Detailed Description
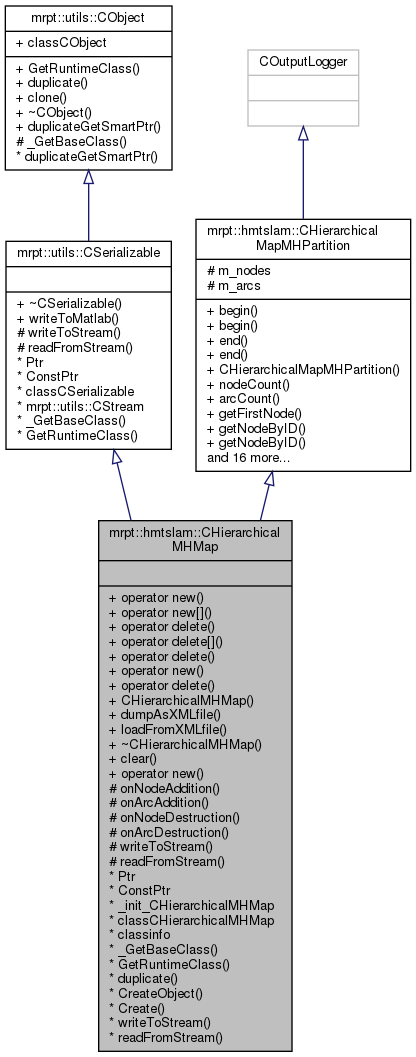
The most high level class for storing hybrid, multi-hypothesis maps in a graph-based model.
This class is used within the HMT-SLAM implementation in CHMTSLAM.
- See also
- CHMTSLAM, CHMHMapArc, CHMHMapNode, CHierarchicalMHMapPartition
Definition at line 31 of file CHierarchicalMHMap.h.
#include <mrpt/hmtslam/CHierarchicalMHMap.h>
Public Types | |
| typedef TNodeList::iterator | iterator |
| typedef TNodeList::const_iterator | const_iterator |
| typedef std::vector< CHMHMapNode::TNodeID > | TNodeIDsList |
| A type that reprensents a sequence of node IDs. More... | |
Public Member Functions | |
| void * | operator new (size_t size) |
| void * | operator new[] (size_t size) |
| void | operator delete (void *ptr) throw () |
| void | operator delete[] (void *ptr) throw () |
| void | operator delete (void *memory, void *ptr) throw () |
| void * | operator new (size_t size, const std::nothrow_t &) throw () |
| void | operator delete (void *ptr, const std::nothrow_t &) throw () |
| CHierarchicalMHMap () | |
| Default constructor. More... | |
| void | dumpAsXMLfile (std::string fileName) const |
| Destructor. More... | |
| void | loadFromXMLfile (std::string fileName) |
| Load a graph from a XML file. More... | |
| virtual | ~CHierarchicalMHMap () |
| void | clear () |
| Erase all the contents of map (It delete all nodes/arcs objects) More... | |
| virtual mxArray * | writeToMatlab () const |
Introduces a pure virtual method responsible for writing to a mxArray Matlab object, typically a MATLAB struct whose contents are documented in each derived class. More... | |
| CObject * | clone () const |
| Cloning interface for smart pointers. More... | |
| const_iterator | begin () const |
| Returns an iterator to the first node in the graph. More... | |
| iterator | begin () |
| Returns an iterator to the first node in the graph. More... | |
| const_iterator | end () const |
| Returns an iterator to the end of the list of nodes in the graph. More... | |
| iterator | end () |
| Returns an iterator to the end of the list of nodes in the graph. More... | |
| size_t | nodeCount () const |
| Returns the number of nodes in the partition: More... | |
| size_t | arcCount () const |
| Returns the number of arcs in the partition: More... | |
| CHMHMapNodePtr | getFirstNode () |
| Returns the first node in the graph, or NULL if it does not exist. More... | |
| CHMHMapNodePtr | getNodeByID (CHMHMapNode::TNodeID id) |
| Returns the node with the given ID, or NULL if it does not exist. More... | |
| const CHMHMapNodePtr | getNodeByID (CHMHMapNode::TNodeID id) const |
| Returns the node with the given ID, or NULL if it does not exist. More... | |
| CHMHMapNodePtr | getNodeByLabel (const std::string &label, const THypothesisID &hypothesisID) |
| Returns the node with the given label (case insensitive) for some given hypothesis ID, or NULL if it does not exist. More... | |
| const CHMHMapNodePtr | getNodeByLabel (const std::string &label, const THypothesisID &hypothesisID) const |
| Returns the node with the given label (case insensitive) for some given hypothesis ID, or NULL if it does not exist. More... | |
| void | saveAreasDiagramForMATLAB (const std::string &filName, const CHMHMapNode::TNodeID &idReferenceNode, const THypothesisID &hypothesisID) const |
| Returns a partition of this graph only with nodes at a given level in the hierarchy (0=ground level,1=parent level,etc) More... | |
| void | saveAreasDiagramWithEllipsedForMATLAB (const std::string &filName, const CHMHMapNode::TNodeID &idReferenceNode, const THypothesisID &hypothesisID, float uncertaintyExagerationFactor=1.0f, bool drawArcs=false, unsigned int numberOfIterationsForOptimalGlobalPoses=4) const |
