Introduction
This is the home of the MRPT C++ library documentation generated by Doxygen. See the CHANGELOG for this release.
You can browse the complete list of classes here, or use the tabs on the top of this page for looking for a specific namespace, hierarchy of classes, etc.
This reference documentation is complementary to the MRPT book available for download at the main web site.
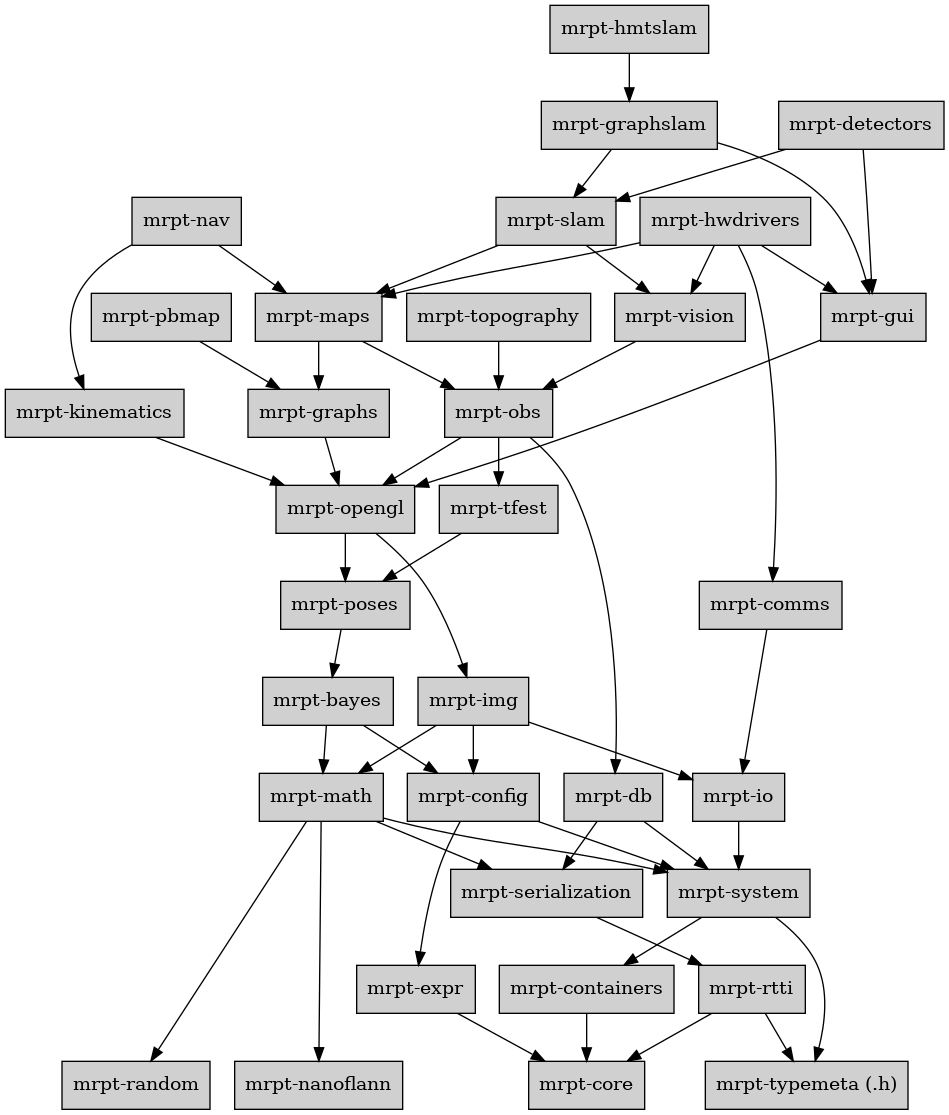
Libraries / Modules
Click on a library name to see a summary of its contents, or explore the complete list of modules. Mark meaning:
- (*): experimental libraries.
- (.h): Header-only libraries. Don't require any .so/.dll file, just adding #include<>'s to user code.
Read also the guide to write new MRPT libraries.
Dependencies
Check out this page to find out what are needed for each of the MRPT build dependencies (opencv, wxWidgets,...) to decide if you need them for your applications.
Performance benchmarks
Extensive performance tests are automated by means of the application mrpt-performance.
To see the results on different platforms, as well as a comparison between different compilers and platforms, see the performance page.