#include <mrpt/utils/core_defs.h>#include <mrpt/obs/link_pragmas.h>#include <mrpt/obs/obs_frwds.h>#include <map>#include <string>
Include dependency graph for TMetricMapTypesRegistry.h:
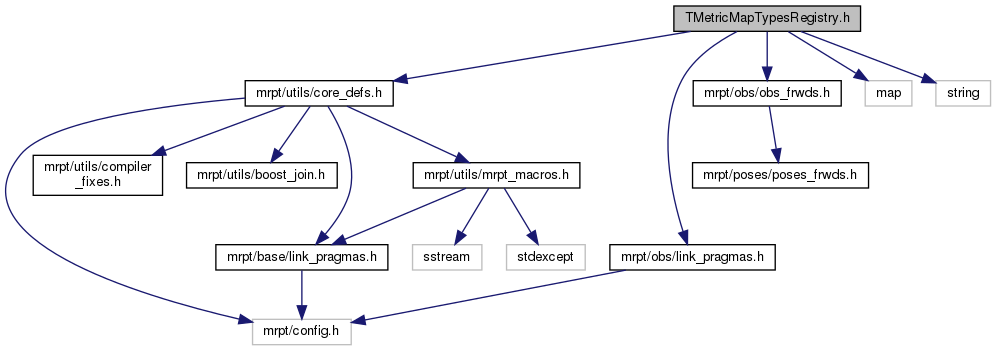
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| struct | mrpt::maps::internal::TMetricMapTypesRegistry |
| Class factory & registry for map classes. More... | |
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::maps | |
| mrpt::maps::internal | |
Macros | |
| #define | MAP_DEFINITION_START(_CLASS_NAME_, _LINKAGE_) |
| Add a MAP_DEFINITION_START() ... More... | |
| #define | MAP_DEFINITION_END(_CLASS_NAME_, _LINKAGE_) |
| #define | MAP_DEFINITION_REGISTER(_CLASSNAME_STRINGS, _CLASSNAME_WITH_NS) |
| Registers one map class into TMetricMapInitializer factory. More... | |
Typedefs | |
| typedef mrpt::maps::TMetricMapInitializer *(* | mrpt::maps::internal::MapDefCtorFunctor) (void) |
| typedef mrpt::maps::CMetricMap *(* | mrpt::maps::internal::MapCtorFromDefFunctor) (const mrpt::maps::TMetricMapInitializer &) |
Macro Definition Documentation
◆ MAP_DEFINITION_END
| #define MAP_DEFINITION_END | ( | _CLASS_NAME_, | |
| _LINKAGE_ | |||
| ) |
Value:
TMapDefinition();\
protected: \
void loadFromConfigFile_map_specific(const mrpt::utils::CConfigFileBase &source, const std::string §ionNamePrefix) MRPT_OVERRIDE; \
}; \
/** Returns default map definition initializer. See mrpt::maps::TMetricMapInitializer */ \
static mrpt::maps::TMetricMapInitializer* MapDefinition(); \
/** Constructor from a map definition structure: initializes the map and its parameters accordingly */ \
static _CLASS_NAME_* CreateFromMapDefinition(const mrpt::maps::TMetricMapInitializer &def); \
static mrpt::maps::CMetricMap* internal_CreateFromMapDefinition(const mrpt::maps::TMetricMapInitializer &def); \
/** ID used to initialize class registration (just ignore it) */ \
static const size_t m_private_map_register_id; \
/** @} */
Virtual base for specifying the kind and parameters of one map (normally, to be inserted into mrpt::m...
Definition: TMetricMapInitializer.h:32
This class allows loading and storing values and vectors of different types from a configuration text...
Definition: CConfigFileBase.h:33
This base class is used to provide a unified interface to files,memory buffers,..Please see the deriv...
Definition: CStream.h:38
Declares a virtual base class for all metric maps storage classes.
Definition: maps/CMetricMap.h:52
Definition at line 52 of file TMetricMapTypesRegistry.h.
◆ MAP_DEFINITION_REGISTER
| #define MAP_DEFINITION_REGISTER | ( | _CLASSNAME_STRINGS, | |
| _CLASSNAME_WITH_NS | |||
| ) |
Value:
const size_t _CLASSNAME_WITH_NS::m_private_map_register_id = mrpt::maps::internal::TMetricMapTypesRegistry::Instance().doRegister(_CLASSNAME_STRINGS,&_CLASSNAME_WITH_NS::MapDefinition,&_CLASSNAME_WITH_NS::internal_CreateFromMapDefinition); \
mrpt::maps::TMetricMapInitializer* _CLASSNAME_WITH_NS::MapDefinition() { return new _CLASSNAME_WITH_NS::TMapDefinition; } \
_CLASSNAME_WITH_NS* _CLASSNAME_WITH_NS::CreateFromMapDefinition(const mrpt::maps::TMetricMapInitializer &def) \
{ return dynamic_cast<_CLASSNAME_WITH_NS*>(_CLASSNAME_WITH_NS::internal_CreateFromMapDefinition(def)); }
Virtual base for specifying the kind and parameters of one map (normally, to be inserted into mrpt::m...
Definition: TMetricMapInitializer.h:32
static TMetricMapTypesRegistry & Instance()
Definition: TMetricMapTypesRegistry.cpp:22
size_t doRegister(const std::string &name, MapDefCtorFunctor func1, MapCtorFromDefFunctor func2)
Return the index of the class in the list (not important, just used as a trick to initialize static m...
Definition: TMetricMapTypesRegistry.cpp:28
Registers one map class into TMetricMapInitializer factory.
One or several alternative class names can be provided, separated with whitespaces or commas
Definition at line 69 of file TMetricMapTypesRegistry.h.
◆ MAP_DEFINITION_START
| #define MAP_DEFINITION_START | ( | _CLASS_NAME_, | |
| _LINKAGE_ | |||
| ) |
Value:
public: \
/** @name Map Definition Interface stuff (see mrpt::maps::TMetricMapInitializer) @{ */ \
struct _LINKAGE_ TMapDefinitionBase : public mrpt::maps::TMetricMapInitializer { \
TMapDefinitionBase() : TMetricMapInitializer(CLASS_ID(_CLASS_NAME_)) { } \
};\
struct _LINKAGE_ TMapDefinition : public TMapDefinitionBase { \
Virtual base for specifying the kind and parameters of one map (normally, to be inserted into mrpt::m...
Definition: TMetricMapInitializer.h:32
#define CLASS_ID(class_name)
Access to runtime class ID for a defined class name.
Definition: CObject.h:92
Add a MAP_DEFINITION_START() ...
MAP_DEFINITION_END() block inside the declaration of each metric map
Definition at line 44 of file TMetricMapTypesRegistry.h.