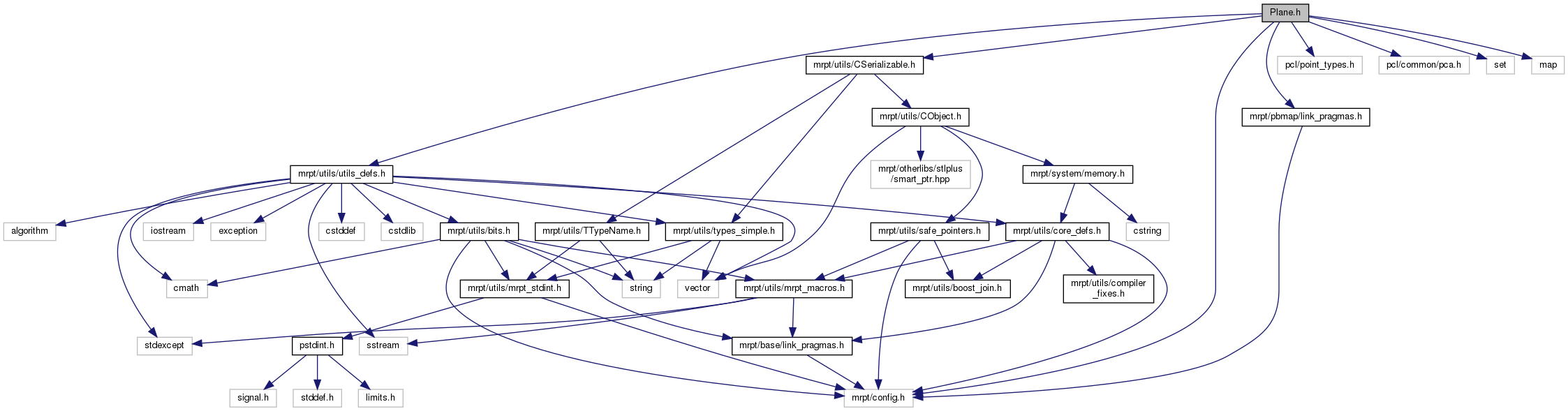
#include <mrpt/config.h>
#include <mrpt/utils/utils_defs.h>
#include <mrpt/pbmap/link_pragmas.h>
#include <mrpt/utils/CSerializable.h>
#include <pcl/point_types.h>
#include <pcl/common/pca.h>
#include <set>
#include <map>
Go to the source code of this file.
|
| | mrpt |
| | This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries.
|
| |
| | mrpt::pbmap |
| |
◆ USE_COMPLETNESS_HEURISTICS
| #define USE_COMPLETNESS_HEURISTICS 1 |
◆ USE_INFERRED_STRUCTURE
| #define USE_INFERRED_STRUCTURE 1 |
◆ DEFAULT_VECTOR
| std::vector<size_t> DEFAULT_VECTOR |
|
static |