Detailed Description
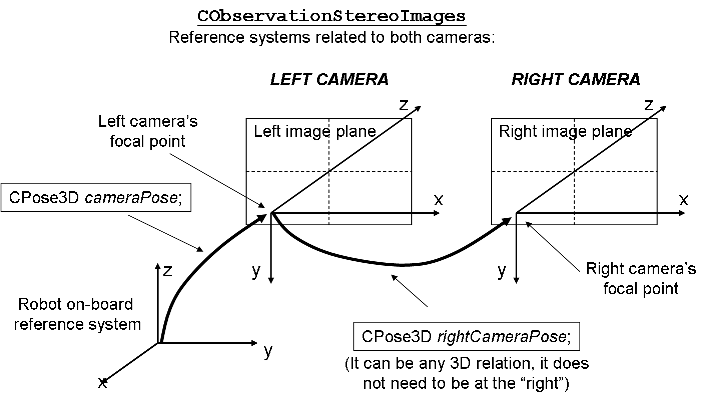
Observation class for either a pair of left+right or left+disparity images from a stereo camera.
To find whether the observation contains a right image and/or a disparity image, see the fields hasImageDisparity and hasImageRight, respectively. This figure illustrates the coordinate frames involved in this class:
- Note
- The images stored in this class can be raw or undistorted images. In the latter case, the "distortion" params of the corresponding "leftCamera" and "rightCamera" fields should be all zeros.
- See also
- CObservation
Definition at line 38 of file CObservationStereoImages.h.
#include <mrpt/obs/CObservationStereoImages.h>
Public Member Functions | |
| CObservationStereoImages ()=default | |
| void | getSensorPose (mrpt::poses::CPose3D &out_sensorPose) const override |
| A general method to retrieve the sensor pose on the robot. More... | |
| void | setSensorPose (const mrpt::poses::CPose3D &newSensorPose) override |
| A general method to change the sensor pose on the robot. More... | |
| void | getDescriptionAsText (std::ostream &o) const override |
| Build a detailed, multi-line textual description of the observation contents and dump it to the output stream. More... | |
| void | swap (CObservationStereoImages &o) |
| Do an efficient swap of all data members of this object with "o". More... | |
| void | load () const override |
| Makes sure all images and other fields which may be externally stored are loaded in memory. More... | |
| template<class METRICMAP > | |
| bool | insertObservationInto (METRICMAP *theMap, const mrpt::poses::CPose3D *robotPose=nullptr) const |
| This method is equivalent to: More... | |
| void | getSensorPose (mrpt::math::TPose3D &out_sensorPose) const |
| A general method to retrieve the sensor pose on the robot. More... | |
| void | setSensorPose (const mrpt::math::TPose3D &newSensorPose) |
| A general method to change the sensor pose on the robot. More... | |
| std::string | getDescriptionAsTextValue () const |
| Return by value version of getDescriptionAsText(std::ostream&) More... | |
| virtual mxArray * | writeToMatlab () const |
Introduces a pure virtual method responsible for writing to a mxArray Matlab object, typically a MATLAB struct whose contents are documented in each derived class. More... | |
Delayed-load manual control methods. | |
| virtual void | unload () |
| Unload all images, for the case they being delayed-load images stored in external files (othewise, has no effect). More... | |
RTTI classes and functions for polymorphic hierarchies | |
| mrpt::rtti::CObject::Ptr | duplicateGetSmartPtr () const |
| Makes a deep copy of the object and returns a smart pointer to it. More... | |
Protected Member Functions | |
| void | swap (CObservation &o) |
| Swap with another observation, ONLY the data defined here in the base class CObservation. More... | |
CSerializable virtual methods | |
| uint8_t | serializeGetVersion () const override |
| Must return the current versioning number of the object. More... | |
| void | serializeTo (mrpt::serialization::CArchive &out) const override |
| Pure virtual method for writing (serializing) to an abstract archive. More... | |
| void | serializeFrom (mrpt::serialization::CArchive &in, uint8_t serial_version) override |
| Pure virtual method for reading (deserializing) from an abstract archive. More... | |
CSerializable virtual methods | |
| virtual void | serializeTo (CSchemeArchiveBase &out) const |
| Virtual method for writing (serializing) to an abstract schema based archive. More... | |
| virtual void | serializeFrom (CSchemeArchiveBase &in) |
| Virtual method for reading (deserializing) from an abstract schema based archive. More... | |
Data common to any observation | |
| mrpt::system::TTimeStamp | timestamp {mrpt::system::now()} |
| The associated UTC time-stamp. More... | |
| std::string | sensorLabel |
