Detailed Description
template<class TDATA, size_t STATE_LEN>
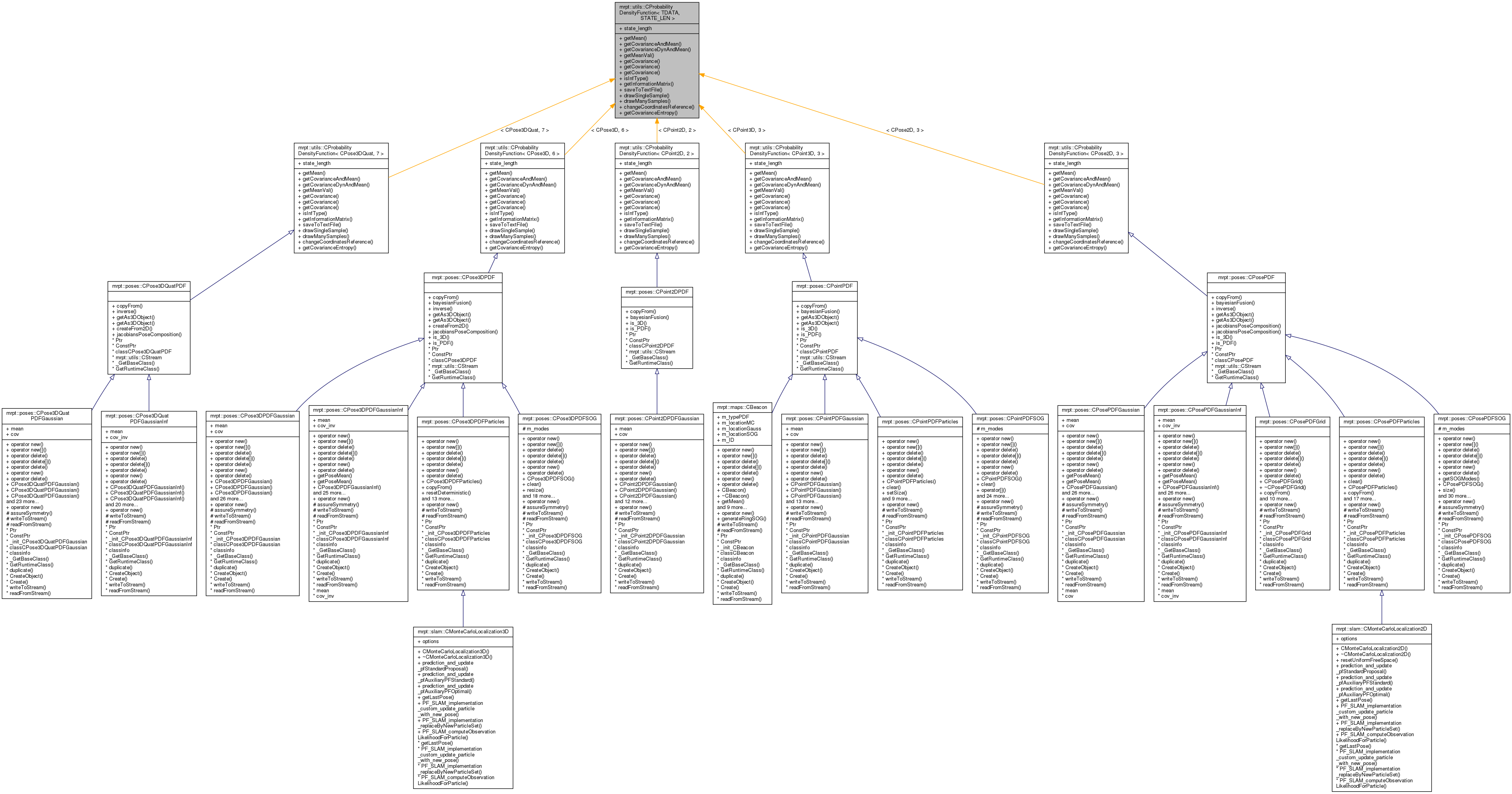
class mrpt::utils::CProbabilityDensityFunction< TDATA, STATE_LEN >
A generic template for probability density distributions (PDFs).
This template is used as base for many classes in mrpt::poses Any derived class must implement getMean() and a getCovarianceAndMean(). Other methods such as getMean() or getCovariance() are implemented here for convenience.
- See also
- mprt::poses::CPosePDF, mprt::poses::CPose3DPDF, mprt::poses::CPointPDF
Definition at line 28 of file CProbabilityDensityFunction.h.
