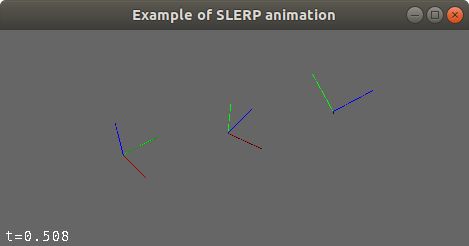
Example: math_slerp_example
C++ example source code:
/* +------------------------------------------------------------------------+ | Mobile Robot Programming Toolkit (MRPT) | | https://www.mrpt.org/ | | | | Copyright (c) 2005-2026, Individual contributors, see AUTHORS file | | See: https://www.mrpt.org/Authors - All rights reserved. | | Released under BSD License. See: https://www.mrpt.org/License | +------------------------------------------------------------------------+ */ #include <mrpt/gui/CDisplayWindow3D.h> #include <mrpt/img/TColor.h> #include <mrpt/math/slerp.h> #include <mrpt/opengl/CGridPlaneXY.h> #include <mrpt/opengl/stock_objects.h> #include <mrpt/system/CTicTac.h> #include <chrono> #include <iostream> #include <thread> using namespace std; using namespace mrpt::literals; // _deg using namespace mrpt::math; using namespace mrpt::gui; using namespace mrpt::opengl; using namespace mrpt::poses; using namespace mrpt::img; // ------------------------------------------------------ // TestSLERP // ------------------------------------------------------ void TestSLERP() { CDisplayWindow3D win("Example of SLERP animation", 640, 480); Scene::Ptr& theScene = win.get3DSceneAndLock(); win.setCameraAzimuthDeg(-50); win.setCameraElevationDeg(40); win.setCameraZoom(19); win.setCameraPointingToPoint(2, 2, 0); // Modify the scene: // ------------------------------------------------------ { auto obj = mrpt::opengl::CGridPlaneXY::Create(-20, 20, -20, 20, 0, 1); obj->setColor(0.4f, 0.4f, 0.4f); theScene->insert(obj); } // Initialize the start, end pose of the animation const TPose3D pose_a(0, 0, 0, 0.0_deg, 0.0_deg, 0.0_deg); const TPose3D pose_b(3, 4, 1, 120.0_deg, 40.0_deg, 50.0_deg); { // XYZ corner at A: auto obj = mrpt::opengl::stock_objects::CornerXYZSimple(1.0, 2.0); obj->setPose(pose_a); theScene->insert(obj); } { // XYZ corner at B: auto obj = mrpt::opengl::stock_objects::CornerXYZSimple(1.0, 2.0); obj->setPose(pose_b); theScene->insert(obj); } { // SLERP animated corner: auto obj = mrpt::opengl::stock_objects::CornerXYZSimple(1.0, 4.0); obj->setName("slerp_obj"); obj->setPose(pose_a); theScene->insert(obj); } // IMPORTANT!!! IF NOT UNLOCKED, THE WINDOW WILL NOT BE UPDATED! win.unlockAccess3DScene(); cout << "\n Close the window to exit.\n"; mrpt::system::CTicTac tic; static const double MOVE_PERIOD = 1.0; static const double MOVE_PERIOD2 = 2 * MOVE_PERIOD; while (win.isOpen()) { // Compute the time: double t = ::fmod(tic.Tac(), MOVE_PERIOD2); if (t < MOVE_PERIOD) t /= MOVE_PERIOD; else t = 1 - (t - MOVE_PERIOD) / MOVE_PERIOD; // SLERP & LERP interpolation: TPose3D pose_interp; mrpt::math::slerp(pose_a, pose_b, t, pose_interp); // Move the scene: Scene::Ptr& scene = win.get3DSceneAndLock(); auto obj1 = scene->getByName("slerp_obj"); obj1->setPose(pose_interp); // Show text: win.addTextMessage(5, 5, mrpt::format("t=%.03f", t), 0 /*id*/); // IMPORTANT!!! IF NOT UNLOCKED, THE WINDOW WILL NOT BE UPDATED! win.unlockAccess3DScene(); // Update window: win.forceRepaint(); std::this_thread::sleep_for(5ms); }; } // ------------------------------------------------------ // MAIN // ------------------------------------------------------ int main() { try { TestSLERP(); return 0; } catch (const std::exception& e) { std::cerr << "MRPT error: " << mrpt::exception_to_str(e) << std::endl; return -1; } }