Include dependency graph for CCriticalSection.h:
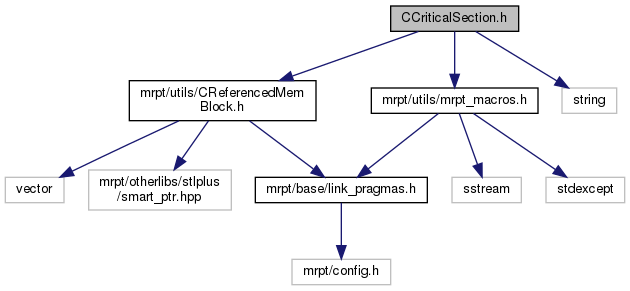
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | mrpt::synch::CAbstractMutex |
| class | mrpt::synch::CCriticalSection |
| This class provides simple critical sections functionality. More... | |
| class | mrpt::synch::CCriticalSectionRecursive |
| Recursive mutex: allow recursive locks by the owner thread. More... | |
| class | mrpt::synch::CCriticalSectionLocker |
| A class acquiring a CCriticalSection at its constructor, and releasing it at destructor. More... | |
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::utils | |
| Classes for serialization, sockets, ini-file manipulation, streams, list of properties-values, timewatch, extensions to STL. | |
| mrpt::synch | |
| This namespace provides multitask, synchronization utilities. | |
Macros | |
| #define | THREADSAFE_OPERATION(_CRITSECT_OBJ, CODE_TO_EXECUTE) |
| A macro for protecting a given piece of code with a critical section; for example: More... | |
Macro Definition Documentation
◆ THREADSAFE_OPERATION
| #define THREADSAFE_OPERATION | ( | _CRITSECT_OBJ, | |
| CODE_TO_EXECUTE | |||
| ) |
Value:
{ \
mrpt::synch::CCriticalSectionLocker lock(&_CRITSECT_OBJ); \
CODE_TO_EXECUTE \
}
A macro for protecting a given piece of code with a critical section; for example:
- See also
- CCriticalSectionLocker, CThreadSafeVariable
Definition at line 124 of file CCriticalSection.h.