#include <cstdint>#include <utility>
Include dependency graph for TNodeID.h:
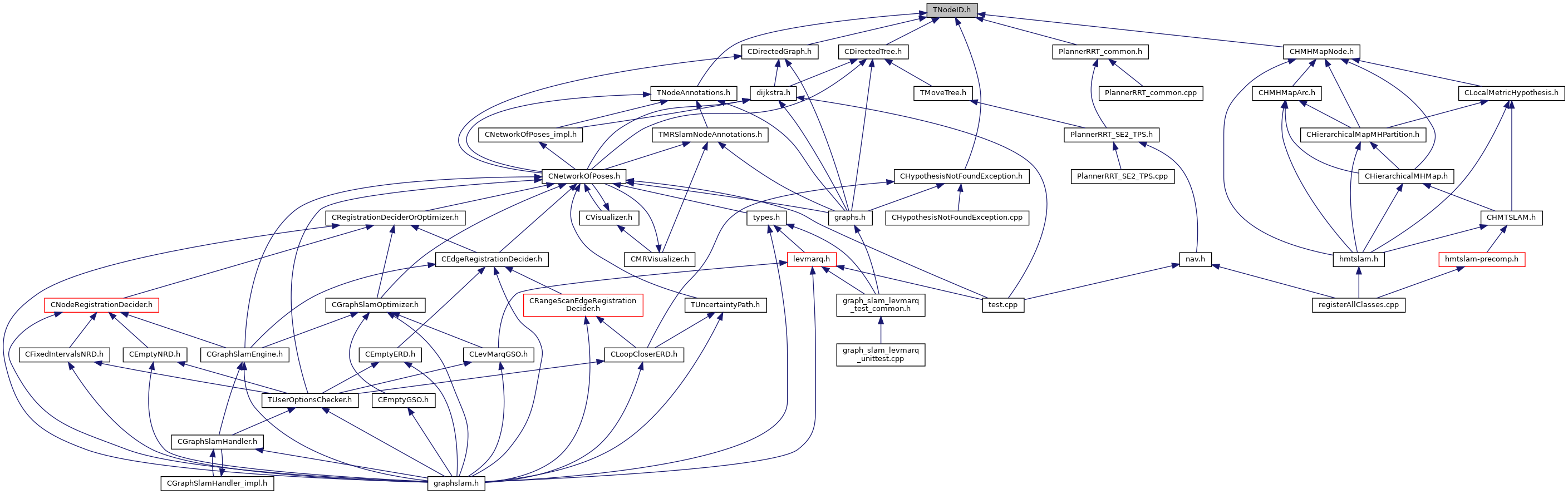
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::graphs | |
| Abstract graph and tree data structures, plus generic graph algorithms. | |
Macros | |
| #define | INVALID_NODEID static_cast<mrpt::graphs::TNodeID>(-1) |
Typedefs | |
| using | mrpt::graphs::TNodeID = uint64_t |
| A generic numeric type for unique IDs of nodes or entities. More... | |
| using | mrpt::graphs::TPairNodeIDs = std::pair< TNodeID, TNodeID > |
| A pair of node IDs. More... | |
Macro Definition Documentation
◆ INVALID_NODEID
| #define INVALID_NODEID static_cast<mrpt::graphs::TNodeID>(-1) |