| Saves a MATLAB script that represents graphically the nodes with type="Area" in this hierarchical-map(partition), using the stated node as global coordinates reference, and drawing the ellipses of the localization uncertainty for each node. More... | |
| void | saveGlobalMapForMATLAB (const std::string &filName, const THypothesisID &hypothesisID, const CHMHMapNode::TNodeID &idReferenceNode) const |
| Saves a MATLAB script that represents graphically the reconstructed "global map" ADDITIONAL NOTES: More... | |
| void | findPathBetweenNodes (const CHMHMapNode::TNodeID &nodeFrom, const CHMHMapNode::TNodeID &nodeTo, const THypothesisID &hypothesisID, TArcList &out_path, bool direction=false) const |
| The Dijkstra algorithm for finding the shortest path between a pair of nodes. More... | |
| void | computeCoordinatesTransformationBetweenNodes (const CHMHMapNode::TNodeID &nodeFrom, const CHMHMapNode::TNodeID &nodeTo, mrpt::poses::CPose3DPDFParticles &posePDF, const THypothesisID &hypothesisID, unsigned int particlesCount=100, float additionalNoiseXYratio=0.02, float additionalNoisePhiRad=mrpt::utils::DEG2RAD(0.1)) const |
| Draw a number of samples according to the PDF of the coordinates transformation between a pair of "Area"'s nodes. More... | |
| float | computeMatchProbabilityBetweenNodes (const CHMHMapNode::TNodeID &nodeFrom, const CHMHMapNode::TNodeID &nodeTo, float &maxMatchProb, mrpt::poses::CPose3DPDFSOG &estimatedRelativePose, const THypothesisID &hypothesisID, unsigned int monteCarloSamplesPose=300) |
| Computes the probability [0,1] of two areas' gridmaps to "match" (loop closure), according to the grid maps and pose uncertainty from information in arcs (uses a Monte Carlo aproximation) If there is not enough information or a robust estimation cannot be found, there will not be particles in "estimatedRelativePose". More... | |
| void | findArcsBetweenNodes (const CHMHMapNode::TNodeID &node1, const CHMHMapNode::TNodeID &node2, const THypothesisID &hypothesisID, TArcList &out_listArcs) const |
| Returns all the arcs between a pair of nodes: More... | |
| void | findArcsOfTypeBetweenNodes (const CHMHMapNode::TNodeID &node1id, const CHMHMapNode::TNodeID &node2id, const THypothesisID &hypothesisID, const std::string &arcType, TArcList &ret) const |
| Returns the arcs between a pair of nodes of a given type. More... | |
| CHMHMapArcPtr | findArcOfTypeBetweenNodes (const CHMHMapNode::TNodeID &node1id, const CHMHMapNode::TNodeID &node2id, const THypothesisID &hypothesisID, const std::string &arcType, bool &isInverted) const |
| Returns the first arc between a pair of nodes of a given type, and if it is in the opposite direction. More... | |
| bool | areNodesNeightbour (const CHMHMapNode::TNodeID &node1, const CHMHMapNode::TNodeID &node2, const THypothesisID &hypothesisID, const char *requiredAnnotation=NULL) const |
| Returns whether two nodes are "neightbour", i.e. More... | |
| void | computeGloballyConsistentNodeCoordinates (std::map< CHMHMapNode::TNodeID, mrpt::poses::CPose3DPDFGaussian, std::less< CHMHMapNode::TNodeID >, Eigen::aligned_allocator< std::pair< const CHMHMapNode::TNodeID, mrpt::poses::CPose3DPDFGaussian > > > &nodePoses, const CHMHMapNode::TNodeID &idReferenceNode, const THypothesisID &hypothesisID, const unsigned int &numberOfIterations=2) const |
| This methods implements a Lu&Milios-like globally optimal estimation for the global coordinates of all the nodes in the graph according to all available arcs with relative pose information. More... | |
