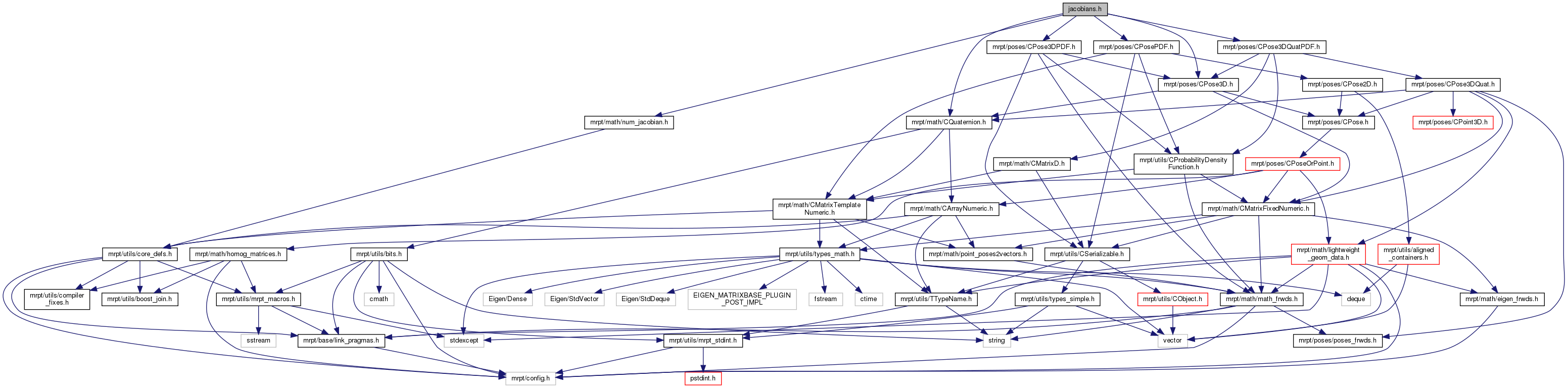
#include <mrpt/math/num_jacobian.h>#include <mrpt/math/CQuaternion.h>#include <mrpt/poses/CPose3D.h>#include <mrpt/poses/CPosePDF.h>#include <mrpt/poses/CPose3DQuatPDF.h>#include <mrpt/poses/CPose3DPDF.h>
Include dependency graph for jacobians.h:
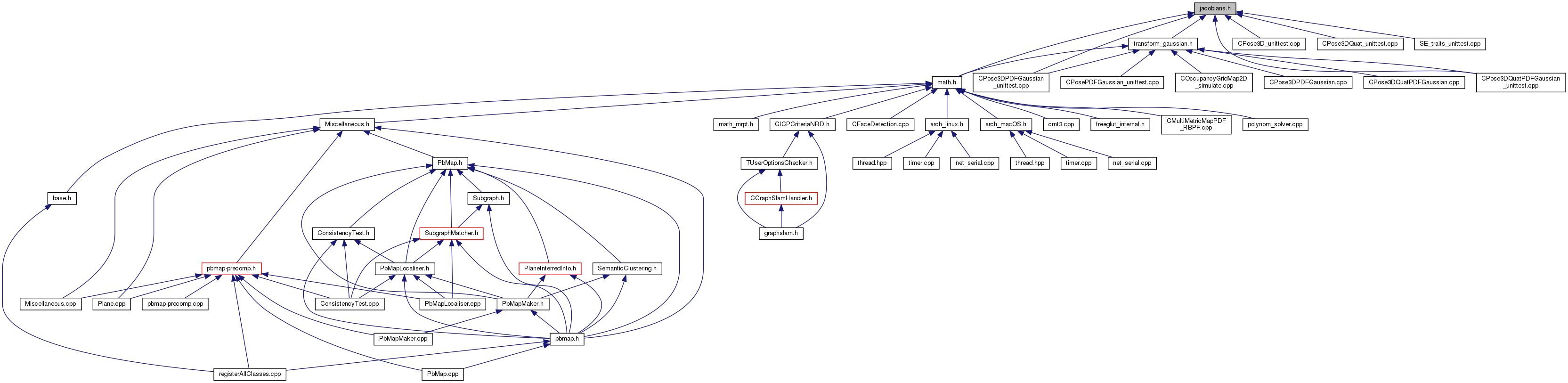
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::math | |
| This base provides a set of functions for maths stuff. | |
| mrpt::math::jacobians | |
| A collection of functions to compute jacobians of diverse transformations, etc (some functions are redirections to existing methods elsewhere, so this namespace is actually used with grouping purposes). | |
Functions | |
| void | mrpt::math::jacobians::jacob_quat_from_yawpitchroll (mrpt::math::CMatrixFixedNumeric< double, 4, 3 > &out_dq_dr, const double yaw, const double pitch, const double roll) |
| Computes the 4x3 Jacobian of the transformation from a 3D pose angles (yaw pitch roll) into a Quaternion, that is, the Jacobian of: More... | |
| void | mrpt::math::jacobians::jacob_quat_from_yawpitchroll (mrpt::math::CMatrixFixedNumeric< double, 4, 3 > &out_dq_dr, const mrpt::poses::CPose3D &in_pose) |
| Computes the 4x3 Jacobian of the transformation from a 3D pose angles (yaw pitch roll) into a Quaternion, that is, the Jacobian of: More... | |
| void | mrpt::math::jacobians::jacob_yawpitchroll_from_quat (mrpt::math::CMatrixFixedNumeric< double, 3, 4 > &out_dr_dq) |
| Computes the 3x4 Jacobian of the transformation from a quaternion (qr qx qy qz) to 3D pose angles (yaw pitch roll). More... | |
| template<class QUATERNION , class MATRIXLIKE > | |
