#include <mrpt/vision/CFeatureExtraction.h>#include <mrpt/maps/CMetricMap.h>#include <mrpt/maps/CLandmark.h>#include <mrpt/obs/CObservationImage.h>#include <mrpt/obs/CObservation2DRangeScan.h>#include <mrpt/obs/CObservationGPS.h>#include <mrpt/obs/CObservationBearingRange.h>#include <mrpt/utils/CSerializable.h>#include <mrpt/math/CMatrix.h>#include <mrpt/utils/CDynamicGrid.h>#include <mrpt/utils/CLoadableOptions.h>#include <mrpt/obs/obs_frwds.h>
Include dependency graph for maps/CLandmarksMap.h:
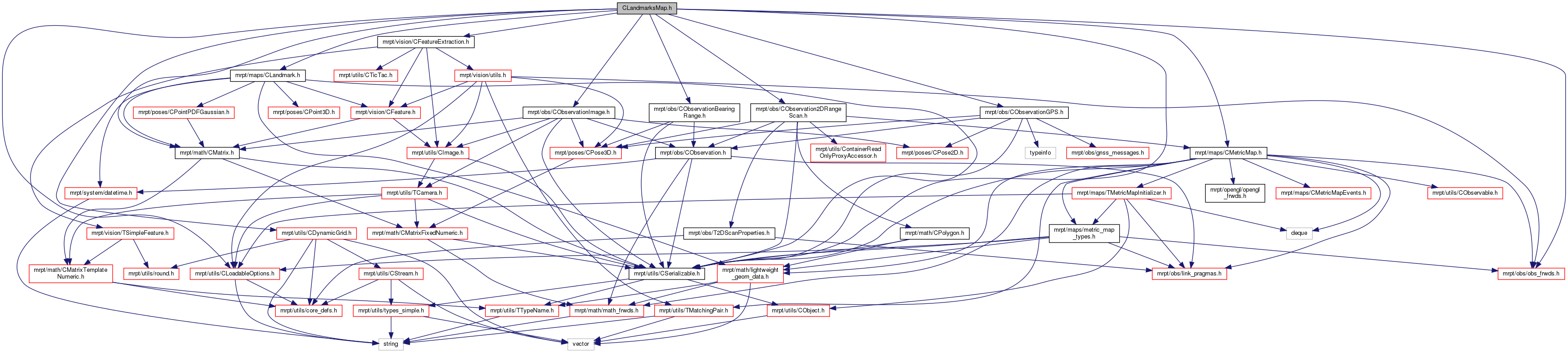
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | mrpt::maps::CLandmarksMap |
| A class for storing a map of 3D probabilistic landmarks. More... | |
| struct | mrpt::maps::CLandmarksMap::TCustomSequenceLandmarks |
| The list of landmarks: the wrapper class is just for maintaining the KD-Tree representation. More... | |
| struct | mrpt::maps::CLandmarksMap::TInsertionOptions |
| With this struct options are provided to the observation insertion process. More... | |
| struct | mrpt::maps::CLandmarksMap::TLikelihoodOptions |
| With this struct options are provided to the likelihood computations. More... | |
| struct | mrpt::maps::CLandmarksMap::TLikelihoodOptions::TGPSOrigin |
| This struct store de GPS longitude, latitude (in degrees ) and altitude (in meters) for the first GPS observation compose with de sensor position on the robot. More... | |
| struct | mrpt::maps::CLandmarksMap::TInsertionResults |
| This struct stores extra results from invoking insertObservation. More... | |
| struct | mrpt::maps::CLandmarksMap::TFuseOptions |
| With this struct options are provided to the fusion process. More... | |
| struct | mrpt::maps::CLandmarksMap::TMapDefinitionBase |
| struct | mrpt::maps::CLandmarksMap::TMapDefinition |
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::maps | |
| mrpt::maps::internal | |
Typedefs | |
| typedef std::vector< CLandmark > | mrpt::maps::internal::TSequenceLandmarks |
Functions | |
| ::mrpt::utils::CStream & | mrpt::maps::operator>> (mrpt::utils::CStream &in, CLandmarksMapPtr &pObj) |