Detailed Description
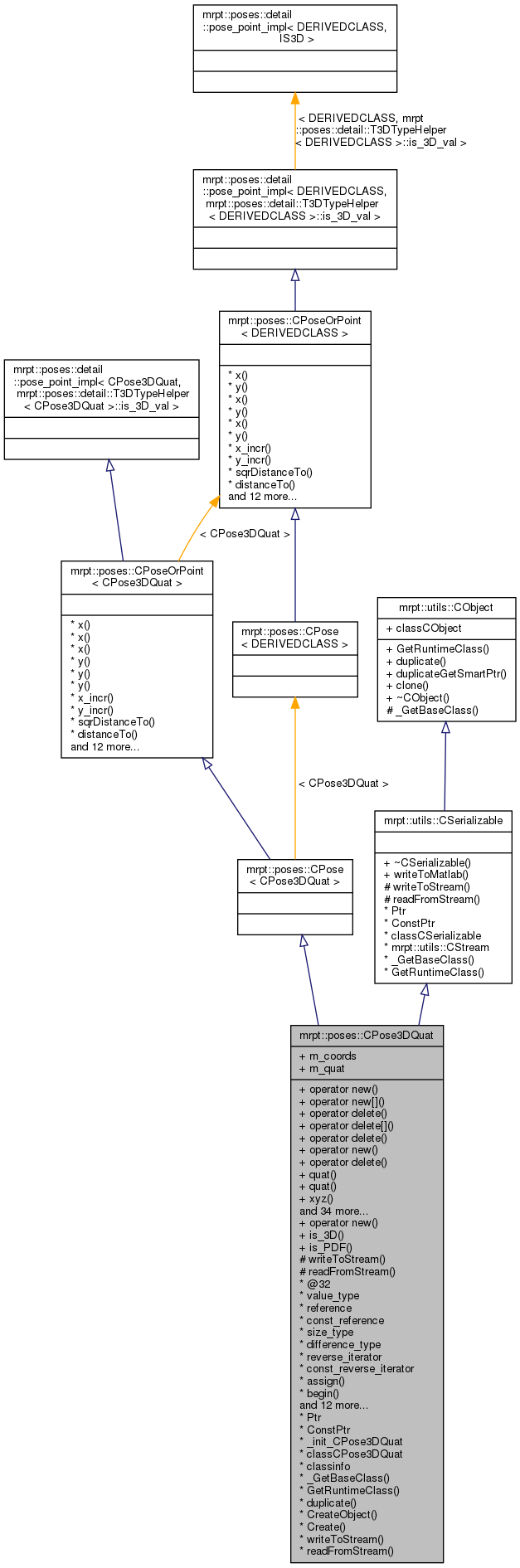
A class used to store a 3D pose as a translation (x,y,z) and a quaternion (qr,qx,qy,qz).
For a complete description of Points/Poses, see mrpt::poses::CPoseOrPoint, or refer to the 2D/3D Geometry tutorial in the wiki.
To access the translation use x(), y() and z(). To access the rotation, use CPose3DQuat::quat().
This class also behaves like a STL container, since it has begin(), end(), iterators, and can be accessed with the [] operator with indices running from 0 to 6 to access the [x y z qr qx qy qz] as if they were a vector. Thus, a CPose3DQuat can be used as a 7-vector anywhere the MRPT math functions expect any kind of vector.
This class and CPose3D are very similar, and they can be converted to the each other automatically via transformation constructors.
- See also
- CPose3D (for a class based on a 4x4 matrix instead of a quaternion), mrpt::math::TPose3DQuat, mrpt::poses::CPose3DQuatPDF for a probabilistic version of this class, mrpt::math::CQuaternion, CPoseOrPoint
Definition at line 41 of file CPose3DQuat.h.
#include <mrpt/poses/CPose3DQuat.h>
Classes | |
| struct | const_iterator |
| struct | iterator |
Public Types | |
| enum | { is_3D_val = 1 } |
| enum | { rotation_dimensions = 3 } |
| enum | { is_PDF_val = 1 } |
| typedef CPose3DQuat | type_value |
| Used to emulate CPosePDF types, for example, in mrpt::graphs::CNetworkOfPoses. More... | |
| typedef CPose3DQuat | mrpt_autotype |
| See ops_containers.h. More... | |
Public Member Functions | |
| void * | operator new (size_t size) |
| void * | operator new[] (size_t size) |
| void | operator delete (void *ptr) throw () |
| void | operator delete[] (void *ptr) throw () |
| void | operator delete (void *memory, void *ptr) throw () |
| void * | operator new (size_t size, const std::nothrow_t &) throw () |
| void | operator delete (void *ptr, const std::nothrow_t &) throw () |
| mrpt::math::CQuaternionDouble & | quat () |
| Read/Write access to the quaternion representing the 3D rotation. More... | |
| const mrpt::math::CQuaternionDouble & | quat () const |
| Read-only access to the quaternion representing the 3D rotation. More... | |
| mrpt::math::CArrayDouble< 3 > & | xyz () |
| Read/Write access to the translation vector in R^3. More... | |
| const mrpt::math::CArrayDouble< 3 > & | xyz () const |
| Read-only access to the translation vector in R^3. More... | |
| CPose3DQuat () | |
| Default constructor, initialize translation to zeros and quaternion to no rotation. More... | |
| CPose3DQuat (mrpt::math::TConstructorFlags_Quaternions) | |
| Constructor which left all the quaternion members un-initialized, for use when speed is critical; Use UNINITIALIZED_POSE as argument to this constructor. More... | |
| CPose3DQuat (TConstructorFlags_Poses) | |
| This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts. More... | |
| CPose3DQuat (const double x, const double y, const double z, const mrpt::math::CQuaternionDouble &q) | |
| Constructor with initilization of the pose - the quaternion is normalized to make sure it's unitary. More... | |
| CPose3DQuat (const CPose3D &p) | |
| Constructor from a CPose3D. More... | |
| CPose3DQuat (const mrpt::math::TPose3DQuat &p) | |
| Constructor from lightweight object. More... | |
| CPose3DQuat (const mrpt::math::CMatrixDouble44 &M) | |
| Constructor from a 4x4 homogeneous transformation matrix. More... | |
| void | getHomogeneousMatrix (mrpt::math::CMatrixDouble44 &out_HM) const |
| Returns the corresponding 4x4 homogeneous transformation matrix for the point(translation) or pose (translation+orientation). More... | |
| void | getAsVector (mrpt::math::CVectorDouble &v) const |
| Returns a 1x7 vector with [x y z qr qx qy qz]. More... | |
| void | getAsVector (mrpt::math::CArrayDouble< 7 > &v) const |
| This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts. More... | |
| void | composeFrom (const CPose3DQuat &A, const CPose3DQuat &B) |
Makes  this method is slightly more efficient than "this= A + B;" since it avoids the temporary object. More... this method is slightly more efficient than "this= A + B;" since it avoids the temporary object. More... | |
| void | inverseComposeFrom (const CPose3DQuat &A, const CPose3DQuat &B) |
Makes  this method is slightly more efficient than "this= A - B;" since it avoids the temporary object. More... this method is slightly more efficient than "this= A - B;" since it avoids the temporary object. More... | |
| void | composePoint (const double lx, const double ly, const double lz, double &gx, double &gy, double &gz, mrpt::math::CMatrixFixedNumeric< double, 3, 3 > *out_jacobian_df_dpoint=NULL, mrpt::math::CMatrixFixedNumeric< double, 3, 7 > *out_jacobian_df_dpose=NULL) const |
Computes the 3D point G such as  . More... . More... | |
| void | inverseComposePoint (const double gx, const double gy, const double gz, double &lx, double &ly, double &lz, mrpt::math::CMatrixFixedNumeric< double, 3, 3 > *out_jacobian_df_dpoint=NULL, mrpt::math::CMatrixFixedNumeric< double, 3, 7 > *out_jacobian_df_dpose=NULL) const |
Computes the 3D point L such as  . More... . More... | |
| template<class POINT1 , class POINT2 > | |
| void | composePoint (const POINT1 &L, POINT2 &G) const |
| Computes the 3D point G such as . More... | |
| template<class POINT1 , class POINT2 > | |
| void | inverseComposePoint (const POINT1 &G, POINT2 &L) const |
| Computes the 3D point L such as . More... | |
| CPoint3D | operator+ (const CPoint3D &L) const |
| Computes the 3D point G such as . More... | |
| mrpt::math::TPoint3D | operator+ (const mrpt::math::TPoint3D &L) const |
| Computes the 3D point G such as . More... | |
| virtual void | operator*= (const double s) |
| Scalar multiplication (all x y z qr qx qy qz elements are multiplied by the scalar). More... | |
| CPose3DQuat & | operator+= (const CPose3DQuat &b) |
Make  More... | |
| CPose3DQuat | operator+ (const CPose3DQuat &p) const |
Return the composed pose  More... | |
| CPose3DQuat & | operator-= (const CPose3DQuat &b) |
Make  More... | |
| CPose3DQuat | operator- (const CPose3DQuat &p) const |
Return the composed pose  More... | |
| void | inverse () |
| Convert this pose into its inverse, saving the result in itself. More... | |
| void | asString (std::string &s) const |
| Returns a human-readable textual representation of the object (eg: "[x y z qr qx qy qz]", angles in degrees.) More... | |
| std::string | asString () const |
| void | fromString (const std::string &s) |
| Set the current object value from a string generated by 'asString' (eg: "[0.02 1.04 -0.8 1 0 0 0]" ) More... | |
| const double & | operator[] (unsigned int i) const |
| Read only [] operator. More... | |
| double & | operator[] (unsigned int i) |
| Read/write [] operator. More... | |
