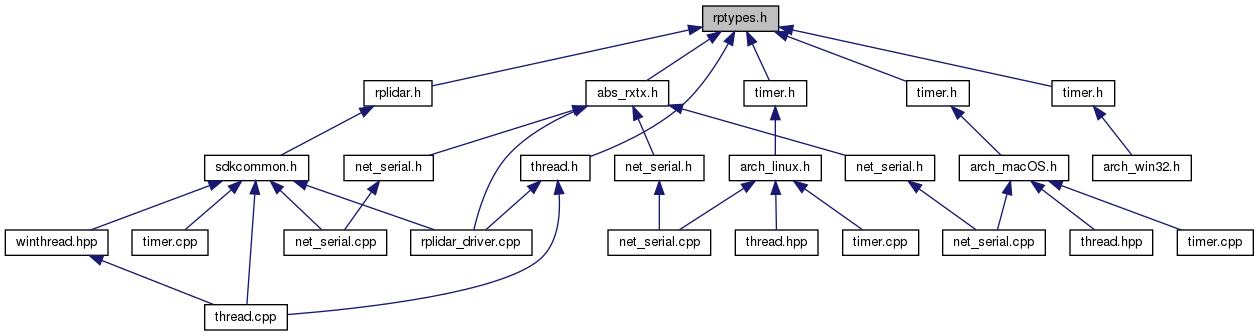
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Macros | |
| #define | __small_endian |
| #define | __attribute__(x) |
| #define | RESULT_OK 0 |
| #define | RESULT_FAIL_BIT 0x80000000 |
| #define | RESULT_ALREADY_DONE 0x20 |
| #define | RESULT_INVALID_DATA (0x8000 | RESULT_FAIL_BIT) |
| #define | RESULT_OPERATION_FAIL (0x8001 | RESULT_FAIL_BIT) |
| #define | RESULT_OPERATION_TIMEOUT (0x8002 | RESULT_FAIL_BIT) |
| #define | RESULT_OPERATION_STOP (0x8003 | RESULT_FAIL_BIT) |
| #define | RESULT_OPERATION_NOT_SUPPORT (0x8004 | RESULT_FAIL_BIT) |
| #define | RESULT_FORMAT_NOT_SUPPORT (0x8005 | RESULT_FAIL_BIT) |
| #define | RESULT_INSUFFICIENT_MEMORY (0x8006 | RESULT_FAIL_BIT) |
| #define | IS_OK(x) ( ((x) & RESULT_FAIL_BIT) == 0 ) |
| #define | IS_FAIL(x) ( ((x) & RESULT_FAIL_BIT) ) |
Typedefs | |
| typedef signed char | int8_t |
| typedef unsigned char | uint8_t |
| typedef __int16 | int16_t |
| typedef unsigned __int16 | uint16_t |
| typedef __int32 | int32_t |
| typedef unsigned __int32 | uint32_t |
| typedef __int64 | int64_t |
| typedef unsigned __int64 | uint64_t |
| typedef int8_t | _s8 |
| typedef uint8_t | _u8 |
| typedef int16_t | _s16 |
| typedef uint16_t | _u16 |
| typedef int32_t | _s32 |
| typedef uint32_t | _u32 |
| typedef int64_t | _s64 |
| typedef uint64_t | _u64 |
| typedef uint32_t | u_result |
Functions | |
| typedef | _word_size_t (THREAD_PROC *thread_proc_t)(void *) |
Macro Definition Documentation
◆ __attribute__
◆ __small_endian
◆ IS_FAIL
| #define IS_FAIL | ( | x | ) | ( ((x) & RESULT_FAIL_BIT) ) |
◆ IS_OK
| #define IS_OK | ( | x | ) | ( ((x) & RESULT_FAIL_BIT) == 0 ) |
◆ RESULT_ALREADY_DONE
◆ RESULT_FAIL_BIT
◆ RESULT_FORMAT_NOT_SUPPORT
| #define RESULT_FORMAT_NOT_SUPPORT (0x8005 | RESULT_FAIL_BIT) |
◆ RESULT_INSUFFICIENT_MEMORY
| #define RESULT_INSUFFICIENT_MEMORY (0x8006 | RESULT_FAIL_BIT) |
◆ RESULT_INVALID_DATA
| #define RESULT_INVALID_DATA (0x8000 | RESULT_FAIL_BIT) |
◆ RESULT_OK
◆ RESULT_OPERATION_FAIL
| #define RESULT_OPERATION_FAIL (0x8001 | RESULT_FAIL_BIT) |
◆ RESULT_OPERATION_NOT_SUPPORT
| #define RESULT_OPERATION_NOT_SUPPORT (0x8004 | RESULT_FAIL_BIT) |
◆ RESULT_OPERATION_STOP
| #define RESULT_OPERATION_STOP (0x8003 | RESULT_FAIL_BIT) |
◆ RESULT_OPERATION_TIMEOUT
| #define RESULT_OPERATION_TIMEOUT (0x8002 | RESULT_FAIL_BIT) |
Typedef Documentation
◆ _s16
◆ _s32
◆ _s64
◆ _s8
◆ _u16
◆ _u32
◆ _u64
◆ _u8
◆ int16_t
◆ int32_t
◆ int64_t
◆ int8_t
◆ u_result
◆ uint16_t
◆ uint32_t
◆ uint64_t
◆ uint8_t
Function Documentation
◆ _word_size_t()
| typedef _word_size_t | ( | THREAD_PROC * | thread_proc_t | ) |
Referenced by rp::arch::net::raw_serial::waitfordata().