Detailed Description
A range or depth 3D scan measurement, as from a time-of-flight range camera or a structured-light depth RGBD sensor.
This kind of observations can carry one or more of these data fields:
- 3D point cloud (as float's).
- Each 3D point has its associated (u,v) pixel coordinates in points3D_idxs_x & points3D_idxs_y (New in MRPT 1.4.0)
- 2D range image (as a matrix): Each entry in the matrix "rangeImage(ROW,COLUMN)" contains a distance or a depth, depending on range_is_depth. Ranges are stored as uint16_t for efficiency. The units of ranges are stored separately in rangeUnits.
- 2D intensity (grayscale or RGB) image (as a mrpt::img::CImage): For SwissRanger cameras, a logarithmic A-law compression is used to convert the original 16bit intensity to a more standard 8bit graylevel.
- 2D confidence image (as a mrpt::img::CImage): For each pixel, a 0x00 and a 0xFF mean the lowest and highest confidence levels, respectively.
- Semantic labels: Stored as a matrix of bitfields, each bit having a user-defined meaning.
- For cameras supporting multiple returns per pixels, different layers of range images are available in the map rangeImageOtherLayers.
The coordinates of the 3D point cloud are in meters with respect to the depth camera origin of coordinates (in SwissRanger, the front face of the camera: a small offset ~1cm in front of the physical focal point), with the +X axis pointing forward, +Y pointing left-hand and +Z pointing up. By convention, a 3D point with its coordinates set to (0,0,0), will be considered as invalid. The field CObservation3DRangeScan::relativePoseIntensityWRTDepth describes the change of coordinates from the depth camera to the intensity (RGB or grayscale) camera. In a SwissRanger camera both cameras coincide, so this pose is just a rotation (0,0,0,-90deg,0,-90deg). But in Microsoft Kinect there is also an offset, as shown in this figure:
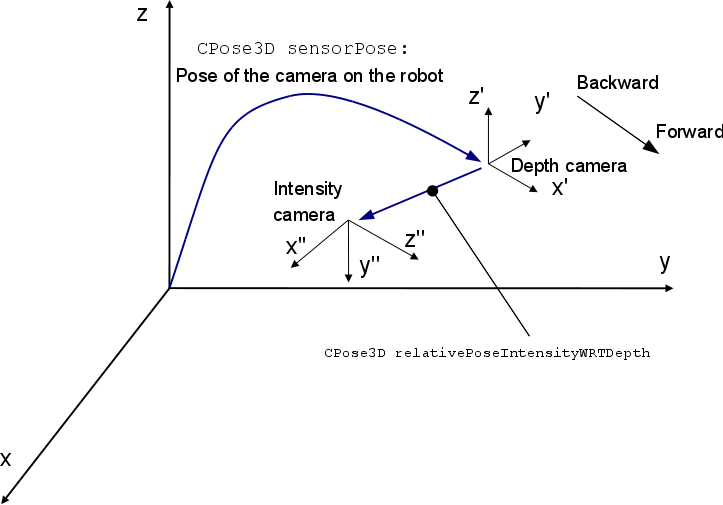
In any case, check the field relativePoseIntensityWRTDepth, or the method doDepthAndIntensityCamerasCoincide() to determine if both frames of reference coincide, since even for Kinect cameras both can coincide if the images have been rectified.
The 2D images and matrices are stored as common images, with an up->down rows order and left->right, as usual. Optionally, the intensity and confidence channels can be set to delayed-load images for off-rawlog storage so it saves memory by having loaded in memory just the needed images. See the methods load() and unload(). Due to the intensive storage requirements of this kind of observations, this observation is the only one in MRPT for which it's recommended to always call "load()" and "unload()" before and after using the observation, ONLY when the observation was read from a rawlog dataset, in order to make sure that all the externally stored data fields are loaded and ready in memory.
Classes that grab observations of this type are:
There are two sets of calibration parameters (see mrpt::vision::checkerBoardStereoCalibration() or the ready-to-use GUI program kinect-calibrate):
- cameraParams: Projection parameters of the depth camera.
- cameraParamsIntensity: Projection parameters of the intensity (gray-level or RGB) camera.
In some cameras, like SwissRanger, both are the same. It is possible in Kinect to rectify the range images such both cameras seem to coincide and then both sets of camera parameters will be identical.