| void | sphericalCoordinates (const mrpt::math::TPoint3D &point, double &out_range, double &out_yaw, double &out_pitch, mrpt::math::CMatrixFixedNumeric< double, 3, 3 > *out_jacob_dryp_dpoint=NULL, mrpt::math::CMatrixFixedNumeric< double, 3, 7 > *out_jacob_dryp_dpose=NULL) const |
| Computes the spherical coordinates of a 3D point as seen from the 6D pose specified by this object. More... | |
| const type_value & | getPoseMean () const |
| type_value & | getPoseMean () |
| void | setToNaN () MRPT_OVERRIDE |
| Set all data fields to quiet NaN. More... | |
| virtual mxArray * | writeToMatlab () const |
Introduces a pure virtual method responsible for writing to a mxArray Matlab object, typically a MATLAB struct whose contents are documented in each derived class. More... | |
| mrpt::utils::CObjectPtr | duplicateGetSmartPtr () const |
| Returns a copy of the object, indepently of its class, as a smart pointer (the newly created object will exist as long as any copy of this smart pointer). More... | |
| CObject * | clone () const |
| Cloning interface for smart pointers. More... | |
Static Public Member Functions | |
| static void * | operator new (size_t size, void *ptr) |
| static bool | is_3D () |
| static bool | is_PDF () |
Public Attributes | |
| mrpt::math::CArrayDouble< 3 > | m_coords |
| The translation vector [x,y,z]. More... | |
| mrpt::math::CQuaternionDouble | m_quat |
| The quaternion. More... | |
Static Public Attributes | |
| static const mrpt::utils::TRuntimeClassId | classCObject |
RTTI stuff <br> | |
| static const mrpt::utils::TRuntimeClassId | classCSerializable |
Protected Member Functions | |
CSerializable virtual methods | |
| void | writeToStream (mrpt::utils::CStream &out, int *getVersion) const |
| Introduces a pure virtual method responsible for writing to a CStream. More... | |
| void | readFromStream (mrpt::utils::CStream &in, int version) |
| Introduces a pure virtual method responsible for loading from a CStream This can not be used directly be users, instead use "stream >> object;" for reading it from a stream or "stream >> object_ptr;" if the class is unknown apriori. More... | |
STL-like methods and typedefs | |
| enum | { static_size = 7 } |
| typedef double | value_type |
| The type of the elements. More... | |
| typedef double & | reference |
| typedef const double & | const_reference |
| typedef std::size_t | size_type |
| typedef std::ptrdiff_t | difference_type |
| typedef std::reverse_iterator< iterator > | reverse_iterator |
| typedef std::reverse_iterator< const_iterator > | const_reverse_iterator |
| void | assign (const size_t N, const double val) |
| iterator | begin () |
| iterator | end () |
| const_iterator | begin () const |
| const_iterator | end () const |
| reverse_iterator | rbegin () |
| const_reverse_iterator | rbegin () const |
| reverse_iterator | rend () |
| const_reverse_iterator | rend () const |
| void | swap (CPose3DQuat &o) |
| static size_type | size () |
| static bool | empty () |
| static size_type | max_size () |
| static void | resize (const size_t n) |
RTTI stuff <br> | |
| typedef CPose3DQuatPtr | Ptr |
| typedef CPose3DQuatPtr | ConstPtr |
| static mrpt::utils::CLASSINIT | _init_CPose3DQuat |
| static mrpt::utils::TRuntimeClassId | classCPose3DQuat |
| static const mrpt::utils::TRuntimeClassId * | classinfo |
| static const mrpt::utils::TRuntimeClassId * | _GetBaseClass () |
| virtual const mrpt::utils::TRuntimeClassId * | GetRuntimeClass () const |
| Returns information about the class of an object in runtime. More... | |
| virtual mrpt::utils::CObject * | duplicate () const |
| Returns a copy of the object, indepently of its class. More... | |
| static mrpt::utils::CObject * | CreateObject () |
| static CPose3DQuatPtr | Create () |
| double | x () const |
| Common members of all points & poses classes. More... | |
| double & | x () |
| void | x (const double v) |
| double | y () const |
| double & | y () |
| void | y (const double v) |
| void | x_incr (const double v) |
| void | y_incr (const double v) |
| template<class OTHERCLASS > | |
| double | sqrDistanceTo (const CPoseOrPoint< OTHERCLASS > &b) const |
| Returns the squared euclidean distance to another pose/point: More... | |
| template<class OTHERCLASS > | |
| double | distanceTo (const CPoseOrPoint< OTHERCLASS > &b) const |
| Returns the Euclidean distance to another pose/point: More... | |
| double | distanceTo (const mrpt::math::TPoint3D &b) const |
| Returns the euclidean distance to a 3D point: More... | |
| double | distance2DToSquare (double ax, double ay) const |
| Returns the squared 2D distance from this pose/point to a 2D point (ignores Z, if it exists). More... | |
| double | distance3DToSquare (double ax, double ay, double az) const |
| Returns the squared 3D distance from this pose/point to a 3D point. More... | |
| double | distance2DTo (double ax, double ay) const |
| Returns the 2D distance from this pose/point to a 2D point (ignores Z, if it exists). More... | |
| double | distance3DTo (double ax, double ay, double az) const |
| Returns the 3D distance from this pose/point to a 3D point. More... | |
| double | norm () const |
Returns the euclidean norm of vector:  . More... . More... | |
| mrpt::math::CVectorDouble | getAsVectorVal () const |
| Return the pose or point as a 1xN vector with all the components (see derived classes for each implementation) More... | |
| mrpt::math::CMatrixDouble44 | getHomogeneousMatrixVal () const |
| Returns the corresponding 4x4 homogeneous transformation matrix for the point(translation) or pose (translation+orientation). More... | |
| void | getInverseHomogeneousMatrix (mrpt::math::CMatrixDouble44 &out_HM) const |
| Returns the corresponding 4x4 inverse homogeneous transformation matrix for this point or pose. More... | |
| mrpt::math::CMatrixDouble44 | getInverseHomogeneousMatrix () const |
| This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts. More... | |
| static bool | is3DPoseOrPoint () |
| Return true for poses or points with a Z component, false otherwise. More... | |
Member Typedef Documentation
◆ const_reference
| typedef const double& mrpt::poses::CPose3DQuat::const_reference |
Definition at line 251 of file CPose3DQuat.h.
◆ const_reverse_iterator
| typedef std::reverse_iterator<const_iterator> mrpt::poses::CPose3DQuat::const_reverse_iterator |
Definition at line 404 of file CPose3DQuat.h.
◆ ConstPtr
| typedef CPose3DQuatPtr mrpt::poses::CPose3DQuat::ConstPtr |
Definition at line 44 of file CPose3DQuat.h.
◆ difference_type
Definition at line 253 of file CPose3DQuat.h.
◆ mrpt_autotype
See ops_containers.h.
Definition at line 423 of file CPose3DQuat.h.
◆ Ptr
| typedef CPose3DQuatPtr mrpt::poses::CPose3DQuat::Ptr |
A typedef for the associated smart pointer
Definition at line 44 of file CPose3DQuat.h.
◆ reference
| typedef double& mrpt::poses::CPose3DQuat::reference |
Definition at line 250 of file CPose3DQuat.h.