#include <mrpt/utils/CProbabilityDensityFunction.h>
Public Types | |
| typedef TDATA | type_value |
| The type of the state the PDF represents. More... | |
| typedef CProbabilityDensityFunction< TDATA, STATE_LEN > | self_t |
Public Member Functions | |
| virtual void | getMean (TDATA &mean_point) const =0 |
| Returns the mean, or mathematical expectation of the probability density distribution (PDF). More... | |
| virtual void | getCovarianceAndMean (mrpt::math::CMatrixFixedNumeric< double, STATE_LEN, STATE_LEN > &cov, TDATA &mean_point) const =0 |
| Returns an estimate of the pose covariance matrix (STATE_LENxSTATE_LEN cov matrix) and the mean, both at once. More... | |
| void | getCovarianceDynAndMean (mrpt::math::CMatrixDouble &cov, TDATA &mean_point) const |
| Returns an estimate of the pose covariance matrix (STATE_LENxSTATE_LEN cov matrix) and the mean, both at once. More... | |
| TDATA | getMeanVal () const |
| Returns the mean, or mathematical expectation of the probability density distribution (PDF). More... | |
| void | getCovariance (mrpt::math::CMatrixDouble &cov) const |
| Returns the estimate of the covariance matrix (STATE_LEN x STATE_LEN covariance matrix) More... | |
| void | getCovariance (mrpt::math::CMatrixFixedNumeric< double, STATE_LEN, STATE_LEN > &cov) const |
| Returns the estimate of the covariance matrix (STATE_LEN x STATE_LEN covariance matrix) More... | |
| mrpt::math::CMatrixFixedNumeric< double, STATE_LEN, STATE_LEN > | getCovariance () const |
| Returns the estimate of the covariance matrix (STATE_LEN x STATE_LEN covariance matrix) More... | |
| virtual bool | isInfType () const |
| Returns whether the class instance holds the uncertainty in covariance or information form. More... | |
| virtual void | getInformationMatrix (mrpt::math::CMatrixFixedNumeric< double, STATE_LEN, STATE_LEN > &inf) const |
| Returns the information (inverse covariance) matrix (a STATE_LEN x STATE_LEN matrix) Unless reimplemented in derived classes, this method first reads the covariance, then invert it. More... | |
| virtual void | saveToTextFile (const std::string &file) const =0 |
| Save PDF's particles to a text file. More... | |
| virtual void | drawSingleSample (TDATA &outPart) const =0 |
| Draws a single sample from the distribution. More... | |
| virtual void | drawManySamples (size_t N, std::vector< mrpt::math::CVectorDouble > &outSamples) const |
| Draws a number of samples from the distribution, and saves as a list of 1xSTATE_LEN vectors, where each row contains a (x,y,z,yaw,pitch,roll) datum. More... | |
| virtual void | changeCoordinatesReference (const mrpt::poses::CPose3D &newReferenceBase)=0 |
| this = p (+) this. More... | |
| double | getCovarianceEntropy () const |
| Compute the entropy of the estimated covariance matrix. More... | |
Static Public Attributes | |
| static const size_t | state_length = STATE_LEN |
| The length of the variable, for example, 3 for a 3D point, 6 for a 3D pose (x y z yaw pitch roll). More... | |
Member Typedef Documentation
◆ self_t
| typedef CProbabilityDensityFunction<TDATA, STATE_LEN> mrpt::utils::CProbabilityDensityFunction< TDATA, STATE_LEN >::self_t |
Definition at line 33 of file CProbabilityDensityFunction.h.
◆ type_value
| typedef TDATA mrpt::utils::CProbabilityDensityFunction< TDATA, STATE_LEN >::type_value |
The type of the state the PDF represents.
Definition at line 32 of file CProbabilityDensityFunction.h.
Member Function Documentation
◆ changeCoordinatesReference()
|
pure virtual |
this = p (+) this.
This can be used to convert a PDF from local coordinates to global, providing the point (newReferenceBase) from which "to project" the current pdf. Result PDF substituted the currently stored one in the object.
Implemented in mrpt::maps::CBeacon, mrpt::poses::CPosePDFSOG, mrpt::poses::CPosePDFParticles, mrpt::poses::CPosePDFGrid, mrpt::poses::CPosePDFGaussianInf, mrpt::poses::CPosePDFGaussian, mrpt::poses::CPose3DQuatPDFGaussianInf, mrpt::poses::CPose3DQuatPDFGaussian, mrpt::poses::CPose3DPDFSOG, mrpt::poses::CPose3DPDFParticles, mrpt::poses::CPose3DPDFGaussianInf, mrpt::poses::CPose3DPDFGaussian, mrpt::poses::CPointPDFSOG, mrpt::poses::CPointPDFParticles, mrpt::poses::CPointPDFGaussian, and mrpt::poses::CPoint2DPDFGaussian.
