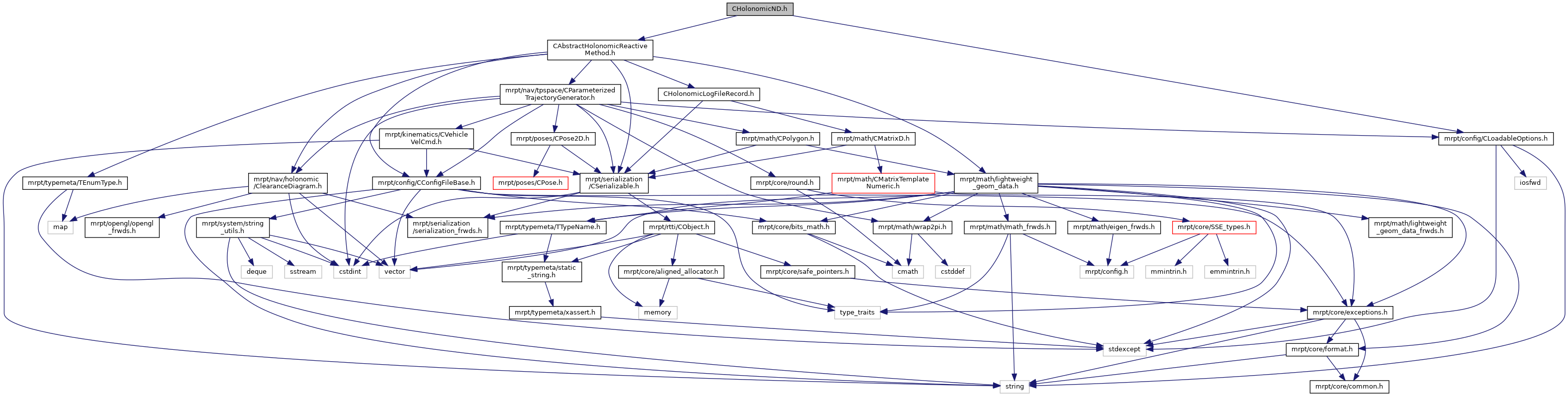
Include dependency graph for CHolonomicND.h:
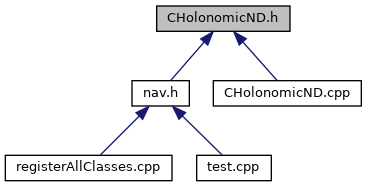
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | mrpt::nav::CHolonomicND |
| An implementation of the holonomic reactive navigation method "Nearness-Diagram". More... | |
| struct | mrpt::nav::CHolonomicND::TGap |
| The structure used to store a detected gap in obstacles. More... | |
| struct | mrpt::nav::CHolonomicND::TOptions |
| Algorithm options. More... | |
| class | mrpt::nav::CLogFileRecord_ND |
| A class for storing extra information about the execution of CHolonomicND navigation. More... | |
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::nav | |
Functions | |
| MRPT_FILL_ENUM_MEMBER (CHolonomicND, SITUATION_TARGET_DIRECTLY) | |
| MRPT_FILL_ENUM_MEMBER (CHolonomicND, SITUATION_SMALL_GAP) | |
| MRPT_FILL_ENUM_MEMBER (CHolonomicND, SITUATION_WIDE_GAP) | |
| MRPT_FILL_ENUM_MEMBER (CHolonomicND, SITUATION_NO_WAY_FOUND) | |
Function Documentation
◆ MRPT_FILL_ENUM_MEMBER() [1/4]
| MRPT_FILL_ENUM_MEMBER | ( | CHolonomicND | , |
| SITUATION_NO_WAY_FOUND | |||
| ) |
◆ MRPT_FILL_ENUM_MEMBER() [2/4]
| MRPT_FILL_ENUM_MEMBER | ( | CHolonomicND | , |
| SITUATION_SMALL_GAP | |||
| ) |
◆ MRPT_FILL_ENUM_MEMBER() [3/4]
| MRPT_FILL_ENUM_MEMBER | ( | CHolonomicND | , |
| SITUATION_TARGET_DIRECTLY | |||
| ) |
◆ MRPT_FILL_ENUM_MEMBER() [4/4]
| MRPT_FILL_ENUM_MEMBER | ( | CHolonomicND | , |
| SITUATION_WIDE_GAP | |||
| ) |