| An arbitrary label that can be used to identify the sensor. More... | |
| mrpt::system::TTimeStamp | getTimeStamp () const |
| Returns CObservation::timestamp for all kind of observations. More... | |
| virtual mrpt::system::TTimeStamp | getOriginalReceivedTimeStamp () const |
| By default, returns CObservation::timestamp but in sensors capable of satellite (or otherwise) accurate UTC timing of readings, this contains the computer-based timestamp of reception, which may be slightly different than timestamp. More... | |
RTTI stuff | |
| using | Ptr = std::shared_ptr< mrpt::obs ::CObservationStereoImages > |
| using | ConstPtr = std::shared_ptr< const mrpt::obs ::CObservationStereoImages > |
| using | UniquePtr = std::unique_ptr< mrpt::obs ::CObservationStereoImages > |
| using | ConstUniquePtr = std::unique_ptr< const mrpt::obs ::CObservationStereoImages > |
| static const mrpt::rtti::TRuntimeClassId | runtimeClassId |
| static constexpr const char * | className = "mrpt::obs" "::" "CObservationStereoImages" |
| static const mrpt::rtti::TRuntimeClassId * | _GetBaseClass () |
| static constexpr auto | getClassName () |
| static const mrpt::rtti::TRuntimeClassId & | GetRuntimeClassIdStatic () |
| static std::shared_ptr< CObject > | CreateObject () |
| template<typename... Args> | |
| static Ptr | Create (Args &&... args) |
| template<typename Alloc , typename... Args> | |
| static Ptr | CreateAlloc (const Alloc &alloc, Args &&... args) |
| template<typename... Args> | |
| static UniquePtr | CreateUnique (Args &&... args) |
| virtual const mrpt::rtti::TRuntimeClassId * | GetRuntimeClass () const override |
| Returns information about the class of an object in runtime. More... | |
| virtual mrpt::rtti::CObject * | clone () const override |
| Returns a deep copy (clone) of the object, indepently of its class. More... | |
Main observation data members | |
| mrpt::img::CImage | imageLeft |
| Image from the left camera (this image will be ALWAYS present) More... | |
| mrpt::img::CImage | imageRight |
| Image from the right camera, only contains a valid image if hasImageRight == true. More... | |
| mrpt::img::CImage | imageDisparity |
| Disparity image, only contains a valid image if hasImageDisparity == true. More... | |
| bool | hasImageDisparity {false} |
| Whether imageDisparity actually contains data (Default upon construction: false) More... | |
| bool | hasImageRight {false} |
| Whether imageRight actually contains data (Default upon construction: true) More... | |
| mrpt::img::TCamera | leftCamera |
| Parameters for the left/right cameras: individual intrinsic and distortion parameters of the cameras. More... | |
| mrpt::img::TCamera | rightCamera |
| mrpt::poses::CPose3DQuat | cameraPose |
| The pose of the LEFT camera, relative to the robot. More... | |
| mrpt::poses::CPose3DQuat | rightCameraPose |
| The pose of the right camera, relative to the left one: Note that using the conventional reference coordinates for the left camera (x points to the right, y down), the "right" camera is situated at position (BL, 0, 0) with yaw=pitch=roll=0, where BL is the BASELINE. More... | |
| void | getStereoCameraParams (mrpt::img::TStereoCamera &out_params) const |
| Populates a TStereoCamera structure with the parameters in leftCamera, rightCamera and rightCameraPose. More... | |
| void | setStereoCameraParams (const mrpt::img::TStereoCamera &in_params) |
| Sets leftCamera, rightCamera and rightCameraPose from a TStereoCamera structure. More... | |
| bool | areImagesRectified () const |
| This method only checks whether ALL the distortion parameters in leftCamera are set to zero, which is the convention in MRPT to denote that this pair of stereo images has been rectified. More... | |
Member Typedef Documentation
◆ ConstPtr
| using mrpt::obs::CObservationStereoImages::ConstPtr = std::shared_ptr<const mrpt::obs :: CObservationStereoImages > |
Definition at line 40 of file CObservationStereoImages.h.