◆ reverse_iterator
| typedef std::reverse_iterator<iterator> mrpt::poses::CPose3DQuat::reverse_iterator |
Definition at line 403 of file CPose3DQuat.h.
◆ size_type
| typedef std::size_t mrpt::poses::CPose3DQuat::size_type |
Definition at line 252 of file CPose3DQuat.h.
◆ type_value
Used to emulate CPosePDF types, for example, in mrpt::graphs::CNetworkOfPoses.
Definition at line 237 of file CPose3DQuat.h.
◆ value_type
| typedef double mrpt::poses::CPose3DQuat::value_type |
The type of the elements.
Definition at line 249 of file CPose3DQuat.h.
Member Enumeration Documentation
◆ anonymous enum
| anonymous enum |
| Enumerator | |
|---|---|
| is_3D_val | |
Definition at line 238 of file CPose3DQuat.h.
◆ anonymous enum
| anonymous enum |
| Enumerator | |
|---|---|
| rotation_dimensions | |
Definition at line 240 of file CPose3DQuat.h.
◆ anonymous enum
| anonymous enum |
| Enumerator | |
|---|---|
| is_PDF_val | |
Definition at line 241 of file CPose3DQuat.h.
◆ anonymous enum
| anonymous enum |
| Enumerator | |
|---|---|
| static_size | |
Definition at line 256 of file CPose3DQuat.h.
Constructor & Destructor Documentation
◆ CPose3DQuat() [1/7]
|
inline |
Default constructor, initialize translation to zeros and quaternion to no rotation.
Definition at line 63 of file CPose3DQuat.h.
◆ CPose3DQuat() [2/7]
|
inline |
Constructor which left all the quaternion members un-initialized, for use when speed is critical; Use UNINITIALIZED_POSE as argument to this constructor.
Definition at line 66 of file CPose3DQuat.h.
◆ CPose3DQuat() [3/7]
|
inline |
This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts.
Definition at line 68 of file CPose3DQuat.h.
◆ CPose3DQuat() [4/7]
|
inline |
Constructor with initilization of the pose - the quaternion is normalized to make sure it's unitary.
Definition at line 71 of file CPose3DQuat.h.
References mrpt::math::CQuaternion< T >::normalize().
◆ CPose3DQuat() [5/7]
|
explicit |
Constructor from a CPose3D.
Definition at line 27 of file CPose3DQuat.cpp.
◆ CPose3DQuat() [6/7]
|
inline |
Constructor from lightweight object.
Definition at line 77 of file CPose3DQuat.h.
◆ CPose3DQuat() [7/7]
|
explicit |
Constructor from a 4x4 homogeneous transformation matrix.
Definition at line 37 of file CPose3DQuat.cpp.
Member Function Documentation
◆ _GetBaseClass()
|
staticprotected |
◆ assign()
|
inline |
Definition at line 262 of file CPose3DQuat.h.
References val.
◆ asString() [1/2]
|
inline |
◆ asString() [2/2]
|
inline |
Returns a human-readable textual representation of the object (eg: "[x y z qr qx qy qz]", angles in degrees.)
- See also
- fromString
Definition at line 175 of file CPose3DQuat.h.
References mrpt::format().
◆ begin() [1/2]
|
inline |
Definition at line 405 of file CPose3DQuat.h.
◆ begin() [2/2]
|
inline |
Definition at line 407 of file CPose3DQuat.h.
◆ clone()
|
inlineinherited |
◆ composeFrom()
| void CPose3DQuat::composeFrom | ( | const CPose3DQuat & | A, |
| const CPose3DQuat & | B | ||
| ) |
Makes this method is slightly more efficient than "this= A + B;" since it avoids the temporary object.
Makes "this = A (+) B"; this method is slightly more efficient than "this= A + B;" since it avoids the temporary object.
- Note
- A or B can be "this" without problems.
- See also
- inverseComposeFrom, composePoint
- Note
- A or B can be "this" without problems.
Definition at line 75 of file CPose3DQuat.cpp.
References mrpt::math::CQuaternion< T >::crossProduct(), m_coords, m_quat, and mrpt::math::CQuaternion< T >::rotatePoint().
Referenced by operator+().
◆ composePoint() [1/2]
| void CPose3DQuat::composePoint | ( | const double | lx, |
| const double | ly, | ||
| const double | lz, | ||
| double & | gx, | ||
| double & | gy, | ||
| double & | gz, | ||
| mrpt::math::CMatrixFixedNumeric< double, 3, 3 > * | out_jacobian_df_dpoint = NULL, |
||
| mrpt::math::CMatrixFixedNumeric< double, 3, 7 > * | out_jacobian_df_dpose = NULL |
||
| ) | const |
Computes the 3D point G such as .
Definition at line 105 of file CPose3DQuat.cpp.
References mrpt::math::CMatrixFixedNumeric< T, NROWS, NCOLS >::loadFromArray(), m_coords, m_quat, MRPT_ALIGN16, mrpt::math::CQuaternion< T >::normalizationJacobian(), quat(), mrpt::math::CQuaternion< T >::r(), mrpt::math::CQuaternion< T >::rotatePoint(), mrpt::math::square(), mrpt::math::UNINITIALIZED_MATRIX, mrpt::math::CQuaternion< T >::x(), mrpt::math::CQuaternion< T >::y(), and mrpt::math::CQuaternion< T >::z().
Referenced by mrpt::slam::CRangeBearingKFSLAM::OnInverseObservationModel(), se3_l2_internal(), Pose3DQuatTests::test_composeAndInvComposePoint(), Pose3DQuatTests::test_composePoint_vs_CPose3D(), and Pose3DQuatTests::test_composePointJacob().
◆ composePoint() [2/2]
|
inline |
Computes the 3D point G such as .
POINT1 and POINT1 can be anything supporing [0],[1],[2].
- See also
- composePoint
Definition at line 125 of file CPose3DQuat.h.
References composePoint().
Referenced by composePoint().
◆ Create()
|
static |
◆ CreateObject()
|
static |
◆ distance2DTo()
|
inlineinherited |
Returns the 2D distance from this pose/point to a 2D point (ignores Z, if it exists).
Definition at line 165 of file CPoseOrPoint.h.
References mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::distance2DToSquare().
Referenced by mrpt::nav::PlannerRRT_SE2_TPS::solve().
◆ distance2DToSquare()
|
inlineinherited |
Returns the squared 2D distance from this pose/point to a 2D point (ignores Z, if it exists).
Definition at line 156 of file CPoseOrPoint.h.
References mrpt::math::square(), mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::x(), and mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::y().
Referenced by mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::distance2DTo().
◆ distance3DTo()
|
inlineinherited |
Returns the 3D distance from this pose/point to a 3D point.
Definition at line 168 of file CPoseOrPoint.h.
References mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::distance3DToSquare().
Referenced by mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::distanceTo(), mrpt::maps::CBeaconMap::internal_computeObservationLikelihood(), and mrpt::maps::CBeaconMap::internal_insertObservation().
◆ distance3DToSquare()
|
inlineinherited |
Returns the squared 3D distance from this pose/point to a 3D point.
Definition at line 159 of file CPoseOrPoint.h.
References mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::is3DPoseOrPoint(), mrpt::math::square(), mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::x(), and mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::y().
Referenced by mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::distance3DTo().
◆ distanceTo() [1/2]
|
inlineinherited |
Returns the Euclidean distance to another pose/point:
Definition at line 150 of file CPoseOrPoint.h.
References mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::sqrDistanceTo().
Referenced by ICPTests::align2scans(), mrpt::slam::CGridMapAligner::AlignPDF_robustMatch(), mrpt::graphslam::deciders::CFixedIntervalsNRD< GRAPH_T >::checkRegistrationCondition(), mrpt::maps::CBeacon::generateRingSOG(), mrpt::maps::CBeaconMap::internal_computeObservationLikelihood(), mrpt::maps::CLandmarksMap::internal_computeObservationLikelihood(), mrpt::maps::CBeaconMap::internal_insertObservation(), mrpt::hmtslam::CHMTSLAM::LSLAM_process_message_from_AA(), mrpt::hmtslam::CLSLAM_RBPF_2DLASER::processOneLMH(), ransac_data_assoc_run(), mrpt::slam::CRejectionSamplingRangeOnlyLocalization::RS_observationLikelihood(), mrpt::tfest::se2_l2_robust(), mrpt::maps::CBeaconMap::simulateBeaconReadings(), and mrpt::maps::CLandmarksMap::simulateBeaconReadings().