Range data can be interpreted in two different ways depending on the 3D camera (this field is already set to the correct setting when grabbing observations from an mrpt::hwdrivers sensor):
- range_is_depth=true -> Kinect-like ranges: entries of rangeImage are distances along the +X (front-facing) axis.
- range_is_depth=false -> Ranges in rangeImage are actual distances in 3D.
The "intensity" channel may come from different channels in sesnsors as Kinect. Look at field intensityImageChannel to find out if the image was grabbed from the visible (RGB) or IR channels.
3D point clouds can be generated at any moment after grabbing with CObservation3DRangeScan::unprojectInto(), provided the correct calibration parameters. Note that unprojectInto() will store the point cloud in sensor-centric local coordinates. Use unprojectInto() to directly obtain vehicle or world coordinates.
Example of how to assign labels to pixels (for object segmentation, semantic information, etc.):
- Note
- Starting at serialization version 2 (MRPT 0.9.1+), the confidence channel is stored as an image instead of a matrix to optimize memory and disk space.
- Starting at serialization version 3 (MRPT 0.9.1+), the 3D point cloud and the rangeImage can both be stored externally to save rawlog space.
- Starting at serialization version 5 (MRPT 0.9.5+), the new field range_is_depth
- Starting at serialization version 6 (MRPT 0.9.5+), the new field intensityImageChannel
- Starting at serialization version 7 (MRPT 1.3.1+), new fields for semantic labeling
-
Since MRPT 1.5.0, external files format can be selected at runtime with
CObservation3DRangeScan::EXTERNALS_AS_TEXT
Definition at line 168 of file CObservation3DRangeScan.h.
#include <mrpt/obs/CObservation3DRangeScan.h>
Classes | |
| struct | unproject_LUT_t |
| Look-up-table struct for unprojectInto() More... | |
Public Member Functions | |
| CObservation3DRangeScan ()=default | |
| ~CObservation3DRangeScan () override | |
| template<class POINTMAP > | |
| void | unprojectInto (POINTMAP &dest_pointcloud, const T3DPointsProjectionParams &projectParams=T3DPointsProjectionParams(), const TRangeImageFilterParams &filterParams=TRangeImageFilterParams()) |
| Unprojects the RGB+D image pair into a 3D point cloud (with color if the target map supports it) and optionally at a given 3D pose. More... | |
| void | convertTo2DScan (mrpt::obs::CObservation2DRangeScan &out_scan2d, const T3DPointsTo2DScanParams &scanParams, const TRangeImageFilterParams &filterParams=TRangeImageFilterParams()) |
| Convert this 3D observation into an "equivalent 2D fake laser scan", with a configurable vertical FOV. More... | |
| void | undistort () |
| Removes the distortion in both, depth and intensity images. More... | |
| void | getDescriptionAsText (std::ostream &o) const override |
| Build a detailed, multi-line textual description of the observation contents and dump it to the output stream. More... | |
| void | swap (CObservation3DRangeScan &o) |
| Very efficient method to swap the contents of two observations. More... | |
| void | getZoneAsObs (CObservation3DRangeScan &obs, const unsigned int &r1, const unsigned int &r2, const unsigned int &c1, const unsigned int &c2) |
| Extract a ROI of the 3D observation as a new one. More... | |
| const unproject_LUT_t & | get_unproj_lut () const |
| Gets (or generates upon first request) the 3D point cloud projection look-up-table for the current depth camera intrinsics & distortion parameters. More... | |
| template<class METRICMAP > | |
| bool | insertObservationInto (METRICMAP *theMap, const mrpt::poses::CPose3D *robotPose=nullptr) const |
| This method is equivalent to: More... | |
| void | getSensorPose (mrpt::math::TPose3D &out_sensorPose) const |
| A general method to retrieve the sensor pose on the robot. More... | |
| void | setSensorPose (const mrpt::math::TPose3D &newSensorPose) |
| A general method to change the sensor pose on the robot. More... | |
| std::string | getDescriptionAsTextValue () const |
| Return by value version of getDescriptionAsText(std::ostream&) More... | |
| virtual mxArray * | writeToMatlab () const |
Introduces a pure virtual method responsible for writing to a mxArray Matlab object, typically a MATLAB struct whose contents are documented in each derived class. More... | |
Delayed-load manual control methods. | |
| void | load () const override |
| Makes sure all images and other fields which may be externally stored are loaded in memory. More... | |
| void | unload () override |
| Unload all images, for the case they being delayed-load images stored in external files (othewise, has no effect). More... | |