◆ ConstUniquePtr
| using mrpt::obs::CObservationStereoImages::ConstUniquePtr = std::unique_ptr<const mrpt::obs :: CObservationStereoImages > |
Definition at line 40 of file CObservationStereoImages.h.
◆ Ptr
| using mrpt::obs::CObservationStereoImages::Ptr = std::shared_ptr< mrpt::obs :: CObservationStereoImages > |
A type for the associated smart pointer
Definition at line 40 of file CObservationStereoImages.h.
◆ UniquePtr
| using mrpt::obs::CObservationStereoImages::UniquePtr = std::unique_ptr< mrpt::obs :: CObservationStereoImages > |
Definition at line 40 of file CObservationStereoImages.h.
Constructor & Destructor Documentation
◆ CObservationStereoImages()
|
default |
Member Function Documentation
◆ _GetBaseClass()
|
staticprotected |
◆ areImagesRectified()
| bool CObservationStereoImages::areImagesRectified | ( | ) | const |
This method only checks whether ALL the distortion parameters in leftCamera are set to zero, which is the convention in MRPT to denote that this pair of stereo images has been rectified.
Definition at line 197 of file CObservationStereoImages.cpp.
◆ clone()
|
overridevirtual |
Returns a deep copy (clone) of the object, indepently of its class.
Implements mrpt::rtti::CObject.
◆ Create()
|
inlinestatic |
Definition at line 40 of file CObservationStereoImages.h.
◆ CreateAlloc()
|
inlinestatic |
Definition at line 40 of file CObservationStereoImages.h.
◆ CreateObject()
|
static |
◆ CreateUnique()
|
inlinestatic |
Definition at line 40 of file CObservationStereoImages.h.
◆ duplicateGetSmartPtr()
|
inlineinherited |
Makes a deep copy of the object and returns a smart pointer to it.
Definition at line 204 of file CObject.h.
References mrpt::rtti::CObject::clone().
Referenced by mrpt::obs::CRawlog::insert().
◆ getClassName()
|
inlinestatic |
Definition at line 40 of file CObservationStereoImages.h.
◆ getDescriptionAsText()
|
overridevirtual |
Build a detailed, multi-line textual description of the observation contents and dump it to the output stream.
- Note
- If overried by derived classes, call base CObservation::getDescriptionAsText() first to show common information.
- This is the text that appears in RawLogViewer when selecting an object in the dataset
Reimplemented from mrpt::obs::CObservation.
Definition at line 223 of file CObservationStereoImages.cpp.
References mrpt::img::TStereoCamera::dumpAsText(), mrpt::format(), mrpt::obs::CObservation::getDescriptionAsText(), and mrpt::img::TStereoCamera::rightCameraPose.
◆ getDescriptionAsTextValue()
|
inherited |
Return by value version of getDescriptionAsText(std::ostream&)
Definition at line 59 of file CObservation.cpp.
◆ getOriginalReceivedTimeStamp()
|
inlinevirtualinherited |
By default, returns CObservation::timestamp but in sensors capable of satellite (or otherwise) accurate UTC timing of readings, this contains the computer-based timestamp of reception, which may be slightly different than timestamp.
- See also
- getTimeStamp()
Reimplemented in mrpt::obs::CObservationVelodyneScan, mrpt::obs::CObservationGPS, and mrpt::obs::CObservationRotatingScan.
Definition at line 71 of file CObservation.h.
References mrpt::obs::CObservation::timestamp.
◆ GetRuntimeClass()
|
overridevirtual |
Returns information about the class of an object in runtime.
Reimplemented from mrpt::obs::CObservation.
◆ GetRuntimeClassIdStatic()
|
static |
◆ getSensorPose() [1/2]
|
inlineoverridevirtual |
A general method to retrieve the sensor pose on the robot.
Note that most sensors will return a full (6D) CPose3D, but see the derived classes for more details or special cases.
- See also
- setSensorPose
Implements mrpt::obs::CObservation.
Definition at line 109 of file CObservationStereoImages.h.
References cameraPose.
◆ getSensorPose() [2/2]
|
inherited |
A general method to retrieve the sensor pose on the robot.
Note that most sensors will return a full (6D) CPose3D, but see the derived classes for more details or special cases.