| void | mrpt::math::jacobians::jacob_quat_rotation (const QUATERNION &quaternion, MATRIXLIKE &out_mat4x4) |
Compute the Jacobian of the rotation composition operation  , that is the 4x4 matrix , that is the 4x4 matrix  . More... . More... | |
| void | mrpt::math::jacobians::jacobs_6D_pose_comp (const mrpt::poses::CPose3D &x, const mrpt::poses::CPose3D &u, CMatrixDouble66 &out_df_dx, CMatrixDouble66 &out_df_du) |
Given the 3D(6D) pose composition  , compute the two 6x6 Jacobians , compute the two 6x6 Jacobians  and and  . More... . More... | |
| void | mrpt::math::jacobians::jacobs_6D_pose_comp (const mrpt::poses::CPose3DQuat &x, const mrpt::poses::CPose3DQuat &u, CMatrixDouble77 &out_df_dx, CMatrixDouble77 &out_df_du) |
| Given the 3D(6D) pose composition , compute the two 6x6 Jacobians and . More... | |
| void | mrpt::math::jacobians::jacobs_2D_pose_comp (const mrpt::poses::CPosePDFGaussian &x, const mrpt::poses::CPosePDFGaussian &u, CMatrixDouble33 &out_df_dx, CMatrixDouble33 &out_df_du) |
| Given the 2D pose composition , compute the two 3x3 Jacobians and . More... | |
| template<class VECTORLIKE , class VECTORLIKE2 , class VECTORLIKE3 , class MATRIXLIKE , class USERPARAM > | |
| void | mrpt::math::jacobians::jacob_numeric_estimate (const VECTORLIKE &x, void(*functor)(const VECTORLIKE &x, const USERPARAM &y, VECTORLIKE3 &out), const VECTORLIKE2 &increments, const USERPARAM &userParam, MATRIXLIKE &out_Jacobian) |
| Numerical estimation of the Jacobian of a user-supplied function - this template redirects to mrpt::math::estimateJacobian, see that function for documentation. More... | |