| void | getAs3DScene (mrpt::opengl::COpenGLScene &outScene, const CHMHMapNode::TNodeID &idReferenceNode, const THypothesisID &hypothesisID, const unsigned int &numberOfIterationsForOptimalGlobalPoses=5, const bool &showRobotPoseIDs=true) const |
| Returns a 3D scene reconstruction of the hierarchical map. More... | |
| void | dumpAsText (utils::CStringList &s) const |
| Return a textual description of the whole graph. More... | |
| double | computeOverlapProbabilityBetweenNodes (const CHMHMapNode::TNodeID &nodeFrom, const CHMHMapNode::TNodeID &nodeTo, const THypothesisID &hypothesisID, const size_t &monteCarloSamples=100, const float margin_to_substract=6) const |
| Computes the probability [0,1] of two areas' gridmaps to overlap, via a Monte Carlo aproximation. More... | |
RTTI classes and functions | |
| mrpt::utils::CObjectPtr | duplicateGetSmartPtr () const |
| Returns a copy of the object, indepently of its class, as a smart pointer (the newly created object will exist as long as any copy of this smart pointer). More... | |
Static Public Member Functions | |
| static void * | operator new (size_t size, void *ptr) |
Static Public Attributes | |
| static const mrpt::utils::TRuntimeClassId | classCObject |
RTTI stuff <br> | |
| static const mrpt::utils::TRuntimeClassId | classCSerializable |
Protected Member Functions | |
| void | onNodeAddition (CHMHMapNodePtr &node) |
| Event handler to be called just after a node has being created: it will be added to the internal list. More... | |
| void | onArcAddition (CHMHMapArcPtr &arc) |
| Event handler to be called just after an arc has being created: it will be added to the internal list. More... | |
| void | onNodeDestruction (CHMHMapNode *node) |
| Event handler to be called just before a node is being destroyed: it will be removed from the internal list. More... | |
| void | onArcDestruction (CHMHMapArc *arc) |
| Event handler to be called just before an arc is being destroyed: it will be removed from the internal list. More... | |
CSerializable virtual methods | |
| void | writeToStream (mrpt::utils::CStream &out, int *getVersion) const |
| Introduces a pure virtual method responsible for writing to a CStream. More... | |
| void | readFromStream (mrpt::utils::CStream &in, int version) |
| Introduces a pure virtual method responsible for loading from a CStream This can not be used directly be users, instead use "stream >> object;" for reading it from a stream or "stream >> object_ptr;" if the class is unknown apriori. More... | |
Protected Attributes | |
| TNodeList | m_nodes |
| The internal list of nodes and arcs in the whole hierarchical model. More... | |
| TArcList | m_arcs |
Friends | |
| class | CHMHMapArc |
| class | CHMHMapNode |
RTTI stuff <br> | |
| typedef CHierarchicalMHMapPtr | Ptr |
| typedef CHierarchicalMHMapPtr | ConstPtr |
| static mrpt::utils::CLASSINIT | _init_CHierarchicalMHMap |
| static mrpt::utils::TRuntimeClassId | classCHierarchicalMHMap |
| static const mrpt::utils::TRuntimeClassId * | classinfo |
| static const mrpt::utils::TRuntimeClassId * | _GetBaseClass () |
| virtual const mrpt::utils::TRuntimeClassId * | GetRuntimeClass () const |
| Returns information about the class of an object in runtime. More... | |
| virtual mrpt::utils::CObject * | duplicate () const |
| Returns a copy of the object, indepently of its class. More... | |
| static mrpt::utils::CObject * | CreateObject () |
| static CHierarchicalMHMapPtr | Create () |
Member Typedef Documentation
◆ const_iterator
|
inherited |
Definition at line 46 of file CHierarchicalMapMHPartition.h.
