#include <mrpt/math/lightweight_geom_data.h>#include <mrpt/system/datetime.h>#include <mrpt/opengl/opengl_frwds.h>#include <mrpt/utils/TColor.h>#include <vector>#include <string>#include <mrpt/nav/link_pragmas.h>
Include dependency graph for TWaypoint.h:

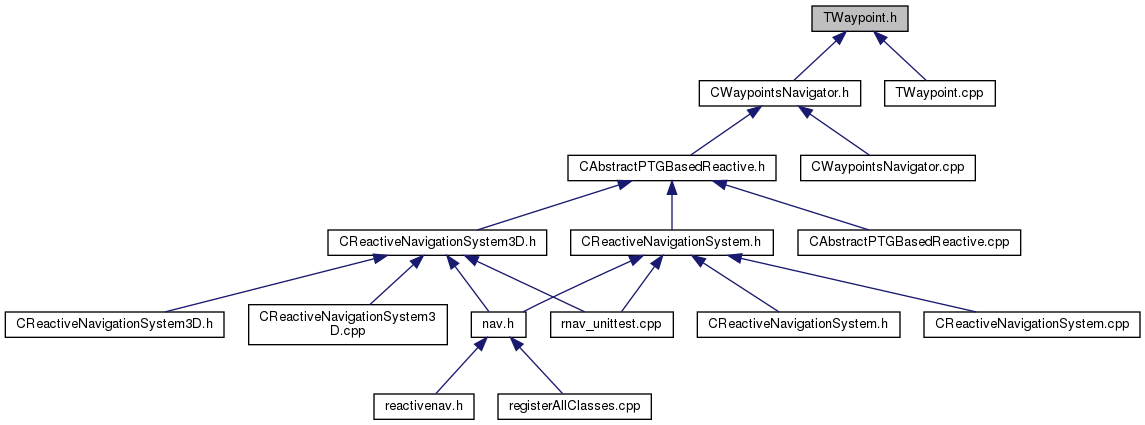
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | mrpt::nav::TWaypoint |
| A single waypoint within TWaypointSequence. More... | |
| struct | mrpt::nav::TWaypointsRenderingParams |
| used in getAsOpenglVisualization() More... | |
| struct | mrpt::nav::TWaypointSequence |
| The struct for requesting navigation requests for a sequence of waypoints. More... | |
| struct | mrpt::nav::TWaypointStatus |
| A waypoint with an execution status. More... | |
| struct | mrpt::nav::TWaypointStatusSequence |
| The struct for querying the status of waypoints navigation. More... | |
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::nav | |