- See also
- setSensorPose
Definition at line 24 of file CObservation.cpp.
References mrpt::poses::CPose3D::asTPose().
◆ getStereoCameraParams()
| void CObservationStereoImages::getStereoCameraParams | ( | mrpt::img::TStereoCamera & | out_params | ) | const |
Populates a TStereoCamera structure with the parameters in leftCamera, rightCamera and rightCameraPose.
- See also
- areImagesRectified()
Definition at line 174 of file CObservationStereoImages.cpp.
References mrpt::img::TStereoCamera::leftCamera, mrpt::img::TStereoCamera::rightCamera, and mrpt::img::TStereoCamera::rightCameraPose.
Referenced by mrpt::vision::CStereoRectifyMap::setFromCamParams().
◆ getTimeStamp()
|
inlineinherited |
Returns CObservation::timestamp for all kind of observations.
- See also
- getOriginalReceivedTimeStamp()
Definition at line 66 of file CObservation.h.
References mrpt::obs::CObservation::timestamp.
◆ insertObservationInto()
|
inlineinherited |
This method is equivalent to:
- Parameters
-
theMap The map where this observation is to be inserted: the map will be updated. robotPose The pose of the robot base for this observation, relative to the target metric map. Set to nullptr (default) to use (0,0,0deg)
- Returns
- Returns true if the map has been updated, or false if this observations has nothing to do with a metric map (for example, a sound observation).
See: Maps and observations compatibility matrix
- See also
- CMetricMap, CMetricMap::insertObservation
Definition at line 99 of file CObservation.h.
◆ load()
|
overridevirtual |
Makes sure all images and other fields which may be externally stored are loaded in memory.
Note that for all CImages, calling load() is not required since the images will be automatically loaded upon first access, so load() shouldn't be needed to be called in normal cases by the user. If all the data were alredy loaded or this object has no externally stored data fields, calling this method has no effects.
- See also
- unload
Reimplemented from mrpt::obs::CObservation.
Definition at line 281 of file CObservationStereoImages.cpp.
◆ serializeFrom() [1/2]
|
overrideprotectedvirtual |
Pure virtual method for reading (deserializing) from an abstract archive.
Users don't call this method directly. Instead, use stream >> object;.
- Parameters
-
in The input binary stream where the object data must read from. version The version of the object stored in the stream: use this version number in your code to know how to read the incoming data.
- Exceptions
-
std::exception On any I/O error
Implements mrpt::serialization::CSerializable.
Definition at line 43 of file CObservationStereoImages.cpp.
References INVALID_TIMESTAMP, and MRPT_THROW_UNKNOWN_SERIALIZATION_VERSION.
◆ serializeFrom() [2/2]
|
inlineprotectedvirtualinherited |
Virtual method for reading (deserializing) from an abstract schema based archive.
Definition at line 74 of file CSerializable.h.
References mrpt::serialization::CSerializable::GetRuntimeClass(), and THROW_EXCEPTION.
◆ serializeGetVersion()
|
overrideprotectedvirtual |
Must return the current versioning number of the object.
Start in zero for new classes, and increments each time there is a change in the stored format.
Implements mrpt::serialization::CSerializable.
Definition at line 29 of file CObservationStereoImages.cpp.
◆ serializeTo() [1/2]
|
overrideprotectedvirtual |
Pure virtual method for writing (serializing) to an abstract archive.
Users don't call this method directly. Instead, use stream << object;.
- Exceptions
-
std::exception On any I/O error
Implements mrpt::serialization::CSerializable.
Definition at line 30 of file CObservationStereoImages.cpp.
References out.
◆ serializeTo() [2/2]
|
inlineprotectedvirtualinherited |
Virtual method for writing (serializing) to an abstract schema based archive.
Definition at line 64 of file CSerializable.h.
References mrpt::serialization::CSerializable::GetRuntimeClass(), and THROW_EXCEPTION.
◆ setSensorPose() [1/2]
|
inlineoverridevirtual |
A general method to change the sensor pose on the robot.
Note that most sensors will use the full (6D) CPose3D, but see the derived classes for more details or special cases.
- See also
- getSensorPose
Implements mrpt::obs::CObservation.
Definition at line 113 of file CObservationStereoImages.h.
References cameraPose.