◆ ConstPtr
| typedef CHierarchicalMHMapPtr mrpt::hmtslam::CHierarchicalMHMap::ConstPtr |
Definition at line 37 of file CHierarchicalMHMap.h.
◆ iterator
|
inherited |
Definition at line 45 of file CHierarchicalMapMHPartition.h.
◆ Ptr
| typedef CHierarchicalMHMapPtr mrpt::hmtslam::CHierarchicalMHMap::Ptr |
A typedef for the associated smart pointer
Definition at line 37 of file CHierarchicalMHMap.h.
◆ TNodeIDsList
|
inherited |
A type that reprensents a sequence of node IDs.
Definition at line 66 of file CHierarchicalMapMHPartition.h.
Constructor & Destructor Documentation
◆ CHierarchicalMHMap()
| CHierarchicalMHMap::CHierarchicalMHMap | ( | ) |
Default constructor.
Definition at line 26 of file CHierarchicalMHMap.cpp.
◆ ~CHierarchicalMHMap()
|
virtual |
Definition at line 34 of file CHierarchicalMHMap.cpp.
References mrpt::utils::clear().
Member Function Documentation
◆ _GetBaseClass()
|
staticprotected |
◆ arcCount()
|
inherited |
Returns the number of arcs in the partition:
Definition at line 49 of file CHierarchicalMapMHPartition.cpp.
◆ areNodesNeightbour()
|
inherited |
Returns whether two nodes are "neightbour", i.e.
have a direct arc between them
Definition at line 1050 of file CHierarchicalMapMHPartition.cpp.
References MRPT_END, and MRPT_START.
◆ begin() [1/2]
|
inlineinherited |
Returns an iterator to the first node in the graph.
Definition at line 52 of file CHierarchicalMapMHPartition.h.
◆ begin() [2/2]
|
inlineinherited |
Returns an iterator to the first node in the graph.
Definition at line 49 of file CHierarchicalMapMHPartition.h.
◆ clear()
| void CHierarchicalMHMap::clear | ( | ) |
Erase all the contents of map (It delete all nodes/arcs objects)
Definition at line 42 of file CHierarchicalMHMap.cpp.
Referenced by mrpt::hmtslam::CHMTSLAM::initializeEmptyMap().
◆ clone()
|
inlineinherited |
◆ computeCoordinatesTransformationBetweenNodes()
|
inherited |
Draw a number of samples according to the PDF of the coordinates transformation between a pair of "Area"'s nodes.
- Exceptions
-
std::exception If there is not enought information in arcs to compute the PDF
Definition at line 846 of file CHierarchicalMapMHPartition.cpp.
References ARC_ANNOTATION_DELTA, ARC_ANNOTATION_DELTA_SRC_POSEID, ARC_ANNOTATION_DELTA_TRG_POSEID, ASSERT_, mrpt::poses::CPose3DPDFGaussian::copyFrom(), mrpt::random::CRandomGenerator::drawGaussian1D_normalized(), mrpt::poses::CPose3DPDFGaussian::drawManySamples(), mrpt::bayes::CParticleFilterData< T >::m_particles, MRPT_END, MRPT_START, NODE_ANNOTATION_REF_POSEID, mrpt::bayes::CParticleFilterDataImpl< Derived, particle_list_t >::normalizeWeights(), mrpt::random::randomGenerator, and mrpt::poses::CPose3DPDFParticles::resetDeterministic().
◆ computeGloballyConsistentNodeCoordinates()
|
inherited |
This methods implements a Lu&Milios-like globally optimal estimation for the global coordinates of all the nodes in the graph according to all available arcs with relative pose information.
Global coordinates will be computed relative to the node "idReferenceNode".
- Exceptions
-
std::exception If there is any node without a pose arc, invalid (non invertible) matrixes, etc...
Definition at line 1281 of file CHierarchicalMapMHPartition.cpp.