◆ distanceTo() [2/2]
|
inlineinherited |
Returns the euclidean distance to a 3D point:
Definition at line 171 of file CPoseOrPoint.h.
References mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::distance3DTo().
◆ duplicate()
|
virtual |
Returns a copy of the object, indepently of its class.
Implements mrpt::utils::CObject.
◆ duplicateGetSmartPtr()
|
inlineinherited |
Returns a copy of the object, indepently of its class, as a smart pointer (the newly created object will exist as long as any copy of this smart pointer).
Definition at line 140 of file CObject.h.
Referenced by mrpt::obs::CRawlog::addActions(), mrpt::slam::CIncrementalMapPartitioner::addMapFrame(), and mrpt::obs::CRawlog::addObservations().
◆ empty()
|
inlinestatic |
Definition at line 258 of file CPose3DQuat.h.
◆ end() [1/2]
|
inline |
Definition at line 406 of file CPose3DQuat.h.
References static_size.
◆ end() [2/2]
|
inline |
Definition at line 408 of file CPose3DQuat.h.
References static_size.
◆ fromString()
|
inline |
Set the current object value from a string generated by 'asString' (eg: "[0.02 1.04 -0.8 1 0 0 0]" )
- See also
- asString
- Exceptions
-
std::exception On invalid format
Definition at line 182 of file CPose3DQuat.h.
References ASSERTMSG_, mrpt::math::size(), and THROW_EXCEPTION.
◆ getAsVector() [1/2]
|
inline |
This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts.
Definition at line 91 of file CPose3DQuat.h.
◆ getAsVector() [2/2]
| void CPose3DQuat::getAsVector | ( | mrpt::math::CVectorDouble & | v | ) | const |
Returns a 1x7 vector with [x y z qr qx qy qz].
Definition at line 60 of file CPose3DQuat.cpp.
◆ getAsVectorVal()
|
inlineinherited |
Return the pose or point as a 1xN vector with all the components (see derived classes for each implementation)
Definition at line 181 of file CPoseOrPoint.h.
Referenced by mrpt::maps::COccupancyGridMap2D::laserScanSimulatorWithUncertainty(), Pose3DTests::test_compose(), Pose3DQuatTests::test_compose(), Pose3DRotVecTests::test_compose(), Pose3DTests::test_composeFrom(), Pose3DTests::test_composePoint(), Pose3DQuatTests::test_composePoint(), Pose3DRotVecTests::test_conversions(), Pose3DTests::test_ExpLnEqual(), TEST_F(), Pose3DQuatTests::test_fromYPRAndBack(), Pose3DQuatTests::test_invComposePoint(), Pose3DTests::test_inverse(), Pose3DPDFGaussTests::testChangeCoordsRef(), Pose3DQuatPDFGaussTests::testChangeCoordsRef(), Pose3DPDFGaussTests::testPoseComposition(), Pose3DPDFGaussTests::testPoseInverse(), Pose3DPDFGaussTests::testPoseInverseComposition(), and Pose3DPDFGaussTests::testToQuatPDFAndBack().
◆ getHomogeneousMatrix()
| void CPose3DQuat::getHomogeneousMatrix | ( | mrpt::math::CMatrixDouble44 & | out_HM | ) | const |
Returns the corresponding 4x4 homogeneous transformation matrix for the point(translation) or pose (translation+orientation).
- See also
- getInverseHomogeneousMatrix
Definition at line 49 of file CPose3DQuat.cpp.
References m_coords, m_quat, and mrpt::math::CQuaternion< T >::rotationMatrixNoResize().
◆ getHomogeneousMatrixVal()
|
inlineinherited |
Returns the corresponding 4x4 homogeneous transformation matrix for the point(translation) or pose (translation+orientation).
- See also
- getInverseHomogeneousMatrix
Definition at line 191 of file CPoseOrPoint.h.
References mrpt::math::UNINITIALIZED_MATRIX.
Referenced by mrpt::obs::CObservationStereoImages::getDescriptionAsText(), Pose3DQuatTests::test_copy(), Pose3DQuatTests::test_fromYPRAndBack(), and Pose3DQuatTests::test_unaryInverse().
◆ getInverseHomogeneousMatrix() [1/2]
|
inlineinherited |
This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts.
Definition at line 208 of file CPoseOrPoint.h.
References mrpt::math::UNINITIALIZED_MATRIX.
◆ getInverseHomogeneousMatrix() [2/2]
|
inlineinherited |
Returns the corresponding 4x4 inverse homogeneous transformation matrix for this point or pose.
- See also
- getHomogeneousMatrix
Definition at line 201 of file CPoseOrPoint.h.
References mrpt::math::homogeneousMatrixInverse().
Referenced by mrpt::poses::CPose3DRotVec::inverseComposeFrom(), and Pose3DTests::test_inverse().
◆ getPoseMean() [1/2]
|
inline |
Definition at line 245 of file CPose3DQuat.h.
◆ getPoseMean() [2/2]
|
inline |
Definition at line 244 of file CPose3DQuat.h.
◆ GetRuntimeClass()
|
virtual |
Returns information about the class of an object in runtime.
Reimplemented from mrpt::utils::CSerializable.
◆ inverse()
| void CPose3DQuat::inverse | ( | ) |
Convert this pose into its inverse, saving the result in itself.
- See also
- operator-
Definition at line 432 of file CPose3DQuat.cpp.
References inverseComposePoint(), m_coords, and m_quat.
Referenced by mrpt::poses::operator-().
◆ inverseComposeFrom()
| void CPose3DQuat::inverseComposeFrom | ( | const CPose3DQuat & | A, |
| const CPose3DQuat & | B | ||
| ) |
Makes this method is slightly more efficient than "this= A - B;" since it avoids the temporary object.
- Note
- A or B can be "this" without problems.
- See also
- composeFrom, composePoint
- Note
- A or B can be "this" without problems.
- See also
- composeFrom
Definition at line 92 of file CPose3DQuat.cpp.
References mrpt::math::CQuaternion< T >::crossProduct(), m_coords, m_quat, mrpt::math::CQuaternion< T >::r(), mrpt::math::CQuaternion< T >::rotatePoint(), mrpt::math::CQuaternion< T >::x(), mrpt::math::CQuaternion< T >::y(), and mrpt::math::CQuaternion< T >::z().
Referenced by operator-().
◆ inverseComposePoint() [1/2]
| void CPose3DQuat::inverseComposePoint | ( | const double | gx, |
| const double | gy, | ||
| const double | gz, | ||
| double & | lx, | ||
| double & | ly, | ||
| double & | lz, | ||
| mrpt::math::CMatrixFixedNumeric< double, 3, 3 > * | out_jacobian_df_dpoint = NULL, |
||
| mrpt::math::CMatrixFixedNumeric< double, 3, 7 > * | out_jacobian_df_dpose = NULL |
||
| ) | const |
Computes the 3D point L such as .
Computes the 3D point G such as .
- See also
- composePoint, composeFrom
- composeFrom
Definition at line 181 of file CPose3DQuat.cpp.
References mrpt::math::CQuaternion< T >::inverseRotatePoint(), mrpt::math::CMatrixFixedNumeric< T, NROWS, NCOLS >::loadFromArray(), m_coords, m_quat, MRPT_ALIGN16, mrpt::math::CQuaternion< T >::normalizationJacobian(), quat(), mrpt::math::CQuaternion< T >::r(), mrpt::math::square(), mrpt::math::UNINITIALIZED_MATRIX, mrpt::math::CQuaternion< T >::x(), mrpt::math::CQuaternion< T >::y(), and mrpt::math::CQuaternion< T >::z().
Referenced by generate_points(), inverse(), mrpt::poses::CPose3DQuatPDFGaussian::inverse(), mrpt::poses::CPose3DQuatPDFGaussianInf::inverse(), mrpt::vision::pinhole::projectPoints_with_distortion(), sphericalCoordinates(), Pose3DQuatTests::test_composeAndInvComposePoint(), Pose3DQuatTests::test_invComposePoint_vs_CPose3D(), and Pose3DQuatTests::test_invComposePointJacob().
◆ inverseComposePoint() [2/2]
|
inline |
Computes the 3D point L such as .
- See also
- inverseComposePoint
Definition at line 128 of file CPose3DQuat.h.
References inverseComposePoint().
Referenced by inverseComposePoint().
◆ is3DPoseOrPoint()
|
inlinestaticinherited |
Return true for poses or points with a Z component, false otherwise.
