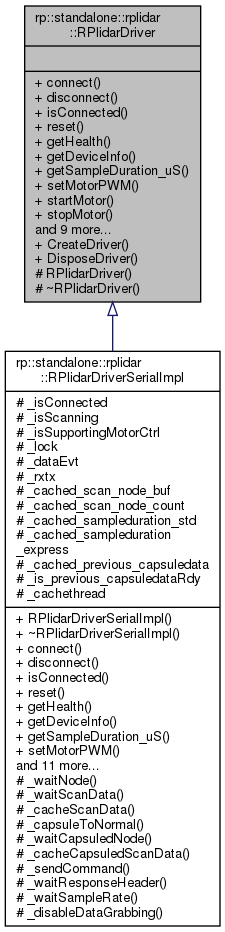
Detailed Description
Definition at line 44 of file rplidar_driver.h.
#include <rplidar/include/rplidar_driver.h>
Public Types | |
| enum | { DEFAULT_TIMEOUT = 2000 } |
| enum | { DRIVER_TYPE_SERIALPORT = 0x0 } |
Public Member Functions | |
| virtual u_result | connect (const char *port_path, _u32 baudrate, _u32 flag=0)=0 |
| Open the specified serial port and connect to a target RPLIDAR device. More... | |
| virtual void | disconnect ()=0 |
| Disconnect with the RPLIDAR and close the serial port. More... | |
| virtual bool | isConnected ()=0 |
| Returns TRUE when the connection has been established. More... | |
| virtual u_result | reset (_u32 timeout=DEFAULT_TIMEOUT)=0 |
| Ask the RPLIDAR core system to reset it self The host system can use the Reset operation to help RPLIDAR escape the self-protection mode. More... | |
| virtual u_result | getHealth (rplidar_response_device_health_t &health, _u32 timeout=DEFAULT_TIMEOUT)=0 |
| Retrieve the health status of the RPLIDAR The host system can use this operation to check whether RPLIDAR is in the self-protection mode. More... | |
| virtual u_result | getDeviceInfo (rplidar_response_device_info_t &info, _u32 timeout=DEFAULT_TIMEOUT)=0 |
| Get the device information of the RPLIDAR include the serial number, firmware version, device model etc. More... | |
| virtual u_result | getSampleDuration_uS (rplidar_response_sample_rate_t &rateInfo, _u32 timeout=DEFAULT_TIMEOUT)=0 |
| Get the sample duration information of the RPLIDAR. More... | |
| virtual u_result | setMotorPWM (_u16 pwm)=0 |
| Set the RPLIDAR's motor pwm when using accessory board, currently valid for A2 only. More... | |
| virtual u_result | startMotor ()=0 |
| Start RPLIDAR's motor when using accessory board. More... | |
| virtual u_result | stopMotor ()=0 |
| Stop RPLIDAR's motor when using accessory board. More... | |
| virtual u_result | checkMotorCtrlSupport (bool &support, _u32 timeout=DEFAULT_TIMEOUT)=0 |
| Check whether the device support motor control. More... | |
| virtual u_result | getFrequency (bool inExpressMode, size_t count, float &frequency, bool &is4kmode)=0 |
| Calcuate RPLIDAR's current scanning frequency from the given scan data Please refer to the application note doc for details Remark: the calcuation will be incorrect if the specified scan data doesn't contains enough data. More... | |
| virtual u_result | startScan (bool force=false, bool autoExpressMode=true)=0 |
| Ask the RPLIDAR core system to enter the scan mode(Normal/Express, Express mode is 4k mode) A background thread will be created by the RPLIDAR driver to fetch the scan data continuously. More... | |
| virtual u_result | startScanNormal (bool force, _u32 timeout=DEFAULT_TIMEOUT)=0 |
| virtual u_result | startScanExpress (bool fixedAngle, _u32 timeout=DEFAULT_TIMEOUT)=0 |
| virtual u_result | checkExpressScanSupported (bool &support, _u32 timeout=DEFAULT_TIMEOUT)=0 |
| Check whether the device support express mode. More... | |
| virtual u_result | stop (_u32 timeout=DEFAULT_TIMEOUT)=0 |
| Ask the RPLIDAR core system to stop the current scan operation and enter idle state. More... | |
| virtual u_result | grabScanData (rplidar_response_measurement_node_t *nodebuffer, size_t &count, _u32 timeout=DEFAULT_TIMEOUT)=0 |
| Wait and grab a complete 0-360 degree scan data previously received. More... | |
| virtual u_result | ascendScanData (rplidar_response_measurement_node_t *nodebuffer, size_t count)=0 |
| Ascending the scan data according to the angle value in the scan. More... | |
Static Public Member Functions | |
| static RPlidarDriver * | CreateDriver (_u32 drivertype=DRIVER_TYPE_SERIALPORT) |
| Create an RPLIDAR Driver Instance This interface should be invoked first before any other operations. More... | |
| static void | DisposeDriver (RPlidarDriver *drv) |
| Dispose the RPLIDAR Driver Instance specified by the drv parameter Applications should invoke this interface when the driver instance is no longer used in order to free memory. More... | |
Protected Member Functions | |
| RPlidarDriver () | |
| virtual | ~RPlidarDriver () |
Member Enumeration Documentation
◆ anonymous enum
| anonymous enum |
| Enumerator | |
|---|---|
| DEFAULT_TIMEOUT | |
Definition at line 46 of file rplidar_driver.h.