◆ setSensorPose() [2/2]
|
inherited |
A general method to change the sensor pose on the robot.
Note that most sensors will use the full (6D) CPose3D, but see the derived classes for more details or special cases.
- See also
- getSensorPose
Definition at line 31 of file CObservation.cpp.
◆ setStereoCameraParams()
| void CObservationStereoImages::setStereoCameraParams | ( | const mrpt::img::TStereoCamera & | in_params | ) |
Sets leftCamera, rightCamera and rightCameraPose from a TStereoCamera structure.
Definition at line 184 of file CObservationStereoImages.cpp.
References mrpt::img::TStereoCamera::leftCamera, mrpt::img::TStereoCamera::rightCamera, and mrpt::img::TStereoCamera::rightCameraPose.
Referenced by mrpt::hwdrivers::CDUO3DCamera::getObservations(), and mrpt::vision::CStereoRectifyMap::rectify().
◆ swap() [1/2]
|
protectedinherited |
Swap with another observation, ONLY the data defined here in the base class CObservation.
It's protected since it'll be only called from child classes that should know what else to swap appart from these common data.
Definition at line 36 of file CObservation.cpp.
References mrpt::obs::CObservation::sensorLabel, and mrpt::obs::CObservation::timestamp.
Referenced by swap().
◆ swap() [2/2]
| void CObservationStereoImages::swap | ( | CObservationStereoImages & | o | ) |
Do an efficient swap of all data members of this object with "o".
Definition at line 205 of file CObservationStereoImages.cpp.
References cameraPose, hasImageDisparity, hasImageRight, imageDisparity, imageLeft, imageRight, leftCamera, rightCamera, rightCameraPose, and mrpt::obs::CObservation::swap().
◆ unload()
|
inlinevirtualinherited |
Unload all images, for the case they being delayed-load images stored in external files (othewise, has no effect).
- See also
- load
Reimplemented in mrpt::obs::CObservation3DRangeScan, and mrpt::obs::CObservationPointCloud.
Definition at line 164 of file CObservation.h.
◆ writeToMatlab()
|
inlinevirtualinherited |
Introduces a pure virtual method responsible for writing to a mxArray Matlab object, typically a MATLAB struct whose contents are documented in each derived class.
- Returns
- A new
mxArray(caller is responsible of memory freeing) or nullptr is class does not support conversion to MATLAB.
Definition at line 90 of file CSerializable.h.
Member Data Documentation
◆ cameraPose
| mrpt::poses::CPose3DQuat mrpt::obs::CObservationStereoImages::cameraPose |
The pose of the LEFT camera, relative to the robot.
Definition at line 80 of file CObservationStereoImages.h.
Referenced by mrpt::hwdrivers::CImageGrabber_FlyCapture2::getObservation(), getSensorPose(), mrpt::maps::CLandmarksMap::loadSiftFeaturesFromStereoImageObservation(), mrpt::vision::CStereoRectifyMap::rectify(), setSensorPose(), mrpt::vision::StereoObs2BRObs(), and swap().
◆ className
|
static |
Definition at line 40 of file CObservationStereoImages.h.
◆ hasImageDisparity
| bool mrpt::obs::CObservationStereoImages::hasImageDisparity {false} |
Whether imageDisparity actually contains data (Default upon construction: false)
Definition at line 66 of file CObservationStereoImages.h.
Referenced by swap(), and mrpt::ros1bridge::toROS().
◆ hasImageRight
| bool mrpt::obs::CObservationStereoImages::hasImageRight {false} |
Whether imageRight actually contains data (Default upon construction: true)
Definition at line 69 of file CObservationStereoImages.h.
Referenced by mrpt::hwdrivers::CImageGrabber_FlyCapture2::getObservation(), mrpt::vision::CStereoRectifyMap::rectify(), and swap().
◆ imageDisparity
| mrpt::img::CImage mrpt::obs::CObservationStereoImages::imageDisparity |
Disparity image, only contains a valid image if hasImageDisparity == true.
The relation between the actual disparity and pixels and each value in this image is... ???????????
Definition at line 62 of file CObservationStereoImages.h.
Referenced by swap(), and mrpt::ros1bridge::toROS().
◆ imageLeft
| mrpt::img::CImage mrpt::obs::CObservationStereoImages::imageLeft |
Image from the left camera (this image will be ALWAYS present)
- See also
- areImagesRectified()
Definition at line 52 of file CObservationStereoImages.h.