Definition at line 127 of file CPoseOrPoint.h.
Referenced by mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::distance3DToSquare(), mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::norm(), and mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::sqrDistanceTo().
◆ is_3D()
|
inlinestatic |
Definition at line 239 of file CPose3DQuat.h.
◆ is_PDF()
|
inlinestatic |
Definition at line 242 of file CPose3DQuat.h.
◆ max_size()
|
inlinestatic |
Definition at line 259 of file CPose3DQuat.h.
References static_size.
◆ norm()
|
inlineinherited |
Returns the euclidean norm of vector: .
Definition at line 174 of file CPoseOrPoint.h.
References mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::is3DPoseOrPoint(), mrpt::math::square(), mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::x(), and mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::y().
Referenced by mrpt::obs::CActionRobotMovement3D::computeFromOdometry_model6DOF(), mrpt::obs::CActionRobotMovement2D::computeFromOdometry_modelGaussian(), mrpt::obs::CActionRobotMovement2D::computeFromOdometry_modelThrun(), mrpt::obs::CActionRobotMovement2D::drawSingleSample_modelThrun(), mrpt::maps::detail::pointmap_traits< CColouredPointsMap >::internal_loadFromRangeScan3D_init(), mrpt::maps::CLandmarksMap::loadSiftFeaturesFromImageObservation(), mrpt::hmtslam::CLSLAM_RBPF_2DLASER::prediction_and_update_pfOptimalProposal(), mrpt::maps::CMultiMetricMapPDF::prediction_and_update_pfOptimalProposal(), mrpt::slam::CMetricMapBuilderRBPF::processActionObservation(), and mrpt::slam::CMetricMapBuilderICP::TDist::updateDistances().
◆ operator delete() [1/3]
Definition at line 44 of file CPose3DQuat.h.
◆ operator delete() [2/3]
Definition at line 44 of file CPose3DQuat.h.
◆ operator delete() [3/3]
|
inline | ||||||||||||||||||||
Definition at line 44 of file CPose3DQuat.h.
◆ operator delete[]()
Definition at line 44 of file CPose3DQuat.h.
◆ operator new() [1/3]
|
inline |
Definition at line 44 of file CPose3DQuat.h.
◆ operator new() [2/3]
|
inline | ||||||||||||||||||||
Definition at line 44 of file CPose3DQuat.h.
◆ operator new() [3/3]
Definition at line 44 of file CPose3DQuat.h.
◆ operator new[]()
|
inline |
Definition at line 44 of file CPose3DQuat.h.
◆ operator*=()
|
virtual |
Scalar multiplication (all x y z qr qx qy qz elements are multiplied by the scalar).
Definition at line 286 of file CPose3DQuat.cpp.
◆ operator+() [1/3]
Computes the 3D point G such as .
- See also
- composePoint
Definition at line 131 of file CPose3DQuat.h.
◆ operator+() [2/3]
|
inline |
◆ operator+() [3/3]
|
inline |
Computes the 3D point G such as .
- See also
- composePoint
Definition at line 134 of file CPose3DQuat.h.
◆ operator+=()
|
inline |
Make
Definition at line 140 of file CPose3DQuat.h.
◆ operator-()
|
inline |
Return the composed pose
Definition at line 162 of file CPose3DQuat.h.
References inverseComposeFrom().
◆ operator-=()
|
inline |
Make
Definition at line 155 of file CPose3DQuat.h.
◆ operator[]() [1/2]
|
inline |
Read/write [] operator.
Definition at line 207 of file CPose3DQuat.h.
◆ operator[]() [2/2]
|
inline |
Read only [] operator.
Definition at line 191 of file CPose3DQuat.h.
◆ quat() [1/2]
|
inline |
Read/Write access to the quaternion representing the 3D rotation.
Definition at line 52 of file CPose3DQuat.h.
Referenced by composePoint(), mrpt::poses::CPose3DQuatPDFGaussian::copyFrom(), mrpt::poses::CPose3DPDFGaussian::copyFrom(), mrpt::hwdrivers::CImageGrabber_FlyCapture2::getObservation(), mrpt::poses::CPose3DQuatPDFGaussian::inverse(), mrpt::poses::CPose3DQuatPDFGaussianInf::inverse(), inverseComposePoint(), mrpt::poses::CPose3DPDF::jacobiansPoseComposition(), mrpt::poses::CPose3DQuatPDF::jacobiansPoseComposition(), mrpt::poses::operator==(), mrpt::topography::path_from_rtk_gps(), mrpt::poses::CPose3DQuatPDFGaussian::saveToTextFile(), mrpt::poses::CPose3DQuatPDFGaussianInf::saveToTextFile(), setToNaN(), mrpt::math::slerp(), Pose3DQuatTests::test_invComposePointJacob(), and QuaternionTests::test_toYPRAndBack().
◆ quat() [2/2]
|
inline |
Read-only access to the quaternion representing the 3D rotation.
Definition at line 54 of file CPose3DQuat.h.
◆ rbegin() [1/2]
|
inline |
Definition at line 409 of file CPose3DQuat.h.
◆ rbegin() [2/2]
|
inline |
Definition at line 410 of file CPose3DQuat.h.
◆ readFromStream()
|
protectedvirtual |
Introduces a pure virtual method responsible for loading from a CStream This can not be used directly be users, instead use "stream >> object;" for reading it from a stream or "stream >> object_ptr;" if the class is unknown apriori.
- Parameters
-
in The input binary stream where the object data must read from. version The version of the object stored in the stream: use this version number in your code to know how to read the incoming data.
- Exceptions
-
std::exception On any error, see CStream::ReadBuffer
- See also
- CStream
Implements mrpt::utils::CSerializable.
Definition at line 315 of file CPose3DQuat.cpp.
References m_coords, m_quat, MRPT_THROW_UNKNOWN_SERIALIZATION_VERSION, and version.
◆ rend() [1/2]
|
inline |
Definition at line 411 of file CPose3DQuat.h.
References begin().
◆ rend() [2/2]
|
inline |
Definition at line 412 of file CPose3DQuat.h.
References begin().
◆ resize()
|
inlinestatic |
Definition at line 260 of file CPose3DQuat.h.
References mrpt::format(), and static_size.
◆ setToNaN()
|
virtual |
Set all data fields to quiet NaN.
Implements mrpt::poses::CPoseOrPoint< DERIVEDCLASS >.
Definition at line 445 of file CPose3DQuat.cpp.
◆ size()
|
inlinestatic |
Definition at line 257 of file CPose3DQuat.h.
References static_size.
Referenced by mrpt::slam::CRangeBearingKFSLAM::OnObservationModel().
◆ sphericalCoordinates()
| void CPose3DQuat::sphericalCoordinates | ( | const mrpt::math::TPoint3D & | point, |
| double & | out_range, | ||
| double & | out_yaw, | ||
| double & | out_pitch, | ||
| mrpt::math::CMatrixFixedNumeric< double, 3, 3 > * | out_jacob_dryp_dpoint = NULL, |
||
| mrpt::math::CMatrixFixedNumeric< double, 3, 7 > * | out_jacob_dryp_dpose = NULL |
||
| ) | const |
Computes the spherical coordinates of a 3D point as seen from the 6D pose specified by this object.
For the coordinate system see the top of this page. If the matrix pointers are not NULL, the Jacobians will be also computed for the range-yaw-pitch variables wrt the passed 3D point and this 7D pose.
Definition at line 332 of file CPose3DQuat.cpp.
References inverseComposePoint(), local, mrpt::math::square(), THROW_EXCEPTION, mrpt::math::TPoint3D::x, mrpt::math::TPoint3D::y, and mrpt::math::TPoint3D::z.
Referenced by mrpt::slam::CRangeBearingKFSLAM::OnObservationJacobians(), mrpt::slam::CRangeBearingKFSLAM::OnObservationModel(), and Pose3DQuatTests::test_sphericalCoords().
◆ sqrDistanceTo()
|
inlineinherited |
Returns the squared euclidean distance to another pose/point:
Definition at line 130 of file CPoseOrPoint.h.
References mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::is3DPoseOrPoint(), mrpt::math::square(), mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::x(), and mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::y().
Referenced by mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::distanceTo().
◆ swap()
|
inline |
Definition at line 415 of file CPose3DQuat.h.
◆ writeToMatlab()
|
inlinevirtualinherited |
Introduces a pure virtual method responsible for writing to a mxArray Matlab object, typically a MATLAB struct whose contents are documented in each derived class.
