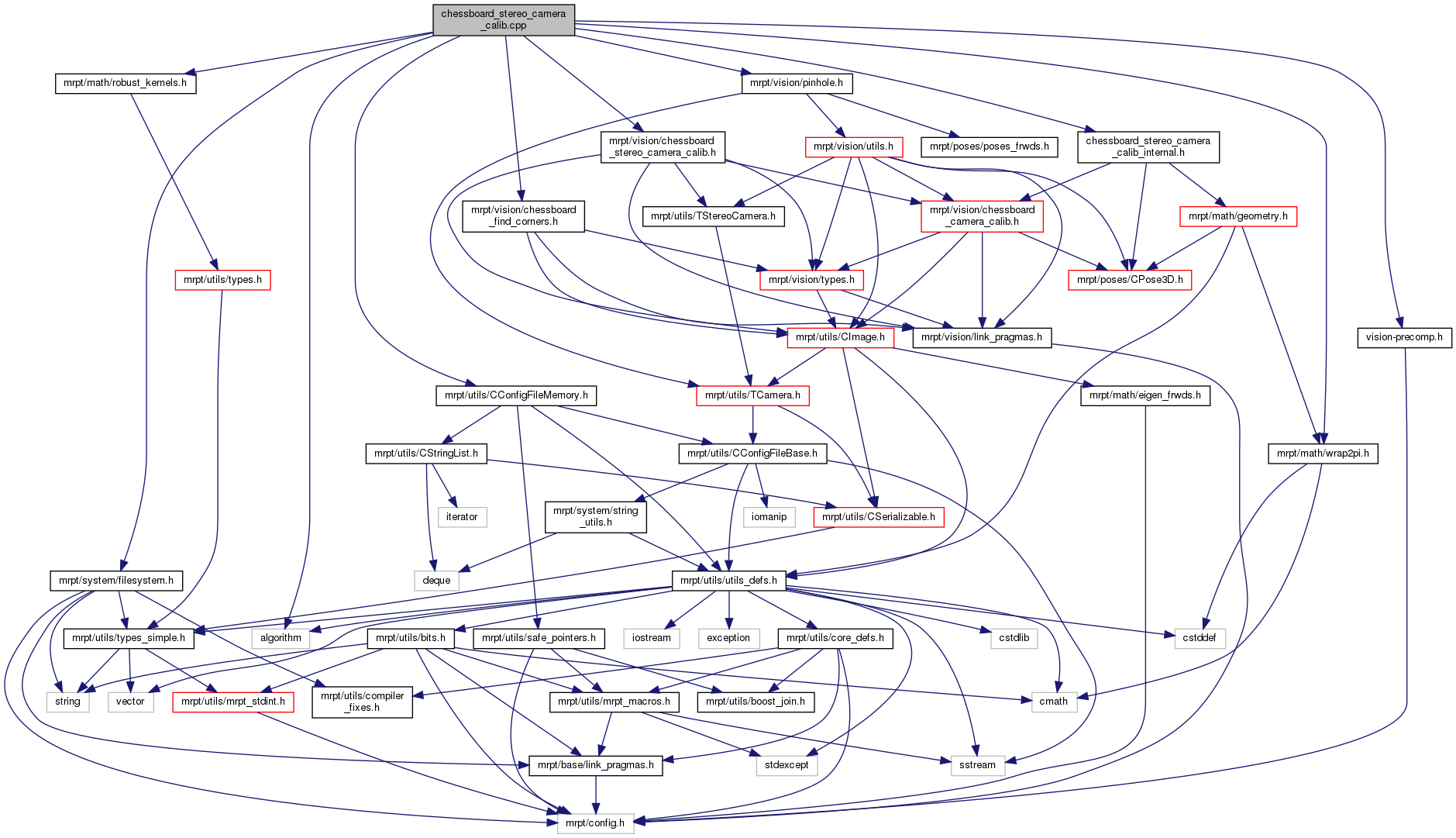
Go to the source code of this file.
Functions | |
| void | jacob_db_dp (const TPoint3D &p, Eigen::Matrix< double, 2, 3 > &G) |
| void | jacob_dh_db_and_dh_dc (const TPoint3D &nP, const Eigen::Matrix< double, 9, 1 > &c, Eigen::Matrix< double, 2, 2 > &Hb, Eigen::Matrix< double, 2, 9 > &Hc) |
| void | jacob_deps_D_p_deps (const TPoint3D &p_D, Eigen::Matrix< double, 3, 6 > &dpl_del) |
| void | jacob_dA_eps_D_p_deps (const CPose3D &A, const CPose3D &D, const TPoint3D &p, Eigen::Matrix< double, 3, 6 > &dp_deps) |
| void | project_point (const mrpt::math::TPoint3D &P, const mrpt::utils::TCamera ¶ms, const CPose3D &cameraPose, mrpt::utils::TPixelCoordf &px) |
Function Documentation
◆ jacob_dA_eps_D_p_deps()
| void jacob_dA_eps_D_p_deps | ( | const CPose3D & | A, |
| const CPose3D & | D, | ||
| const TPoint3D & | p, | ||
| Eigen::Matrix< double, 3, 6 > & | dp_deps | ||
| ) |
Definition at line 585 of file chessboard_stereo_camera_calib.cpp.
References mrpt::poses::CPose3D::getRotationMatrix(), mrpt::math::skew_symmetric3_neg(), mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::x(), and mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::y().
Referenced by mrpt::vision::recompute_errors_and_Jacobians().
◆ jacob_db_dp()
Definition at line 491 of file chessboard_stereo_camera_calib.cpp.
Referenced by mrpt::vision::recompute_errors_and_Jacobians().
◆ jacob_deps_D_p_deps()
Definition at line 576 of file chessboard_stereo_camera_calib.cpp.
References mrpt::math::skew_symmetric3_neg().
Referenced by mrpt::vision::recompute_errors_and_Jacobians().
◆ jacob_dh_db_and_dh_dc()
| void jacob_dh_db_and_dh_dc | ( | const TPoint3D & | nP, |
| const Eigen::Matrix< double, 9, 1 > & | c, | ||
| Eigen::Matrix< double, 2, 2 > & | Hb, | ||
| Eigen::Matrix< double, 2, 9 > & | Hc | ||
| ) |
Definition at line 524 of file chessboard_stereo_camera_calib.cpp.
References mrpt::math::TPoint3D::x, mrpt::math::TPoint3D::y, and mrpt::math::TPoint3D::z.
Referenced by mrpt::vision::recompute_errors_and_Jacobians().
◆ project_point()
| void project_point | ( | const mrpt::math::TPoint3D & | P, |
| const mrpt::utils::TCamera & | params, | ||
| const CPose3D & | cameraPose, | ||
| mrpt::utils::TPixelCoordf & | px | ||
| ) |
Definition at line 607 of file chessboard_stereo_camera_calib.cpp.
References mrpt::poses::CPose3D::composePoint(), mrpt::math::square(), mrpt::math::TPoint3D::x, mrpt::utils::TPixelCoordf::x, mrpt::math::TPoint3D::y, mrpt::utils::TPixelCoordf::y, and mrpt::math::TPoint3D::z.
Referenced by mrpt::vision::recompute_errors_and_Jacobians().