References ARC_ANNOTATION_DELTA, mrpt::poses::CPose3DPDFGaussianInf::copyFrom(), mrpt::poses::CPose3DPDFGaussian::cov, mrpt::graphs::CNetworkOfPoses< CPOSE, MAPS_IMPLEMENTATION, NODE_ANNOTATIONS, EDGE_ANNOTATIONS >::dijkstra_nodes_estimate(), mrpt::graphs::CDirectedGraph< TYPE_EDGES, EDGE_ANNOTATIONS >::insertEdgeAtEnd(), mrpt::poses::CPose3DPDFGaussian::mean, MRPT_END, MRPT_START, mrpt::graphs::CNetworkOfPoses< CPOSE, MAPS_IMPLEMENTATION, NODE_ANNOTATIONS, EDGE_ANNOTATIONS >::nodes, mrpt::graphslam::optimize_graph_spa_levmarq(), and mrpt::graphs::CNetworkOfPoses< CPOSE, MAPS_IMPLEMENTATION, NODE_ANNOTATIONS, EDGE_ANNOTATIONS >::root.
◆ computeMatchProbabilityBetweenNodes()
|
inherited |
Computes the probability [0,1] of two areas' gridmaps to "match" (loop closure), according to the grid maps and pose uncertainty from information in arcs (uses a Monte Carlo aproximation) If there is not enough information or a robust estimation cannot be found, there will not be particles in "estimatedRelativePose".
Definition at line 963 of file CHierarchicalMapMHPartition.cpp.
References MRPT_END, MRPT_START, MRPT_UNUSED_PARAM, and THROW_EXCEPTION.
◆ computeOverlapProbabilityBetweenNodes()
|
inherited |
Computes the probability [0,1] of two areas' gridmaps to overlap, via a Monte Carlo aproximation.
- Exceptions
-
std::exception If there is not enought information in arcs, etc...
- Parameters
-
margin_to_substract In meters, the area of each gridmap is "eroded" this amount to compensate the area in excess usually found in gridmaps.
Definition at line 1509 of file CHierarchicalMapMHPartition.cpp.
References ASSERT_, mrpt::bayes::CParticleFilterData< T >::m_particles, MRPT_END, MRPT_START, NODE_ANNOTATION_METRIC_MAPS, and mrpt::math::RectanglesIntersection().
◆ Create()
|
static |
◆ CreateObject()
|
static |
◆ dumpAsText()
|
inherited |
Return a textual description of the whole graph.
Definition at line 1354 of file CHierarchicalMapMHPartition.cpp.
References ARC_ANNOTATION_DELTA, ARC_ANNOTATION_DELTA_SRC_POSEID, ARC_ANNOTATION_DELTA_TRG_POSEID, ASSERT_, mrpt::utils::CStringList::clear(), mrpt::poses::CPose3DPDFGaussian::copyFrom(), mrpt::poses::CPose3DPDFParticles::getMean(), mrpt::poses::CPose3DPDFGaussian::mean, NODE_ANNOTATION_POSES_GRAPH, NODE_ANNOTATION_REF_POSEID, mrpt::poses::CPose3D::pitch(), RAD2DEG, mrpt::poses::CPose3D::roll(), mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::x(), mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::y(), and mrpt::poses::CPose3D::yaw().
◆ dumpAsXMLfile()
| void CHierarchicalMHMap::dumpAsXMLfile | ( | std::string | fileName | ) | const |
Destructor.
Save the whole graph as a XML file
Definition at line 304 of file CHierarchicalMHMap.cpp.
References ASSERT_, mrpt::utils::CSimpleDatabase::createTable(), mrpt::format(), IS_CLASS, mrpt::utils::ObjectToString(), and mrpt::utils::CSimpleDatabase::saveAsXML().
◆ duplicate()
|
virtual |
Returns a copy of the object, indepently of its class.
Implements mrpt::utils::CObject.
◆ duplicateGetSmartPtr()
|
inlineinherited |
Returns a copy of the object, indepently of its class, as a smart pointer (the newly created object will exist as long as any copy of this smart pointer).
Definition at line 162 of file CObject.h.
References mrpt::utils::CObjectPtr.
Referenced by mrpt::obs::CRawlog::addActions(), mrpt::slam::CIncrementalMapPartitioner::addMapFrame(), and mrpt::obs::CRawlog::addObservations().