◆ anonymous enum
| anonymous enum |
| Enumerator | |
|---|---|
| DRIVER_TYPE_SERIALPORT | |
Definition at line 50 of file rplidar_driver.h.
Constructor & Destructor Documentation
◆ RPlidarDriver()
|
inlineprotected |
Definition at line 201 of file rplidar_driver.h.
◆ ~RPlidarDriver()
|
inlineprotectedvirtual |
Definition at line 202 of file rplidar_driver.h.
Member Function Documentation
◆ ascendScanData()
|
pure virtual |
Ascending the scan data according to the angle value in the scan.
- Parameters
-
nodebuffer Buffer provided by the caller application to do the reorder. Should be retrived from the grabScanData count The caller must initialize this parameter to set the max data count of the provided buffer (in unit of rplidar_response_measurement_node_t). Once the interface returns, this parameter will store the actual received data count. The interface will return RESULT_OPERATION_FAIL when all the scan data is invalid.
Implemented in rp::standalone::rplidar::RPlidarDriverSerialImpl.
◆ checkExpressScanSupported()
|
pure virtual |
Check whether the device support express mode.
- Parameters
-
support Return the result. timeout The operation timeout value (in millisecond) for the serial port communication.
Implemented in rp::standalone::rplidar::RPlidarDriverSerialImpl.
◆ checkMotorCtrlSupport()
|
pure virtual |
Check whether the device support motor control.
Note: this API will disable grab.
- Parameters
-
support Return the result. timeout The operation timeout value (in millisecond) for the serial port communication.
Implemented in rp::standalone::rplidar::RPlidarDriverSerialImpl.
◆ connect()
|
pure virtual |
Open the specified serial port and connect to a target RPLIDAR device.
- Parameters
-
port_path the device path of the serial port e.g. on Windows, it may be com3 or \.\com10 on Unix-Like OS, it may be /dev/ttyS1, /dev/ttyUSB2, etc baudrate the baudrate used For most RPLIDAR models, the baudrate should be set to 115200 flag other flags Reserved for future use, always set to Zero
Implemented in rp::standalone::rplidar::RPlidarDriverSerialImpl.
◆ CreateDriver()
|
static |
Create an RPLIDAR Driver Instance This interface should be invoked first before any other operations.
- Parameters
-
drivertype the connection type used by the driver.
Definition at line 50 of file rplidar_driver.cpp.
References DRIVER_TYPE_SERIALPORT.
◆ disconnect()
|
pure virtual |
Disconnect with the RPLIDAR and close the serial port.
Implemented in rp::standalone::rplidar::RPlidarDriverSerialImpl.
◆ DisposeDriver()
|
static |
Dispose the RPLIDAR Driver Instance specified by the drv parameter Applications should invoke this interface when the driver instance is no longer used in order to free memory.
Definition at line 61 of file rplidar_driver.cpp.
◆ getDeviceInfo()
|
pure virtual |
Get the device information of the RPLIDAR include the serial number, firmware version, device model etc.
- Parameters
-
info The device information returned from the RPLIDAR timeout The operation timeout value (in millisecond) for the serial port communication
Implemented in rp::standalone::rplidar::RPlidarDriverSerialImpl.
◆ getFrequency()
|
pure virtual |
Calcuate RPLIDAR's current scanning frequency from the given scan data Please refer to the application note doc for details Remark: the calcuation will be incorrect if the specified scan data doesn't contains enough data.