- Returns
- A new
mxArray(caller is responsible of memory freeing) or NULL is class does not support conversion to MATLAB.
Definition at line 79 of file CSerializable.h.
◆ writeToStream()
|
protectedvirtual |
Introduces a pure virtual method responsible for writing to a CStream.
This can not be used directly be users, instead use "stream << object;" for writing it to a stream.
- Parameters
-
out The output binary stream where object must be dumped. getVersion If NULL, the object must be dumped. If not, only the version of the object dump must be returned in this pointer. This enables the versioning of objects dumping and backward compatibility with previously stored data.
- Exceptions
-
std::exception On any error, see CStream::WriteBuffer
- See also
- CStream
Implements mrpt::utils::CSerializable.
Definition at line 301 of file CPose3DQuat.cpp.
◆ x() [1/3]
|
inlineinherited |
Definition at line 116 of file CPoseOrPoint.h.
◆ x() [2/3]
|
inlineinherited |
Common members of all points & poses classes.
< Get X coord.
Definition at line 113 of file CPoseOrPoint.h.
Referenced by mrpt::nav::CPTG_RobotShape_Circular::add_robotShape_to_setOfLines(), mrpt::slam::CGridMapAligner::AlignPDF_robustMatch(), mrpt::poses::CPose2D::asString(), mrpt::graphs::detail::graph_ops< graph_t >::auxEuclid2Dist(), mrpt::poses::CPoint2DPDFGaussian::bayesianFusion(), mrpt::poses::CPointPDFSOG::bayesianFusion(), mrpt::poses::CPointPDFGaussian::bayesianFusion(), mrpt::poses::CPosePDFGaussian::bayesianFusion(), mrpt::poses::CPosePDFGaussianInf::bayesianFusion(), mrpt::maps::CColouredPointsMap::colourFromObservation(), mrpt::obs::CActionRobotMovement3D::computeFromOdometry_model6DOF(), mrpt::obs::CActionRobotMovement2D::computeFromOdometry_modelThrun(), mrpt::maps::COccupancyGridMap2D::computeLikelihoodField_Thrun(), mrpt::maps::CBeaconMap::computeMatchingWith3DLandmarks(), mrpt::maps::CLandmarksMap::computeMatchingWith3DLandmarks(), mrpt::vision::computeMsd(), mrpt::maps::COccupancyGridMap2D::computeObservationLikelihood_CellsDifference(), mrpt::poses::CPose3DQuatPDFGaussian::copyFrom(), mrpt::poses::CPose3DPDFGaussian::copyFrom(), mrpt::poses::CPosePDFParticles::copyFrom(), mrpt::poses::CPoint3D::CPoint3D(), mrpt::poses::CPose2D::CPose2D(), mrpt::poses::CPose3DRotVec::CPose3DRotVec(), mrpt::hwdrivers::CIbeoLuxETH::dataCollection(), mrpt::maps::CPointsMap::determineMatching2D(), mrpt::nav::PoseDistanceMetric< TNodeSE2_TP >::distance(), mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::distance2DToSquare(), mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::distance3DToSquare(), mrpt::poses::CPoseRandomSampler::do_sample_2D(), mrpt::poses::CPoseRandomSampler::do_sample_3D(), mrpt::graphs::detail::CVisualizer< CPOSE, MAPS_IMPLEMENTATION, NODE_ANNOTATIONS, EDGE_ANNOTATIONS >::drawEdgeRelPoses(), mrpt::graphs::detail::CMRVisualizer< CPOSE, MAPS_IMPLEMENTATION, TMRSlamNodeAnnotations, EDGE_ANNOTATIONS >::drawEdges(), mrpt::graphs::detail::CVisualizer< CPOSE, MAPS_IMPLEMENTATION, NODE_ANNOTATIONS, EDGE_ANNOTATIONS >::drawEdges(), mrpt::poses::CPose3DPDFGaussian::drawManySamples(), mrpt::poses::CPose3DPDFGaussianInf::drawManySamples(), mrpt::poses::CPosePDFGaussian::drawManySamples(), mrpt::poses::CPosePDFGaussianInf::drawManySamples(), mrpt::poses::CPoint2DPDFGaussian::drawSingleSample(), mrpt::poses::CPointPDFGaussian::drawSingleSample(), mrpt::poses::CPointPDFSOG::drawSingleSample(), mrpt::poses::CPosePDFGaussian::drawSingleSample(), mrpt::poses::CPosePDFGaussianInf::drawSingleSample(), mrpt::poses::CPose3DPDFGaussian::drawSingleSample(), mrpt::poses::CPose3DPDFGaussianInf::drawSingleSample(), mrpt::obs::CActionRobotMovement2D::drawSingleSample_modelThrun(), mrpt::hmtslam::CHierarchicalMapMHPartition::dumpAsText(), mrpt::poses::SE_traits< 2 >::exp(), mrpt::poses::CPose3D::exp(), mrpt::obs::CActionRobotMovement2D::fastDrawSingleSample_modelGaussian(), mrpt::vision::frameJac(), mrpt::poses::CPose2D::fromString(), Pose3DTests::func_inv_compose_point(), Pose3DQuatTests::func_inv_compose_point(), func_laserSimul_callback(), mrpt::maps::CBeacon::generateObservationModelDistribution(), mrpt::maps::CBeacon::generateRingSOG(), mrpt::maps::CBeacon::getAs3DObject(), mrpt::slam::CRangeBearingKFSLAM::getAs3DObject(), mrpt::slam::CRangeBearingKFSLAM2D::getAs3DObject(), mrpt::hmtslam::CHierarchicalMapMHPartition::getAs3DScene(), mrpt::hmtslam::CLocalMetricHypothesis::getAs3DScene(), mrpt::slam::CIncrementalMapPartitioner::getAs3DScene(), mrpt::maps::CBeacon::getAsMatlabDrawCommands(), mrpt::math::TLine2D::getAsPose2D(), mrpt::poses::CPoint< DERIVEDCLASS >::getHomogeneousMatrix(), mrpt::poses::CRobot2DPoseEstimator::getLatestRobotPose(), mrpt::hwdrivers::CImageGrabber_FlyCapture2::getObservation(), mrpt::maps::CLandmark::getPose(), mrpt::opengl::graph_tools::graph_visualize(), mrpt::slam::CICP::ICP3D_Method_Classic(), mrpt::slam::CICP::ICP_Method_Classic(), mrpt::slam::CICP::ICP_Method_LM(), mrpt::maps::COctoMapBase< octree_t, octree_node_t >::internal_build_PointCloud_for_observation(), mrpt::maps::CBeaconMap::internal_computeObservationLikelihood(), mrpt::maps::CReflectivityGridMap2D::internal_computeObservationLikelihood(), mrpt::maps::CLandmarksMap::internal_computeObservationLikelihood(), mrpt::maps::CColouredOctoMap::internal_insertObservation(), mrpt::maps::CBeaconMap::internal_insertObservation(), mrpt::maps::CGasConcentrationGridMap2D::internal_insertObservation(), mrpt::maps::COccupancyGridMap2D::internal_insertObservation(), mrpt::maps::CReflectivityGridMap2D::internal_insertObservation(), mrpt::maps::CWirelessPowerGridMap2D::internal_insertObservation(), mrpt::poses::CPose3DQuatPDFGaussian::inverse(), mrpt::poses::CPose3DQuatPDFGaussianInf::inverse(), mrpt::poses::CPosePDFGaussian::inverse(), mrpt::poses::CPosePDFGaussianInf::inverse(), mrpt::poses::CPosePDFGaussian::inverseComposition(), jacob_dA_eps_D_p_deps(), mrpt::poses::CPosePDF::jacobiansPoseComposition(), mrpt::poses::CPose3DQuatPDF::jacobiansPoseComposition(), mrpt::slam::KLF_loadBinFromParticle(), mrpt::maps::COccupancyGridMap2D::laserScanSimulator(), mrpt::poses::SE_traits< 2 >::ln(), mrpt::maps::CLandmarksMap::loadSiftFeaturesFromStereoImageObservation(), mrpt::hmtslam::CLSLAM_RBPF_2DLASER::loadTPathBinFromPath(), mrpt::hmtslam::CHMTSLAM::LSLAM_process_message_from_AA(), mrpt::poses::CPoint2DPDFGaussian::mahalanobisDistanceTo(), mrpt::poses::CPointPDFGaussian::mahalanobisDistanceTo(), mrpt::poses::CPoint2DPDFGaussian::mahalanobisDistanceToPoint(), mrpt::poses::CPosePDFSOG::mergeModes(), mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::norm(), mrpt::slam::CRangeBearingKFSLAM2D::OnGetAction(), mrpt::slam::CRangeBearingKFSLAM2D::OnObservationModel(), mrpt::slam::CRangeBearingKFSLAM2D::OnTransitionModel(), mrpt::poses::operator!