◆ end() [1/2]
|
inlineinherited |
Returns an iterator to the end of the list of nodes in the graph.
Definition at line 58 of file CHierarchicalMapMHPartition.h.
◆ end() [2/2]
|
inlineinherited |
Returns an iterator to the end of the list of nodes in the graph.
Definition at line 55 of file CHierarchicalMapMHPartition.h.
◆ findArcOfTypeBetweenNodes()
|
inherited |
Returns the first arc between a pair of nodes of a given type, and if it is in the opposite direction.
- Returns
- The arc, or NULL if not found.
Definition at line 1474 of file CHierarchicalMapMHPartition.cpp.
References MRPT_END, and MRPT_START.
◆ findArcsBetweenNodes()
|
inherited |
Returns all the arcs between a pair of nodes:
Definition at line 985 of file CHierarchicalMapMHPartition.cpp.
References MRPT_END, and MRPT_START.
◆ findArcsOfTypeBetweenNodes()
|
inherited |
Returns the arcs between a pair of nodes of a given type.
Definition at line 1016 of file CHierarchicalMapMHPartition.cpp.
References MRPT_END, and MRPT_START.
◆ findPathBetweenNodes()
|
inherited |
The Dijkstra algorithm for finding the shortest path between a pair of nodes.
- Returns
- The sequence of arcs connecting the nodes.It will be empty if no path is found or when the starting and ending node coincide.
Definition at line 721 of file CHierarchicalMapMHPartition.cpp.
References ASSERT_, ASSERTMSG_, MRPT_END, and MRPT_START.
◆ getAs3DScene()
|
inherited |
Returns a 3D scene reconstruction of the hierarchical map.
See "computeGloballyConsistentNodeCoordinates" for the meaning of "numberOfIterationsForOptimalGlobalPoses"
Definition at line 1088 of file CHierarchicalMapMHPartition.cpp.
References mrpt::poses::CPose3D::addComponents(), mrpt::opengl::COpenGLScene::clear(), mrpt::opengl::CDisk::Create(), mrpt::opengl::CGridPlaneXY::Create(), mrpt::opengl::CSetOfObjects::Create(), mrpt::opengl::CSimpleLine::Create(), mrpt::opengl::CSphere::Create(), mrpt::opengl::CText::Create(), mrpt::opengl::COpenGLScene::insert(), MRPT_END, MRPT_START, NODE_ANNOTATION_METRIC_MAPS, NODE_ANNOTATION_POSES_GRAPH, mrpt::poses::CPose3D::normalizeAngles(), mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::x(), and mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::y().
◆ getFirstNode()
|
inherited |
Returns the first node in the graph, or NULL if it does not exist.
- Returns
- A pointer to the object. DO NOT DELETE this object, if you want to modify it in someway, first obtain a copy by invoking "CSerializable::duplicate"
Definition at line 122 of file CHierarchicalMapMHPartition.cpp.
◆ getNodeByID() [1/2]
|
inherited |
Returns the node with the given ID, or NULL if it does not exist.
- Returns
- A pointer to the object. DO NOT DELETE this object, if you want to modify it in someway, first obtain a copy by invoking "CSerializable::duplicate"
Definition at line 58 of file CHierarchicalMapMHPartition.cpp.
References AREAID_INVALID, MRPT_END, and MRPT_START.
Referenced by mrpt::hmtslam::CHMHMapArc::Create().
◆ getNodeByID() [2/2]
|
inherited |
Returns the node with the given ID, or NULL if it does not exist.
- Returns
- A pointer to the object. DO NOT DELETE this object, if you want to modify it in someway, first obtain a copy by invoking "CSerializable::duplicate"
Definition at line 71 of file CHierarchicalMapMHPartition.cpp.
References AREAID_INVALID, MRPT_END, and MRPT_START.
◆ getNodeByLabel() [1/2]
|
inherited |
Returns the node with the given label (case insensitive) for some given hypothesis ID, or NULL if it does not exist.
- Returns
- A pointer to the object. DO NOT DELETE this object, if you want to modify it in someway, first obtain a copy by invoking "CSerializable::duplicate"
Definition at line 85 of file CHierarchicalMapMHPartition.cpp.
References mrpt::system::os::_strcmpi(), MRPT_END, and MRPT_START.