◆ drawManySamples()
|
inlinevirtual |
Draws a number of samples from the distribution, and saves as a list of 1xSTATE_LEN vectors, where each row contains a (x,y,z,yaw,pitch,roll) datum.
This base method just call N times to drawSingleSample, but derived classes should implemented optimized method for each particular PDF.
Reimplemented in mrpt::poses::CPosePDFSOG, mrpt::poses::CPosePDFGrid, mrpt::poses::CPosePDFGaussianInf, mrpt::poses::CPosePDFGaussian, mrpt::poses::CPose3DQuatPDFGaussianInf, mrpt::poses::CPose3DQuatPDFGaussian, mrpt::poses::CPose3DPDFSOG, mrpt::poses::CPose3DPDFParticles, mrpt::poses::CPose3DPDFGaussianInf, and mrpt::poses::CPose3DPDFGaussian.
Definition at line 125 of file CProbabilityDensityFunction.h.
References mrpt::utils::CProbabilityDensityFunction< TDATA, STATE_LEN >::drawSingleSample().
◆ drawSingleSample()
|
pure virtual |
Draws a single sample from the distribution.
Referenced by mrpt::utils::CProbabilityDensityFunction< TDATA, STATE_LEN >::drawManySamples().
◆ getCovariance() [1/3]
|
inline |
Returns the estimate of the covariance matrix (STATE_LEN x STATE_LEN covariance matrix)
- See also
- getMean, getInformationMatrix
Definition at line 86 of file CProbabilityDensityFunction.h.
References mrpt::math::cov(), mrpt::utils::CProbabilityDensityFunction< TDATA, STATE_LEN >::getCovarianceAndMean(), and mrpt::math::UNINITIALIZED_MATRIX.
Referenced by mrpt::utils::CProbabilityDensityFunction< TDATA, STATE_LEN >::getCovarianceEntropy().
◆ getCovariance() [2/3]
|
inline |
Returns the estimate of the covariance matrix (STATE_LEN x STATE_LEN covariance matrix)
- See also
- getMean, getCovarianceAndMean, getInformationMatrix
Definition at line 68 of file CProbabilityDensityFunction.h.
References mrpt::utils::CProbabilityDensityFunction< TDATA, STATE_LEN >::getCovarianceDynAndMean().
Referenced by mrpt::poses::CPosePDFGaussian::copyFrom(), mrpt::poses::CPosePDFGaussianInf::copyFrom(), mrpt::poses::CPosePDFSOG::copyFrom(), mrpt::poses::CPoseRandomSampler::getOriginalPDFCov2D(), mrpt::poses::CPoseRandomSampler::getOriginalPDFCov3D(), and mrpt::maps::CMultiMetricMapPDF::prediction_and_update_pfOptimalProposal().
◆ getCovariance() [3/3]
|
inline |
Returns the estimate of the covariance matrix (STATE_LEN x STATE_LEN covariance matrix)
- See also
- getMean, getCovarianceAndMean, getInformationMatrix
Definition at line 77 of file CProbabilityDensityFunction.h.
References mrpt::utils::CProbabilityDensityFunction< TDATA, STATE_LEN >::getCovarianceAndMean().
◆ getCovarianceAndMean()
|
pure virtual |
Returns an estimate of the pose covariance matrix (STATE_LENxSTATE_LEN cov matrix) and the mean, both at once.
- See also
- getMean, getInformationMatrix
Referenced by mrpt::poses::CPoint2DPDFGaussian::copyFrom(), mrpt::poses::CPointPDFGaussian::copyFrom(), mrpt::poses::CPointPDFSOG::copyFrom(), mrpt::poses::CPose3DPDFGaussian::copyFrom(), mrpt::poses::CPose3DPDFGaussianInf::copyFrom(), mrpt::poses::CPose3DPDFSOG::copyFrom(), mrpt::poses::CPose3DQuatPDFGaussian::copyFrom(), mrpt::poses::CPose3DQuatPDFGaussianInf::copyFrom(), mrpt::utils::CProbabilityDensityFunction< TDATA, STATE_LEN >::getCovariance(), mrpt::utils::CProbabilityDensityFunction< TDATA, STATE_LEN >::getCovarianceDynAndMean(), and mrpt::utils::CProbabilityDensityFunction< TDATA, STATE_LEN >::getInformationMatrix().