=(), mrpt::poses::CPose2D::operator+(), mrpt::poses::operator+(), mrpt::poses::operator==(), mrpt::topography::path_from_rtk_gps(), mrpt::opengl::CSetOfObjects::posePDF2opengl(), mrpt::maps::CMultiMetricMapPDF::prediction_and_update_pfOptimalProposal(), mrpt::hwdrivers::CSkeletonTracker::processPreviewNone(), mrpt::poses::CPoint2DPDFGaussian::productIntegralWith(), mrpt::poses::CPointPDFGaussian::productIntegralWith(), mrpt::poses::CPointPDFGaussian::productIntegralWith2D(), mrpt::math::project2D(), mrpt::vision::projectMatchedFeatures(), ransac_data_assoc_run(), mrpt::opengl::CRenderizable::readFromStreamRender(), mrpt::opengl::COpenGLViewport::render(), mrpt::slam::CRejectionSamplingRangeOnlyLocalization::RS_drawFromProposal(), mrpt::slam::CRangeBearingKFSLAM2D::saveMapAndPath2DRepresentationAsMATLABFile(), mrpt::poses::CPoint2DPDFGaussian::saveToTextFile(), mrpt::poses::CPointPDFGaussian::saveToTextFile(), mrpt::poses::CPose3DPDFGaussian::saveToTextFile(), mrpt::poses::CPose3DPDFGaussianInf::saveToTextFile(), mrpt::poses::CPose3DQuatPDFGaussian::saveToTextFile(), mrpt::poses::CPose3DQuatPDFGaussianInf::saveToTextFile(), mrpt::poses::CPosePDFGaussian::saveToTextFile(), mrpt::poses::CPosePDFGaussianInf::saveToTextFile(), se3_l2_internal(), mrpt::tfest::se3_l2_robust(), mrpt::opengl::CRenderizable::setPose(), mrpt::maps::CLandmark::setPose(), mrpt::math::slerp(), mrpt::nav::PlannerRRT_SE2_TPS::solve(), mrpt::maps::COccupancyGridMap2D::sonarSimulator(), mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::sqrDistanceTo(), mrpt::vision::StereoObs2BRObs(), Pose3DTests::test_composePoint(), Pose3DTests::test_to_from_2d(), mrpt::maps::COctoMapBase< octomap::ColorOcTree, octomap::ColorOcTreeNode >::TInsertionOptions::TInsertionOptions(), mrpt::opengl::CDisk::traceRay(), mrpt::opengl::CSphere::traceRay(), mrpt::nav::PlannerTPS_VirtualBase::transformPointcloudWithSquareClipping(), mrpt::graphs::detail::graph_ops< graph_t >::write_EDGE_line(), mrpt::poses::CPosePDFGaussianInf::writeToStream(), and mrpt::opengl::CRenderizable::writeToStreamRender().
◆ x() [3/3]
|
inlineinherited |
- Parameters
-
v Set X coord.
Definition at line 119 of file CPoseOrPoint.h.
◆ x_incr()
|
inlineinherited |
- Parameters
-
v X+=v
Definition at line 122 of file CPoseOrPoint.h.
Referenced by mrpt::slam::CICP::ICP_Method_Classic(), and mrpt::maps::CBeaconMap::internal_insertObservation().
◆ xyz() [1/2]
|
inline |
Read/Write access to the translation vector in R^3.
Definition at line 57 of file CPose3DQuat.h.
◆ xyz() [2/2]
|
inline |
Read-only access to the translation vector in R^3.
Definition at line 59 of file CPose3DQuat.h.
◆ y() [1/3]
|
inlineinherited |
Definition at line 117 of file CPoseOrPoint.h.
◆ y() [2/3]
|
inlineinherited |
< Get Y coord.
Definition at line 114 of file CPoseOrPoint.h.
Referenced by mrpt::nav::CPTG_RobotShape_Circular::add_robotShape_to_setOfLines(), mrpt::slam::CGridMapAligner::AlignPDF_robustMatch(), mrpt::poses::CPoint< DERIVEDCLASS >::asString(), mrpt::poses::CPose2D::asString(), mrpt::graphs::detail::graph_ops< graph_t >::auxEuclid2Dist(), mrpt::poses::CPoint2DPDFGaussian::bayesianFusion(), mrpt::poses::CPointPDFSOG::bayesianFusion(), mrpt::poses::CPointPDFGaussian::bayesianFusion(), mrpt::poses::CPosePDFGaussian::bayesianFusion(), mrpt::poses::CPosePDFGaussianInf::bayesianFusion(), mrpt::maps::CColouredPointsMap::colourFromObservation(), mrpt::obs::CActionRobotMovement3D::computeFromOdometry_model6DOF(), mrpt::obs::CActionRobotMovement2D::computeFromOdometry_modelThrun(), mrpt::maps::COccupancyGridMap2D::computeLikelihoodField_Thrun(), mrpt::maps::CBeaconMap::computeMatchingWith3DLandmarks(), mrpt::maps::CLandmarksMap::computeMatchingWith3DLandmarks(), mrpt::vision::computeMsd(), mrpt::maps::COccupancyGridMap2D::computeObservationLikelihood_CellsDifference(), mrpt::poses::CPose3DQuatPDFGaussian::copyFrom(), mrpt::poses::CPose3DPDFGaussian::copyFrom(), mrpt::poses::CPosePDFParticles::copyFrom(), mrpt::poses::CPose2D::CPose2D(), mrpt::poses::CPose3DRotVec::CPose3DRotVec(), mrpt::hwdrivers::CIbeoLuxETH::dataCollection(), mrpt::maps::CPointsMap::determineMatching2D(), mrpt::nav::PoseDistanceMetric< TNodeSE2_TP >::distance(), mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::distance2DToSquare(), mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::distance3DToSquare(), mrpt::poses::CPoseRandomSampler::do_sample_2D(), mrpt::poses::CPoseRandomSampler::do_sample_3D(), mrpt::graphs::detail::CVisualizer< CPOSE, MAPS_IMPLEMENTATION, NODE_ANNOTATIONS, EDGE_ANNOTATIONS >::drawEdgeRelPoses(), mrpt::graphs::detail::CMRVisualizer< CPOSE, MAPS_IMPLEMENTATION, TMRSlamNodeAnnotations, EDGE_ANNOTATIONS >::drawEdges(), mrpt::graphs::detail::CVisualizer< CPOSE, MAPS_IMPLEMENTATION, NODE_ANNOTATIONS, EDGE_ANNOTATIONS >::drawEdges(), mrpt::poses::CPose3DPDFGaussian::drawManySamples(), mrpt::poses::CPose3DPDFGaussianInf::drawManySamples(), mrpt::poses::CPosePDFGaussian::drawManySamples(), mrpt::poses::CPosePDFGaussianInf::drawManySamples(), mrpt::poses::CPoint2DPDFGaussian::drawSingleSample(), mrpt::poses::CPointPDFGaussian::drawSingleSample(), mrpt::poses::CPointPDFSOG::drawSingleSample(), mrpt::poses::CPosePDFGaussian::drawSingleSample(), mrpt::poses::CPosePDFGaussianInf::drawSingleSample(), mrpt::poses::CPose3DPDFGaussian::drawSingleSample(), mrpt::poses::CPose3DPDFGaussianInf::drawSingleSample(), mrpt::obs::CActionRobotMovement2D::drawSingleSample_modelThrun(), mrpt::hmtslam::CHierarchicalMapMHPartition::dumpAsText(), mrpt::poses::SE_traits< 2 >::exp(), mrpt::poses::CPose3D::exp(), mrpt::obs::CActionRobotMovement2D::fastDrawSingleSample_modelGaussian(), mrpt::vision::frameJac(), mrpt::poses::CPose2D::fromString(), Pose3DTests::func_inv_compose_point(), Pose3DQuatTests::func_inv_compose_point(), func_laserSimul_callback(), mrpt::maps::CBeacon::generateObservationModelDistribution(), mrpt::maps::CBeacon::generateRingSOG(), mrpt::maps::CBeacon::getAs3DObject(), mrpt::slam::CRangeBearingKFSLAM::getAs3DObject(), mrpt::slam::CRangeBearingKFSLAM2D::getAs3DObject(), mrpt::hmtslam::CHierarchicalMapMHPartition::getAs3DScene(), mrpt::hmtslam::CLocalMetricHypothesis::getAs3DScene(), mrpt::slam::CIncrementalMapPartitioner::getAs3DScene(), mrpt::maps::CBeacon::getAsMatlabDrawCommands(), mrpt::math::TLine2D::getAsPose2D(), mrpt::poses::CPoint< DERIVEDCLASS >::getHomogeneousMatrix(), mrpt::poses::CRobot2DPoseEstimator::getLatestRobotPose(), mrpt::hwdrivers::CImageGrabber_FlyCapture2::getObservation(), mrpt::maps::CLandmark::getPose(), mrpt::opengl::graph_tools::graph_visualize(), mrpt::slam::CICP::ICP3D_Method_Classic(), mrpt::slam::CICP::ICP_Method_Classic(), mrpt::slam::CICP::ICP_Method_LM(), mrpt::maps::COctoMapBase< octree_t, octree_node_t >::internal_build_PointCloud_for_observation(), mrpt::maps::CBeaconMap::internal_computeObservationLikelihood(), mrpt::maps::CReflectivityGridMap2D::internal_computeObservationLikelihood(), mrpt::maps::CLandmarksMap::internal_computeObservationLikelihood(), mrpt::maps::CColouredOctoMap::internal_insertObservation(), mrpt::maps::CBeaconMap::internal_insertObservation(), mrpt::maps::CGasConcentrationGridMap2D::internal_insertObservation(), mrpt::maps::COccupancyGridMap2D::internal_insertObservation(), mrpt::maps::CReflectivityGridMap2D::internal_insertObservation(), mrpt::maps::CWirelessPowerGridMap2D::internal_insertObservation(), mrpt::poses::CPose3DQuatPDFGaussian::inverse(), mrpt::poses::CPose3DQuatPDFGaussianInf::inverse(), mrpt::poses::CPosePDFGaussian::inverse(), mrpt::poses::CPosePDFGaussianInf::inverse(), mrpt::poses::CPosePDFGaussian::inverseComposition(), jacob_dA_eps_D_p_deps(), mrpt::poses::CPosePDF::jacobiansPoseComposition(), mrpt::poses::CPose3DQuatPDF::jacobiansPoseComposition(), mrpt::slam::KLF_loadBinFromParticle(), mrpt::maps::COccupancyGridMap2D::laserScanSimulator(), mrpt::poses::SE_traits< 2 >::ln(), mrpt::hmtslam::CLSLAM_RBPF_2DLASER::loadTPathBinFromPath(), mrpt::hmtslam::CHMTSLAM::LSLAM_process_message_from_AA(), mrpt::poses::CPoint2DPDFGaussian::mahalanobisDistanceTo(), mrpt::poses::CPointPDFGaussian::mahalanobisDistanceTo(), mrpt::poses::CPoint2DPDFGaussian::mahalanobisDistanceToPoint(), mrpt::poses::CPosePDFSOG::mergeModes(), mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::norm(), mrpt::slam::CRangeBearingKFSLAM2D::OnGetAction(), mrpt::slam::CRangeBearingKFSLAM2D::OnObservationModel(), mrpt::slam::CRangeBearingKFSLAM2D::OnTransitionModel(), mrpt::poses::operator!=(), mrpt::poses::CPose2D::operator+(), mrpt::poses::operator+(), mrpt::poses::operator==(), mrpt::topography::path_from_rtk_gps(), mrpt::opengl::CSetOfObjects::posePDF2opengl(), mrpt::maps::CMultiMetricMapPDF::prediction_and_update_pfOptimalProposal(), mrpt::hwdrivers::CSkeletonTracker::processPreviewNone(), mrpt::poses::CPoint2DPDFGaussian::productIntegralWith(), mrpt::poses::CPointPDFGaussian::productIntegralWith(), mrpt::poses::CPointPDFGaussian::productIntegralWith2D(), mrpt::math::project2D(), ransac_data_assoc_run(), mrpt::opengl::CRenderizable::readFromStreamRender(), mrpt::opengl::COpenGLViewport::render(), mrpt::slam::CRejectionSamplingRangeOnlyLocalization::RS_drawFromProposal(), mrpt::slam::CRangeBearingKFSLAM2D::saveMapAndPath2DRepresentationAsMATLABFile(), mrpt::poses::CPoint2DPDFGaussian::saveToTextFile(), mrpt::poses::CPointPDFGaussian::saveToTextFile(), mrpt::poses::CPose3DPDFGaussian::saveToTextFile(), mrpt::poses::CPose3DPDFGaussianInf::saveToTextFile(), mrpt::poses::CPose3DQuatPDFGaussian::saveToTextFile(), mrpt::poses::CPose3DQuatPDFGaussianInf::saveToTextFile(), mrpt::poses::CPosePDFGaussian::saveToTextFile(), mrpt::poses::CPosePDFGaussianInf::saveToTextFile(), se3_l2_internal(), mrpt::tfest::se3_l2_robust(), mrpt::opengl::CRenderizable::setPose(), mrpt::maps::CLandmark::setPose(), mrpt::math::slerp(), mrpt::nav::PlannerRRT_SE2_TPS::solve(), mrpt::maps::COccupancyGridMap2D::sonarSimulator(), mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::sqrDistanceTo(), Pose3DTests::test_composePoint(), Pose3DTests::test_to_from_2d(), mrpt::maps::COctoMapBase< octomap::ColorOcTree, octomap::ColorOcTreeNode >::TInsertionOptions::TInsertionOptions(), mrpt::opengl::CDisk::traceRay(), mrpt::opengl::CSphere::traceRay(), mrpt::nav::PlannerTPS_VirtualBase::transformPointcloudWithSquareClipping(), mrpt::graphs::detail::graph_ops< graph_t >::write_EDGE_line(), mrpt::poses::CPosePDFGaussianInf::writeToStream(), and mrpt::opengl::CRenderizable::writeToStreamRender().
◆ y() [3/3]
|
inlineinherited |
- Parameters
-
v Set Y coord.
Definition at line 120 of file CPoseOrPoint.h.
◆ y_incr()
|
inlineinherited |
- Parameters
-
v Y+=v
Definition at line 123 of file CPoseOrPoint.h.
Referenced by mrpt::slam::CICP::ICP_Method_Classic(), and mrpt::maps::CBeaconMap::internal_insertObservation().
Member Data Documentation
◆ _init_CPose3DQuat
|
staticprotected |
Definition at line 44 of file CPose3DQuat.h.
◆ classCObject
|
staticinherited |
◆ classCPose3DQuat
|
static |
Definition at line 44 of file CPose3DQuat.h.
◆ classCSerializable
|
staticinherited |
Definition at line 42 of file CSerializable.h.
◆ classinfo
|
static |
Definition at line 44 of file CPose3DQuat.h.
◆ m_coords
| mrpt::math::CArrayDouble<3> mrpt::poses::CPose3DQuat::m_coords |
The translation vector [x,y,z].
Definition at line 47 of file CPose3DQuat.h.
Referenced by composeFrom(), composePoint(), CPose3DQuat(), getAsVector(), mrpt::slam::CRangeBearingKFSLAM::getCurrentRobotPose(), mrpt::slam::CRangeBearingKFSLAM::getCurrentState(), getHomogeneousMatrix(), inverse(), inverseComposeFrom(), inverseComposePoint(), mrpt::slam::CRangeBearingKFSLAM::OnTransitionModel(), operator*=(), readFromStream(), mrpt::vision::CStereoRectifyMap::rectify(), setToNaN(), swap(), and writeToStream().
◆ m_quat
| mrpt::math::CQuaternionDouble mrpt::poses::CPose3DQuat::m_quat |
The quaternion.
Definition at line 48 of file CPose3DQuat.h.
Referenced by composeFrom(), mrpt::poses::CPose3DRotVec::composeFrom(), composePoint(), CPose3DQuat(), getAsVector(), mrpt::slam::CRangeBearingKFSLAM::getCurrentRobotPose(), mrpt::slam::CRangeBearingKFSLAM::getCurrentState(), getHomogeneousMatrix(), inverse(), inverseComposeFrom(), inverseComposePoint(), mrpt::slam::CRangeBearingKFSLAM::OnTransitionModel(), operator*=(), readFromStream(), swap(), and writeToStream().