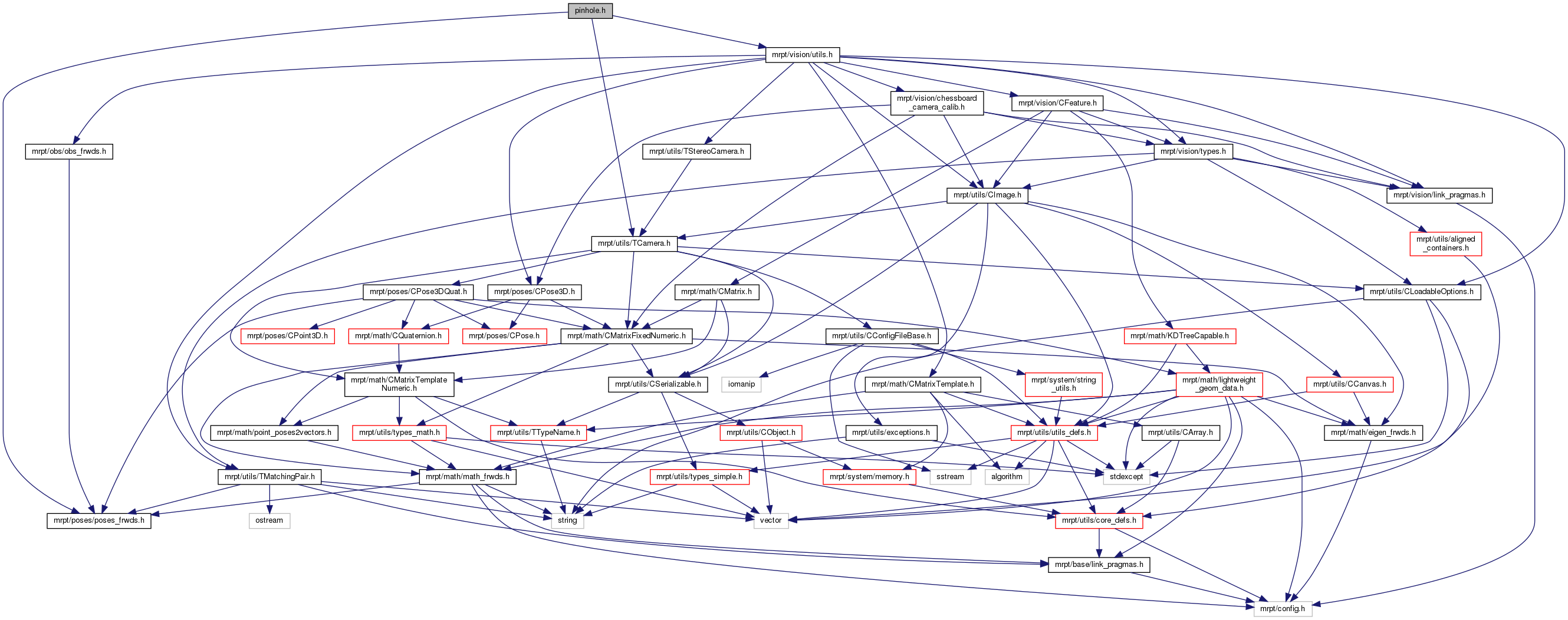
Include dependency graph for pinhole.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::vision | |
| Classes for computer vision, detectors, features, etc. | |
| mrpt::vision::pinhole | |
| Functions related to pinhole camera models, point projections, etc. | |
Functions | |
| void VISION_IMPEXP | mrpt::vision::pinhole::projectPoints_no_distortion (const std::vector< mrpt::math::TPoint3D > &in_points_3D, const mrpt::poses::CPose3D &cameraPose, const mrpt::math::CMatrixDouble33 &intrinsicParams, std::vector< mrpt::utils::TPixelCoordf > &projectedPoints, bool accept_points_behind=false) |
| Project a set of 3D points into a camera at an arbitrary 6D pose using its calibration matrix (undistorted projection model) More... | |
| template<bool INVERSE_CAM_POSE> | |
| mrpt::utils::TPixelCoordf | mrpt::vision::pinhole::projectPoint_no_distortion (const mrpt::utils::TCamera &cam_params, const mrpt::poses::CPose3D &F, const mrpt::math::TPoint3D &P) |
| Project a single 3D point with global coordinates P into a camera at pose F, without distortion parameters. More... | |
| template<typename POINT > | |
| void | mrpt::vision::pinhole::projectPoint_no_distortion (const POINT &in_point_wrt_cam, const mrpt::utils::TCamera &cam_params, mrpt::utils::TPixelCoordf &out_projectedPoints) |
| This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts. More... | |
| void VISION_IMPEXP | mrpt::vision::pinhole::projectPoints_with_distortion (const std::vector< mrpt::math::TPoint3D > &in_points_3D, const mrpt::poses::CPose3D &cameraPose, const mrpt::math::CMatrixDouble33 &intrinsicParams, const std::vector< double > &distortionParams, std::vector< mrpt::utils::TPixelCoordf > &projectedPoints, bool accept_points_behind=false) |
| Project a set of 3D points into a camera at an arbitrary 6D pose using its calibration matrix and distortion parameters (radial and tangential distortions projection model) More... | |
| void VISION_IMPEXP | mrpt::vision::pinhole::projectPoint_with_distortion (const mrpt::math::TPoint3D &in_point_wrt_cam, const mrpt::utils::TCamera &in_cam_params, mrpt::utils::TPixelCoordf &out_projectedPoints, bool accept_points_behind=false) |
| Project one 3D point into a camera using its calibration matrix and distortion parameters (radial and tangential distortions projection model) More... | |
| void VISION_IMPEXP | mrpt::vision::pinhole::projectPoints_with_distortion (const std::vector< mrpt::math::TPoint3D > &P, const mrpt::utils::TCamera ¶ms, const mrpt::poses::CPose3DQuat &cameraPose, std::vector< mrpt::utils::TPixelCoordf > &pixels, bool accept_points_behind=false) |
| This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts. More... | |
| void VISION_IMPEXP | mrpt::vision::pinhole::undistort_points (const std::vector< mrpt::utils::TPixelCoordf > &srcDistortedPixels, std::vector< mrpt::utils::TPixelCoordf > &dstUndistortedPixels, const mrpt::math::CMatrixDouble33 &intrinsicParams, const std::vector< double > &distortionParams) |
| Undistort a list of points given by their pixel coordinates, provided the camera matrix and distortion coefficients. More... | |
| void VISION_IMPEXP | mrpt::vision::pinhole::undistort_points (const std::vector< mrpt::utils::TPixelCoordf > &srcDistortedPixels, std::vector< mrpt::utils::TPixelCoordf > &dstUndistortedPixels, const mrpt::utils::TCamera &cameraModel) |
| Undistort a list of points given by their pixel coordinates, provided the camera matrix and distortion coefficients. More... | |
| void VISION_IMPEXP | mrpt::vision::pinhole::undistort_point (const mrpt::utils::TPixelCoordf &inPt, mrpt::utils::TPixelCoordf &outPt, const mrpt::utils::TCamera &cameraModel) |
| Undistort one point given by its pixel coordinates and the camera parameters. More... | |