◆ getCovarianceDynAndMean()
|
inline |
Returns an estimate of the pose covariance matrix (STATE_LENxSTATE_LEN cov matrix) and the mean, both at once.
- See also
- getMean, getInformationMatrix
Definition at line 48 of file CProbabilityDensityFunction.h.
References mrpt::math::cov(), mrpt::utils::CProbabilityDensityFunction< TDATA, STATE_LEN >::getCovarianceAndMean(), and mrpt::math::UNINITIALIZED_MATRIX.
Referenced by mrpt::utils::CProbabilityDensityFunction< TDATA, STATE_LEN >::getCovariance().
◆ getCovarianceEntropy()
|
inline |
Compute the entropy of the estimated covariance matrix.
Definition at line 144 of file CProbabilityDensityFunction.h.
References det(), and mrpt::utils::CProbabilityDensityFunction< TDATA, STATE_LEN >::getCovariance().
Referenced by mrpt::maps::CMultiMetricMapPDF::getCurrentEntropyOfPaths().
◆ getInformationMatrix()
|
inlinevirtual |
Returns the information (inverse covariance) matrix (a STATE_LEN x STATE_LEN matrix) Unless reimplemented in derived classes, this method first reads the covariance, then invert it.
- See also
- getMean, getCovarianceAndMean
Definition at line 106 of file CProbabilityDensityFunction.h.
References mrpt::math::cov(), mrpt::utils::CProbabilityDensityFunction< TDATA, STATE_LEN >::getCovarianceAndMean(), and mrpt::math::UNINITIALIZED_MATRIX.
◆ getMean()
|
pure virtual |
Returns the mean, or mathematical expectation of the probability density distribution (PDF).
- See also
- getCovarianceAndMean, getInformationMatrix
Referenced by mrpt::poses::CPosePDFGaussian::copyFrom(), mrpt::poses::CPosePDFGaussianInf::copyFrom(), mrpt::poses::CPosePDFSOG::copyFrom(), and mrpt::utils::CProbabilityDensityFunction< TDATA, STATE_LEN >::getMeanVal().
◆ getMeanVal()
|
inline |
Returns the mean, or mathematical expectation of the probability density distribution (PDF).
- See also
- getCovariance, getInformationMatrix
Definition at line 58 of file CProbabilityDensityFunction.h.
References mrpt::utils::CProbabilityDensityFunction< TDATA, STATE_LEN >::getMean().
Referenced by mrpt::poses::CPosePDFGaussian::copyFrom(), mrpt::poses::CPosePDFGaussianInf::copyFrom(), mrpt::slam::CMetricMapBuilderRBPF::initialize(), mrpt::slam::CMetricMapBuilderICP::initialize(), and mrpt::slam::CMetricMapBuilderICP::processObservation().
◆ isInfType()
|
inlinevirtual |
Returns whether the class instance holds the uncertainty in covariance or information form.
- Note
- By default this is going to be covariance form. *Inf classes (e.g. CPosePDFGaussianInf) store it in information form.
- See also
- mrpt::traits::is_inf_type
Reimplemented in mrpt::poses::CPosePDFGaussianInf, mrpt::poses::CPose3DQuatPDFGaussianInf, and mrpt::poses::CPose3DPDFGaussianInf.
Definition at line 100 of file CProbabilityDensityFunction.h.
◆ saveToTextFile()
|
pure virtual |
Save PDF's particles to a text file.
See derived classes for more information about the format of generated files.
Implemented in mrpt::maps::CBeacon, mrpt::poses::CPosePDFSOG, mrpt::poses::CPosePDFParticles, mrpt::poses::CPosePDFGaussianInf, mrpt::poses::CPosePDFGaussian, mrpt::poses::CPose3DQuatPDFGaussianInf, mrpt::poses::CPose3DQuatPDFGaussian, mrpt::poses::CPose3DPDFSOG, mrpt::poses::CPose3DPDFParticles, mrpt::poses::CPose3DPDFGaussianInf, mrpt::poses::CPose3DPDFGaussian, mrpt::poses::CPointPDFSOG, mrpt::poses::CPointPDFParticles, mrpt::poses::CPointPDFGaussian, mrpt::poses::CPoint2DPDFGaussian, and mrpt::poses::CPosePDFGrid.
Member Data Documentation
◆ state_length
|
static |
The length of the variable, for example, 3 for a 3D point, 6 for a 3D pose (x y z yaw pitch roll).
Definition at line 31 of file CProbabilityDensityFunction.h.