Referenced by mrpt::hwdrivers::CImageGrabber_dc1394::getObservation(), mrpt::hwdrivers::CImageGrabber_FlyCapture2::getObservation(), mrpt::hwdrivers::CDUO3DCamera::getObservations(), mrpt::maps::CLandmarksMap::loadSiftFeaturesFromStereoImageObservation(), mrpt::vision::CStereoRectifyMap::rectify(), mrpt::vision::StereoObs2BRObs(), swap(), and mrpt::ros1bridge::toROS().
◆ imageRight
| mrpt::img::CImage mrpt::obs::CObservationStereoImages::imageRight |
Image from the right camera, only contains a valid image if hasImageRight == true.
- See also
- areImagesRectified()
Definition at line 56 of file CObservationStereoImages.h.
Referenced by mrpt::hwdrivers::CImageGrabber_dc1394::getObservation(), mrpt::hwdrivers::CImageGrabber_FlyCapture2::getObservation(), mrpt::hwdrivers::CDUO3DCamera::getObservations(), mrpt::maps::CLandmarksMap::loadSiftFeaturesFromStereoImageObservation(), mrpt::vision::CStereoRectifyMap::rectify(), mrpt::vision::StereoObs2BRObs(), swap(), and mrpt::ros1bridge::toROS().
◆ leftCamera
| mrpt::img::TCamera mrpt::obs::CObservationStereoImages::leftCamera |
Parameters for the left/right cameras: individual intrinsic and distortion parameters of the cameras.
See the tutorial for a discussion of these parameters.
Definition at line 77 of file CObservationStereoImages.h.
Referenced by mrpt::hwdrivers::CImageGrabber_FlyCapture2::getObservation(), mrpt::maps::CLandmarksMap::loadSiftFeaturesFromStereoImageObservation(), mrpt::vision::StereoObs2BRObs(), and swap().
◆ rightCamera
| mrpt::img::TCamera mrpt::obs::CObservationStereoImages::rightCamera |
Definition at line 77 of file CObservationStereoImages.h.
Referenced by mrpt::hwdrivers::CImageGrabber_FlyCapture2::getObservation(), and swap().
◆ rightCameraPose
| mrpt::poses::CPose3DQuat mrpt::obs::CObservationStereoImages::rightCameraPose |
The pose of the right camera, relative to the left one: Note that using the conventional reference coordinates for the left camera (x points to the right, y down), the "right" camera is situated at position (BL, 0, 0) with yaw=pitch=roll=0, where BL is the BASELINE.
Definition at line 88 of file CObservationStereoImages.h.
Referenced by mrpt::hwdrivers::CImageGrabber_FlyCapture2::getObservation(), mrpt::maps::CLandmarksMap::loadSiftFeaturesFromStereoImageObservation(), mrpt::vision::CStereoRectifyMap::rectify(), mrpt::vision::StereoObs2BRObs(), and swap().
◆ runtimeClassId
|
staticprotected |
Definition at line 40 of file CObservationStereoImages.h.
◆ sensorLabel
|
inherited |
An arbitrary label that can be used to identify the sensor.
Definition at line 62 of file CObservation.h.
Referenced by mrpt::ros1bridge::convert(), mrpt::obs::CObservation3DRangeScan::convertTo2DScan(), mrpt::hwdrivers::CSICKTim561Eth::decodeScan(), mrpt::hwdrivers::CLMS100Eth::decodeScan(), mrpt::hwdrivers::CRaePID::doProcess(), mrpt::hwdrivers::CRoboPeakLidar::doProcessSimple(), mrpt::hwdrivers::CSickLaserUSB::doProcessSimple(), mrpt::hwdrivers::CCANBusReader::doProcessSimple(), mrpt::hwdrivers::CSickLaserSerial::doProcessSimple(), mrpt::hwdrivers::CHokuyoURG::doProcessSimple(), mrpt::apps::RawlogGrabberApp::dump_GPS_mode_info(), mrpt::hwdrivers::CGPSInterface::flushParsedMessagesNow(), mrpt::obs::CObservationRotatingScan::fromScan2D(), mrpt::obs::CObservationRotatingScan::fromVelodyne(), mrpt::hwdrivers::CRaePID::getFullInfo(), mrpt::hwdrivers::CSwissRanger3DCamera::getNextObservation(), mrpt::hwdrivers::CKinect::getNextObservation(), mrpt::hwdrivers::CBoardSonars::getObservation(), mrpt::hwdrivers::CWirelessPower::getObservation(), mrpt::hwdrivers::CImpinjRFID::getObservation(), mrpt::hwdrivers::CEnoseModular::getObservation(), mrpt::hwdrivers::CBoardENoses::getObservation(), mrpt::hwdrivers::CNationalInstrumentsDAQ::grabbing_thread(), mrpt::obs::CObservation6DFeatures::serializeFrom(), mrpt::obs::CObservationPointCloud::serializeFrom(), mrpt::obs::CObservation6DFeatures::serializeTo(), mrpt::obs::CObservationPointCloud::serializeTo(), mrpt::obs::CObservation::swap(), and mrpt::ros1bridge::toROS().