◆ getNodeByLabel() [2/2]
|
inherited |
Returns the node with the given label (case insensitive) for some given hypothesis ID, or NULL if it does not exist.
- Returns
- A pointer to the object. DO NOT DELETE this object, if you want to modify it in someway, first obtain a copy by invoking "CSerializable::duplicate"
Definition at line 103 of file CHierarchicalMapMHPartition.cpp.
References mrpt::system::os::_strcmpi(), MRPT_END, and MRPT_START.
◆ GetRuntimeClass()
|
virtual |
Returns information about the class of an object in runtime.
Reimplemented from mrpt::utils::CSerializable.
◆ loadFromXMLfile()
| void CHierarchicalMHMap::loadFromXMLfile | ( | std::string | fileName | ) |
Load a graph from a XML file.
Definition at line 191 of file CHierarchicalMHMap.cpp.
References COMMON_TOPOLOG_HYP, mrpt::poses::CPoint2D::Create(), mrpt::utils::CSimpleDatabase::getTable(), mrpt::utils::CSimpleDatabase::loadFromXML(), NODE_ANNOTATION_PLACE_POSE, and mrpt::system::tokenize().
◆ nodeCount()
|
inherited |
Returns the number of nodes in the partition:
Definition at line 41 of file CHierarchicalMapMHPartition.cpp.
◆ onArcAddition()
|
protected |
Event handler to be called just after an arc has being created: it will be added to the internal list.
Definition at line 178 of file CHierarchicalMHMap.cpp.
Referenced by mrpt::hmtslam::CHMHMapArc::Create().
◆ onArcDestruction()
|
protected |
Event handler to be called just before an arc is being destroyed: it will be removed from the internal list.
- Note
- At *addition we use a smart pointer to assure all the implied guys use the same smrt. pnt., but at destructors the objects don't know anything but "this", thus the usage of plain pointers.
Definition at line 145 of file CHierarchicalMHMap.cpp.
◆ onNodeAddition()
|
protected |
Event handler to be called just after a node has being created: it will be added to the internal list.
Definition at line 157 of file CHierarchicalMHMap.cpp.
References ASSERT_.
Referenced by mrpt::hmtslam::CHMHMapNode::Create().
◆ onNodeDestruction()
|
protected |
Event handler to be called just before a node is being destroyed: it will be removed from the internal list.
- Note
- At *addition we use a smart pointer to assure all the implied guys use the same smrt. pnt., but at destructors the objects don't know anything but "this", thus the usage of plain pointers.
Definition at line 131 of file CHierarchicalMHMap.cpp.
References mrpt::hmtslam::CHMHMapNode::getID().
◆ operator delete() [1/3]
|
inline | ||||||||||||||||||||
Definition at line 37 of file CHierarchicalMHMap.h.
◆ operator delete() [2/3]
Definition at line 37 of file CHierarchicalMHMap.h.
◆ operator delete() [3/3]
|
inline | ||||||||||||||||||||
Definition at line 37 of file CHierarchicalMHMap.h.
◆ operator delete[]()
Definition at line 37 of file CHierarchicalMHMap.h.
◆ operator new() [1/3]
|
inline |
Definition at line 37 of file CHierarchicalMHMap.h.
◆ operator new() [2/3]
|
inline | ||||||||||||||||||||
Definition at line 37 of file CHierarchicalMHMap.h.
◆ operator new() [3/3]
|
inlinestatic |
Definition at line 37 of file CHierarchicalMHMap.h.
◆ operator new[]()
|
inline |
Definition at line 37 of file CHierarchicalMHMap.h.
◆ readFromStream()
|
protectedvirtual |
Introduces a pure virtual method responsible for loading from a CStream This can not be used directly be users, instead use "stream >> object;" for reading it from a stream or "stream >> object_ptr;" if the class is unknown apriori.
- Parameters
-
in The input binary stream where the object data must read from. version The version of the object stored in the stream: use this version number in your code to know how to read the incoming data.
- Exceptions
-
std::exception On any error, see CStream::ReadBuffer
- See also
- CStream
Implements mrpt::utils::CSerializable.
Definition at line 92 of file CHierarchicalMHMap.cpp.