- Parameters
-
inExpressMode Indicate whether the RPLIDAR is in express mode count The number of sample nodes inside the given buffer frequency The scanning frequency (in HZ) calcuated by the interface. is4kmode Return whether the RPLIDAR is working on 4k sample rate mode.
Implemented in rp::standalone::rplidar::RPlidarDriverSerialImpl.
◆ getHealth()
|
pure virtual |
Retrieve the health status of the RPLIDAR The host system can use this operation to check whether RPLIDAR is in the self-protection mode.
- Parameters
-
health The health status info returned from the RPLIDAR timeout The operation timeout value (in millisecond) for the serial port communication
Implemented in rp::standalone::rplidar::RPlidarDriverSerialImpl.
◆ getSampleDuration_uS()
|
pure virtual |
Get the sample duration information of the RPLIDAR.
- Parameters
-
rateInfo The sample duration information returned from the RPLIDAR timeout The operation timeout value (in millisecond) for the serial port communication
Implemented in rp::standalone::rplidar::RPlidarDriverSerialImpl.
◆ grabScanData()
|
pure virtual |
Wait and grab a complete 0-360 degree scan data previously received.
The grabbed scan data returned by this interface always has the following charactistics:
1) The first node of the grabbed data array (nodebuffer[0]) must be the first sample of a scan, i.e. the start_bit == 1 2) All data nodes are belong to exactly ONE complete 360-degrees's scan 3) Note, the angle data in one scan may not be ascending. You can use API ascendScanData to reorder the nodebuffer.
- Parameters
-
nodebuffer Buffer provided by the caller application to store the scan data count The caller must initialize this parameter to set the max data count of the provided buffer (in unit of rplidar_response_measurement_node_t). Once the interface returns, this parameter will store the actual received data count. timeout Max duration allowed to wait for a complete scan data, nothing will be stored to the nodebuffer if a complete 360-degrees' scan data cannot to be ready timely.
The interface will return RESULT_OPERATION_TIMEOUT to indicate that no complete 360-degrees' scan can be retrieved withing the given timeout duration.
\The caller application can set the timeout value to Zero(0) to make this interface always returns immediately to achieve non-block operation.
Implemented in rp::standalone::rplidar::RPlidarDriverSerialImpl.
◆ isConnected()
|
pure virtual |
Returns TRUE when the connection has been established.
Implemented in rp::standalone::rplidar::RPlidarDriverSerialImpl.
◆ reset()
|
pure virtual |
Ask the RPLIDAR core system to reset it self The host system can use the Reset operation to help RPLIDAR escape the self-protection mode.
Implemented in rp::standalone::rplidar::RPlidarDriverSerialImpl.
◆ setMotorPWM()
Set the RPLIDAR's motor pwm when using accessory board, currently valid for A2 only.
- Parameters
-
pwm The motor pwm value would like to set
Implemented in rp::standalone::rplidar::RPlidarDriverSerialImpl.
◆ startMotor()
|
pure virtual |
Start RPLIDAR's motor when using accessory board.
Implemented in rp::standalone::rplidar::RPlidarDriverSerialImpl.
◆ startScan()
|
pure virtual |
Ask the RPLIDAR core system to enter the scan mode(Normal/Express, Express mode is 4k mode) A background thread will be created by the RPLIDAR driver to fetch the scan data continuously.
User Application can use the grabScanData() interface to retrieved the scan data cached previous by this background thread.
- Parameters
-
force Force the core system to output scan data regardless whether the scanning motor is rotating or not. autoExpressMode Force the core system to trying express mode first, if the system does not support express mode, it will use normal mode. timeout The operation timeout value (in millisecond) for the serial port communication.
Implemented in rp::standalone::rplidar::RPlidarDriverSerialImpl.
◆ startScanExpress()
|
pure virtual |
Implemented in rp::standalone::rplidar::RPlidarDriverSerialImpl.
◆ startScanNormal()
|
pure virtual |
Implemented in rp::standalone::rplidar::RPlidarDriverSerialImpl.
◆ stop()
|
pure virtual |
Ask the RPLIDAR core system to stop the current scan operation and enter idle state.
The background thread will be terminated
- Parameters
-
timeout The operation timeout value (in millisecond) for the serial port communication
Implemented in rp::standalone::rplidar::RPlidarDriverSerialImpl.
◆ stopMotor()
|
pure virtual |
Stop RPLIDAR's motor when using accessory board.
Implemented in rp::standalone::rplidar::RPlidarDriverSerialImpl.