#include <mrpt/graphs/CDirectedGraph.h>#include <mrpt/graphs/CDirectedTree.h>#include <mrpt/utils/traits_map.h>#include <mrpt/math/utils.h>#include <limits>#include <iostream>#include <vector>#include <utility>#include <exception>
Include dependency graph for dijkstra.h:

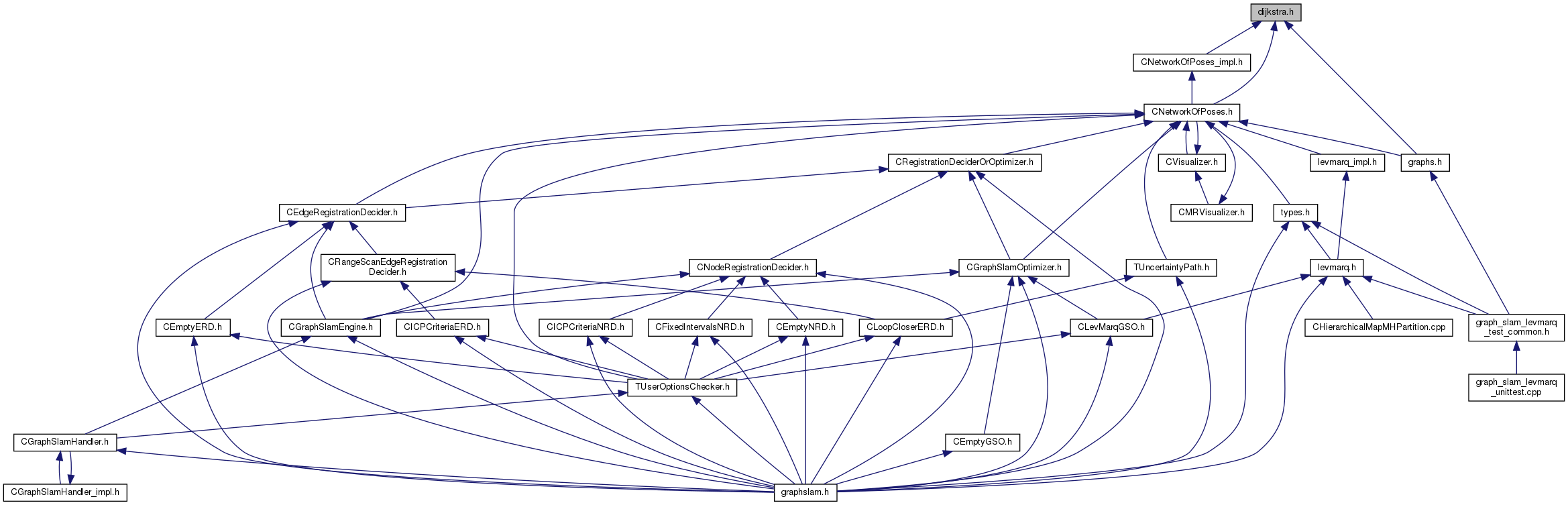
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | mrpt::graphs::detail::NotConnectedGraph |
| Custom exception class that passes information in case an unconnected graph is passed to a Dijkstra instance. More... | |
| class | mrpt::graphs::CDijkstra< TYPE_GRAPH, MAPS_IMPLEMENTATION > |
| The Dijkstra algorithm for finding the shortest path between a given source node in a (weighted) directed graph and all other nodes in the form of a tree. More... | |
| struct | mrpt::graphs::CDijkstra< TYPE_GRAPH, MAPS_IMPLEMENTATION >::TDistance |
| Auxiliary struct for topological distances from root node. More... | |
| struct | mrpt::graphs::CDijkstra< TYPE_GRAPH, MAPS_IMPLEMENTATION >::TPrevious |
| Auxiliary struct for backward paths. More... | |
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::graphs | |
| Abstract graph and tree data structures, plus generic graph algorithms. | |
| mrpt::graphs::detail | |
| Internal functions for MRPT. | |