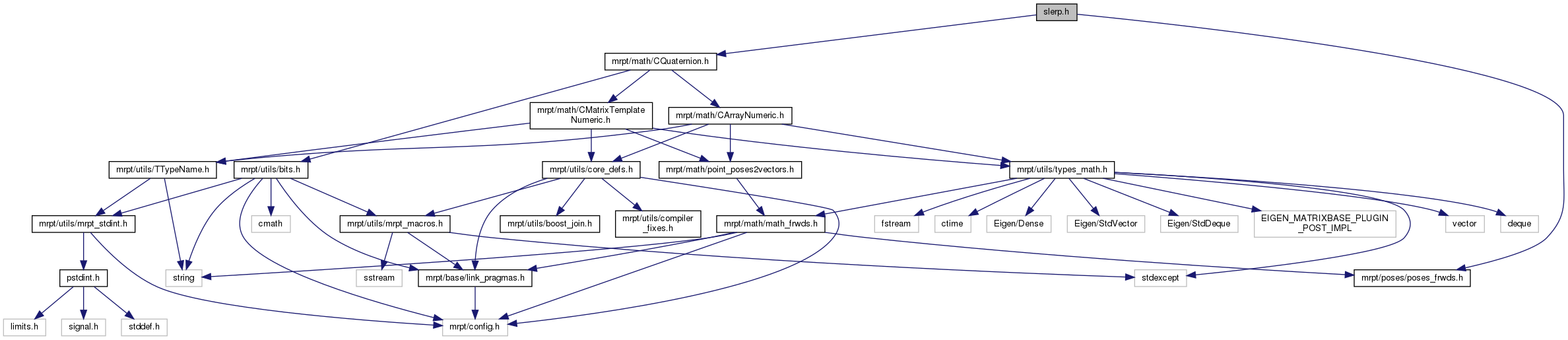
Include dependency graph for slerp.h:
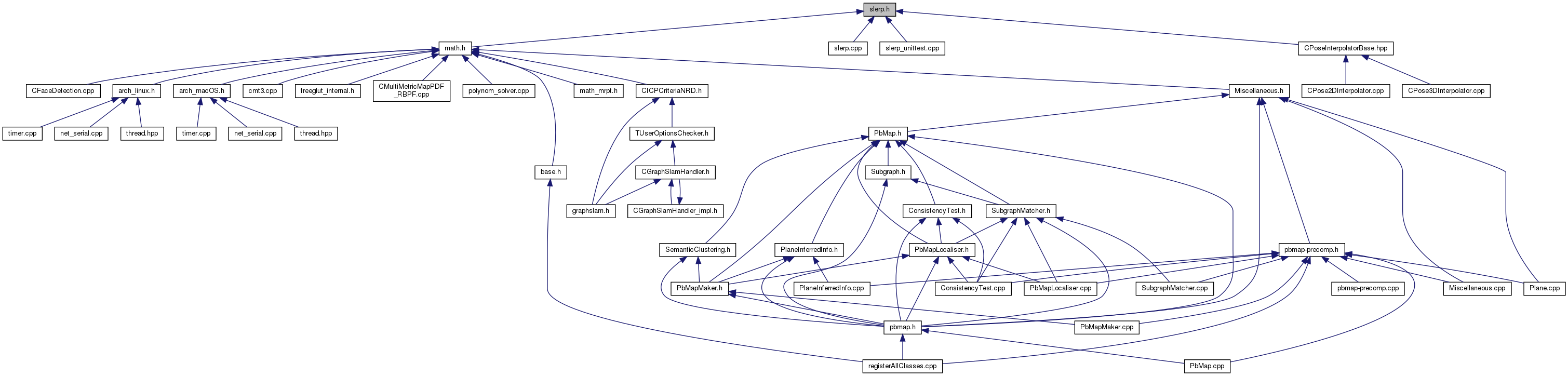
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::math | |
| This base provides a set of functions for maths stuff. | |
Functions | |
SLERP (Spherical Linear Interpolation) functions | |
| template<typename T > | |
| void | mrpt::math::slerp (const CQuaternion< T > &q0, const CQuaternion< T > &q1, const double t, CQuaternion< T > &q) |
| SLERP interpolation between two quaternions. More... | |
| void BASE_IMPEXP | mrpt::math::slerp (const mrpt::poses::CPose3D &q0, const mrpt::poses::CPose3D &q1, const double t, mrpt::poses::CPose3D &p) |
| SLERP interpolation between two 6D poses - like mrpt::math::slerp for quaternions, but interpolates the [X,Y,Z] coordinates as well. More... | |
| void BASE_IMPEXP | mrpt::math::slerp (const mrpt::poses::CPose3DQuat &q0, const mrpt::poses::CPose3DQuat &q1, const double t, mrpt::poses::CPose3DQuat &p) |
| This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts. More... | |
| void BASE_IMPEXP | mrpt::math::slerp_ypr (const mrpt::math::TPose3D &q0, const mrpt::math::TPose3D &q1, const double t, mrpt::math::TPose3D &p) |