References mrpt::utils::clear(), MRPT_THROW_UNKNOWN_SERIALIZATION_VERSION, and version.
◆ saveAreasDiagramForMATLAB()
|
inherited |
Returns a partition of this graph only with nodes at a given level in the hierarchy (0=ground level,1=parent level,etc)
- The partition may be empty if no node fulfills the condition.
- All arcs STARTING at each node from the partition will be added to the partition as well.
- Levels in the hierarchy here stands for arcs of type "arcType_Belongs" only.
- See also
- CHMHMapArc Saves a MATLAB script that represents graphically the nodes with type="Area" in this hierarchical-map(partition), using the stated node as global coordinates reference. ADDITIONAL NOTES:
Coordinates are computed simply as the mean value of the first arc with an annotation "RelativePose", added to the pose of the original node.
- If the coordinates of any node can not be computed (no arcs,...), an exception will be raised.
Definition at line 132 of file CHierarchicalMapMHPartition.cpp.
References MRPT_UNUSED_PARAM.
◆ saveAreasDiagramWithEllipsedForMATLAB()
|
inherited |
Saves a MATLAB script that represents graphically the nodes with type="Area" in this hierarchical-map(partition), using the stated node as global coordinates reference, and drawing the ellipses of the localization uncertainty for each node.
ADDITIONAL NOTES:
- Coordinates are computed simply as the mean value of the first arc with an annotation "RelativePose", added to the pose of the original node.
- If the coordinates of any node can not be computed (no arcs,...), an exception will be raised.
Definition at line 305 of file CHierarchicalMapMHPartition.cpp.
References MRPT_UNUSED_PARAM.
◆ saveGlobalMapForMATLAB()
|
inherited |
Saves a MATLAB script that represents graphically the reconstructed "global map" ADDITIONAL NOTES:
- Coordinates are computed simply as the mean value of the first arc with an annotation "RelativePose", added to the pose of the original node.
- If the coordinates of any node can not be computed (no arcs,...), an exception will be raised.
Definition at line 479 of file CHierarchicalMapMHPartition.cpp.
References MRPT_END, MRPT_START, and MRPT_UNUSED_PARAM.
◆ writeToMatlab()
|
inlinevirtualinherited |
Introduces a pure virtual method responsible for writing to a mxArray Matlab object, typically a MATLAB struct whose contents are documented in each derived class.
- Returns
- A new
mxArray(caller is responsible of memory freeing) or NULL is class does not support conversion to MATLAB.
Definition at line 79 of file CSerializable.h.
◆ writeToStream()
|
protectedvirtual |
Introduces a pure virtual method responsible for writing to a CStream.
This can not be used directly be users, instead use "stream << object;" for writing it to a stream.
- Parameters
-
out The output binary stream where object must be dumped. getVersion If NULL, the object must be dumped. If not, only the version of the object dump must be returned in this pointer. This enables the versioning of objects dumping and backward compatibility with previously stored data.
- Exceptions
-
std::exception On any error, see CStream::WriteBuffer
- See also
- CStream
Implements mrpt::utils::CSerializable.
Definition at line 65 of file CHierarchicalMHMap.cpp.
References version.
Friends And Related Function Documentation
◆ CHMHMapArc
|
friend |
Definition at line 33 of file CHierarchicalMHMap.h.
◆ CHMHMapNode
|
friend |
Definition at line 34 of file CHierarchicalMHMap.h.
Member Data Documentation
◆ _init_CHierarchicalMHMap
|
staticprotected |
Definition at line 37 of file CHierarchicalMHMap.h.
◆ classCHierarchicalMHMap
|
static |
Definition at line 37 of file CHierarchicalMHMap.h.
◆ classCObject
|
staticinherited |
◆ classCSerializable
|
staticinherited |
Definition at line 42 of file CSerializable.h.
◆ classinfo
|
static |
Definition at line 37 of file CHierarchicalMHMap.h.
◆ m_arcs
|
protectedinherited |
Definition at line 41 of file CHierarchicalMapMHPartition.h.
◆ m_nodes
|
protectedinherited |
The internal list of nodes and arcs in the whole hierarchical model.
The objects must be deleted only in the CHierarchicalMap class, not in partitions only objects.
Definition at line 40 of file CHierarchicalMapMHPartition.h.