◆ timestamp
|
inherited |
The associated UTC time-stamp.
Where available, this should contain the accurate satellite-based timestamp of the sensor reading.
Definition at line 60 of file CObservation.h.
Referenced by mrpt::ros1bridge::convert(), mrpt::obs::CObservation3DRangeScan::convertTo2DScan(), mrpt::hwdrivers::CSICKTim561Eth::decodeScan(), mrpt::hwdrivers::CLMS100Eth::decodeScan(), mrpt::detectors::CObjectDetection::detectObjects(), mrpt::hwdrivers::CRaePID::doProcess(), mrpt::hwdrivers::CGPSInterface::doProcess(), mrpt::hwdrivers::CRoboPeakLidar::doProcessSimple(), mrpt::hwdrivers::CSickLaserUSB::doProcessSimple(), mrpt::hwdrivers::CCANBusReader::doProcessSimple(), mrpt::hwdrivers::CSickLaserSerial::doProcessSimple(), mrpt::hwdrivers::CHokuyoURG::doProcessSimple(), mrpt::hwdrivers::CGPSInterface::flushParsedMessagesNow(), mrpt::ros1bridge::fromROS(), mrpt::obs::CObservationRotatingScan::fromScan2D(), mrpt::obs::CObservationRotatingScan::fromVelodyne(), mrpt::hwdrivers::CRaePID::getFullInfo(), mrpt::hwdrivers::CSwissRanger3DCamera::getNextObservation(), mrpt::hwdrivers::COpenNI2_RGBD360::getNextObservation(), mrpt::hwdrivers::CKinect::getNextObservation(), mrpt::hwdrivers::CBoardSonars::getObservation(), mrpt::hwdrivers::CWirelessPower::getObservation(), mrpt::hwdrivers::CImageGrabber_OpenCV::getObservation(), mrpt::hwdrivers::CEnoseModular::getObservation(), mrpt::hwdrivers::CBoardENoses::getObservation(), mrpt::hwdrivers::CImageGrabber_dc1394::getObservation(), mrpt::hwdrivers::CImageGrabber_FlyCapture2::getObservation(), mrpt::hwdrivers::CDUO3DCamera::getObservations(), mrpt::obs::CObservation::getOriginalReceivedTimeStamp(), mrpt::obs::CObservation::getTimeStamp(), mrpt::hwdrivers::CNationalInstrumentsDAQ::grabbing_thread(), mrpt::maps::CLandmarksMap::loadOccupancyFeaturesFrom2DRangeScan(), mrpt::maps::CLandmarksMap::loadSiftFeaturesFromImageObservation(), mrpt::maps::CLandmarksMap::loadSiftFeaturesFromStereoImageObservation(), mrpt::hwdrivers::CGPSInterface::parse_NMEA(), mrpt::apps::KFSLAMApp::Run_KF_SLAM(), mrpt::obs::CObservation6DFeatures::serializeFrom(), mrpt::obs::CObservationPointCloud::serializeFrom(), mrpt::obs::CObservation6DFeatures::serializeTo(), mrpt::obs::CObservationPointCloud::serializeTo(), mrpt::maps::CLandmarksMap::simulateBeaconReadings(), mrpt::maps::CLandmarksMap::simulateRangeBearingReadings(), mrpt::obs::CObservation::swap(), mrpt::ros1bridge::toROS(), and velodyne_scan_to_pointcloud().