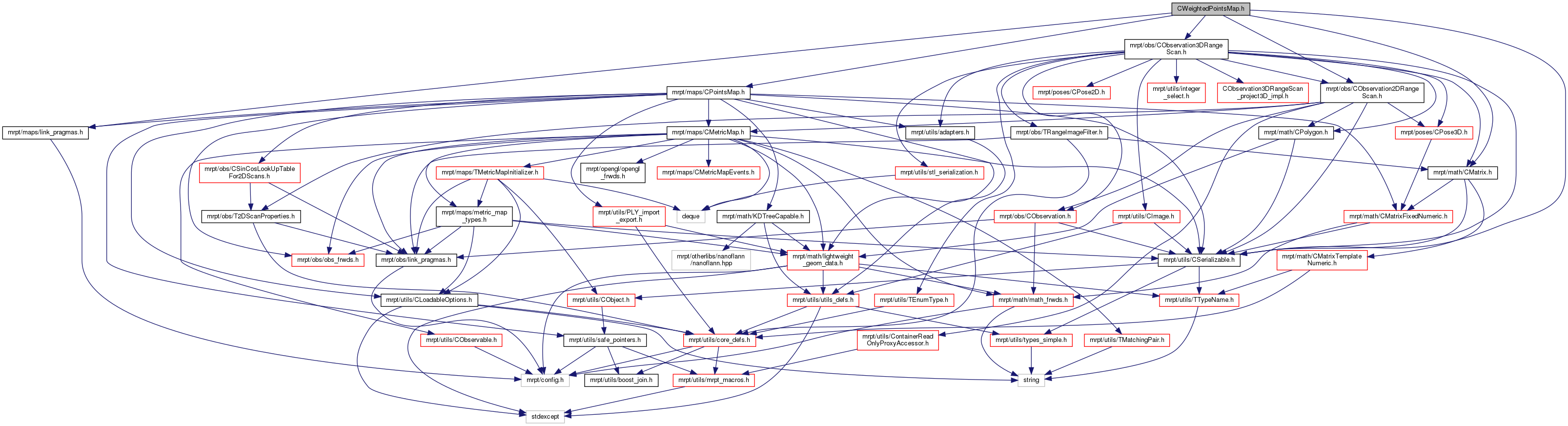
#include <mrpt/maps/CPointsMap.h>#include <mrpt/obs/CObservation2DRangeScan.h>#include <mrpt/obs/CObservation3DRangeScan.h>#include <mrpt/utils/CSerializable.h>#include <mrpt/math/CMatrix.h>#include <mrpt/maps/link_pragmas.h>
Include dependency graph for maps/CWeightedPointsMap.h:
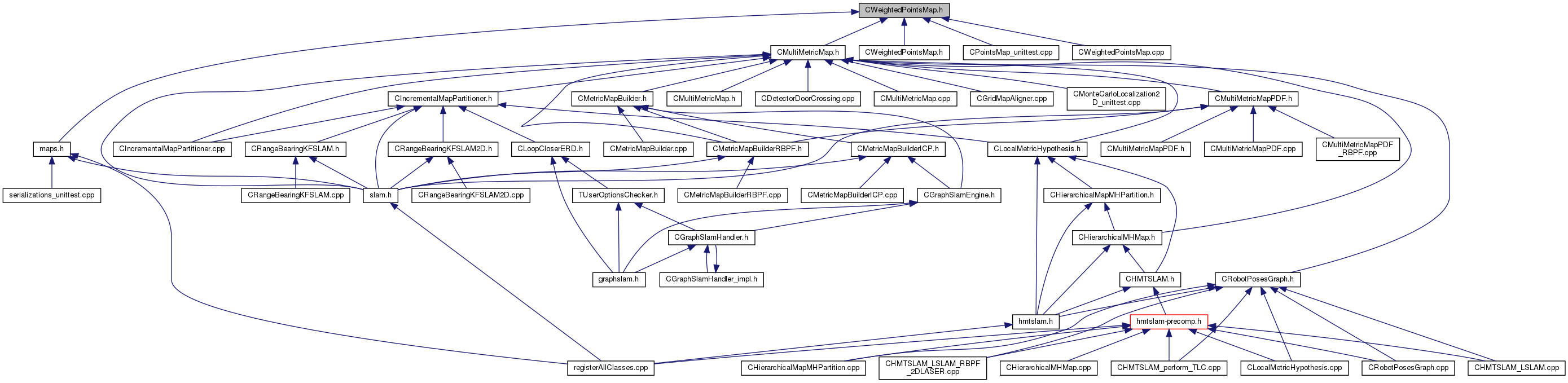
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | mrpt::maps::CWeightedPointsMap |
| A cloud of points in 2D or 3D, which can be built from a sequence of laser scans. More... | |
| struct | mrpt::maps::CWeightedPointsMap::TMapDefinitionBase |
| struct | mrpt::maps::CWeightedPointsMap::TMapDefinition |
| class | mrpt::utils::PointCloudAdapter< mrpt::maps::CWeightedPointsMap > |
| Specialization mrpt::utils::PointCloudAdapter<mrpt::maps::CWeightedPointsMap> More... | |
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::maps | |
| mrpt::utils | |
| Classes for serialization, sockets, ini-file manipulation, streams, list of properties-values, timewatch, extensions to STL. | |
Functions | |
| ::mrpt::utils::CStream & | mrpt::maps::operator>> (mrpt::utils::CStream &in, CWeightedPointsMapPtr &pObj) |