#include <iostream>#include <mrpt/graphs/CDirectedGraph.h>#include <mrpt/graphs/CDirectedTree.h>#include <mrpt/utils/CSerializable.h>#include <mrpt/utils/CFileGZInputStream.h>#include <mrpt/utils/CFileGZOutputStream.h>#include <mrpt/utils/TParameters.h>#include <mrpt/utils/traits_map.h>#include <mrpt/utils/stl_serialization.h>#include <mrpt/math/utils.h>#include <mrpt/poses/poses_frwds.h>#include <mrpt/system/os.h>#include <mrpt/opengl/CSetOfObjects.h>#include <mrpt/graphs/dijkstra.h>#include <mrpt/graphs/TNodeAnnotations.h>#include <mrpt/graphs/TMRSlamNodeAnnotations.h>#include <mrpt/graphs/THypothesis.h>#include <iterator>#include <algorithm>#include <memory>#include "CNetworkOfPoses_impl.h"#include <mrpt/graphs/CVisualizer.h>#include <mrpt/graphs/CMRVisualizer.h>
Include dependency graph for CNetworkOfPoses.h:

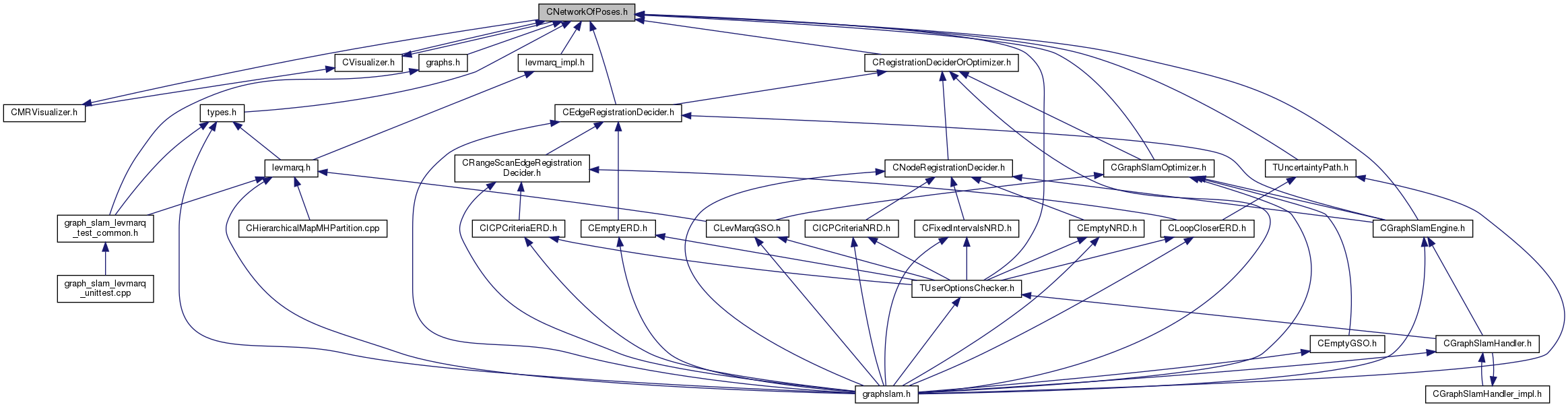
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | mrpt::graphs::CNetworkOfPoses< CPOSE, MAPS_IMPLEMENTATION, NODE_ANNOTATIONS, EDGE_ANNOTATIONS > |
| A directed graph of pose constraints, with edges being the relative poses between pairs of nodes identified by their numeric IDs (of type mrpt::utils::TNodeID). More... | |
| struct | mrpt::graphs::CNetworkOfPoses< CPOSE, MAPS_IMPLEMENTATION, NODE_ANNOTATIONS, EDGE_ANNOTATIONS >::global_pose_t |
| The type of each global pose in nodes: an extension of the constraint_no_pdf_t pose with any optional user-defined data. More... | |
| struct | mrpt::utils::TTypeName< mrpt::graphs::CNetworkOfPoses< CPOSE, MAPS_IMPLEMENTATION, NODE_ANNOTATIONS, EDGE_ANNOTATIONS > > |
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::graphs | |
| Abstract graph and tree data structures, plus generic graph algorithms. | |
| mrpt::graphs::detail | |
| Internal functions for MRPT. | |
| mrpt::utils | |
| Classes for serialization, sockets, ini-file manipulation, streams, list of properties-values, timewatch, extensions to STL. | |
Functions | |
| template<class CPOSE , class MAPS_IMPLEMENTATION , class NODE_ANNOTATIONS , class EDGE_ANNOTATIONS > | |
| mrpt::utils::CStream & | mrpt::graphs::operator<< (mrpt::utils::CStream &out, const CNetworkOfPoses< CPOSE, MAPS_IMPLEMENTATION, NODE_ANNOTATIONS, EDGE_ANNOTATIONS > &obj) |
| Binary serialization (write) operator "stream << graph". More... | |
| template<class CPOSE , class MAPS_IMPLEMENTATION , class NODE_ANNOTATIONS , class EDGE_ANNOTATIONS > | |
| mrpt::utils::CStream & | mrpt::graphs::operator>> (mrpt::utils::CStream &in, CNetworkOfPoses< CPOSE, MAPS_IMPLEMENTATION, NODE_ANNOTATIONS, EDGE_ANNOTATIONS > &obj) |
| Binary serialization (read) operator "stream >> graph". More... | |