Point cloud external storage functions | |
| bool | points3D_isExternallyStored () const |
| std::string | points3D_getExternalStorageFile () const |
| void | points3D_getExternalStorageFileAbsolutePath (std::string &out_path) const |
| std::string | points3D_getExternalStorageFileAbsolutePath () const |
| void | points3D_convertToExternalStorage (const std::string &fileName, const std::string &use_this_base_dir) |
| Users won't normally want to call this, it's only used from internal MRPT programs. More... | |
| void | points3D_overrideExternalStoredFlag (bool isExternal) |
| Users normally won't need to use this. More... | |
Range Matrix external storage functions | |
| bool | rangeImage_isExternallyStored () const |
| std::string | rangeImage_getExternalStorageFile (const std::string &rangeImageLayer) const |
| void | rangeImage_getExternalStorageFileAbsolutePath (std::string &out_path, const std::string &rangeImageLayer) const |
| rangeImageLayer: Empty for the main rangeImage matrix, otherwise, a key of rangeImageOtherLayers More... | |
| std::string | rangeImage_getExternalStorageFileAbsolutePath (const std::string &rangeImageLayer) const |
| void | rangeImage_convertToExternalStorage (const std::string &fileName, const std::string &use_this_base_dir) |
| Users won't normally want to call this, it's only used from internal MRPT programs. More... | |
| void | rangeImage_forceResetExternalStorage () |
| Forces marking this observation as non-externally stored - it doesn't anything else apart from reseting the corresponding flag (Users won't normally want to call this, it's only used from internal MRPT programs) More... | |
RTTI classes and functions for polymorphic hierarchies | |
| mrpt::rtti::CObject::Ptr | duplicateGetSmartPtr () const |
| Makes a deep copy of the object and returns a smart pointer to it. More... | |
Static Public Member Functions | |
| static void | EXTERNALS_AS_TEXT (bool value) |
Whether external files (3D points, range and confidence) are to be saved as .txt text files (MATLAB compatible) or *.bin binary (faster). More... | |
| static bool | EXTERNALS_AS_TEXT () |
| static double | recoverCameraCalibrationParameters (const CObservation3DRangeScan &in_obs, mrpt::img::TCamera &out_camParams, const double camera_offset=0.01) |
| A Levenberg-Marquart-based optimizer to recover the calibration parameters of a 3D camera given a range (depth) image and the corresponding 3D point cloud. More... | |
Public Attributes | |
Confidence "channel" | |
| bool | hasConfidenceImage {false} |
| true means the field confidenceImage contains valid data More... | |
| mrpt::img::CImage | confidenceImage |
| If hasConfidenceImage=true, an image with the "confidence" value [range 0-255] as estimated by the capture drivers. More... | |
Protected Member Functions | |
| void | swap (CObservation &o) |
| Swap with another observation, ONLY the data defined here in the base class CObservation. More... | |
CSerializable virtual methods | |
| uint8_t | serializeGetVersion () const override |
| Must return the current versioning number of the object. More... | |
| void | serializeTo (mrpt::serialization::CArchive &out) const override |
| Pure virtual method for writing (serializing) to an abstract archive. More... | |
| void | serializeFrom (mrpt::serialization::CArchive &in, uint8_t serial_version) override |
| Pure virtual method for reading (deserializing) from an abstract archive. More... | |
CSerializable virtual methods | |
| virtual void | serializeTo (CSchemeArchiveBase &out) const |
| Virtual method for writing (serializing) to an abstract schema based archive. More... | |
| virtual void | serializeFrom (CSchemeArchiveBase &in) |
| Virtual method for reading (deserializing) from an abstract schema based archive. More... | |
Protected Attributes | |
| bool | m_points3D_external_stored {false} |
| If set to true, m_points3D_external_file is valid. More... | |
| std::string | m_points3D_external_file |
| 3D points are in CImage::getImagesPathBase()+<this_file_name> More... | |
| bool | m_rangeImage_external_stored {false} |
| If set to true, m_rangeImage_external_file is valid. More... | |
| std::string | m_rangeImage_external_file |
| rangeImage is in CImage::getImagesPathBase()+<this_file_name> More... | |
Data common to any observation | |
| mrpt::system::TTimeStamp | timestamp {mrpt::system::now()} |
| The associated UTC time-stamp. More... | |
| std::string | sensorLabel |
| An arbitrary label that can be used to identify the sensor. More... | |
| mrpt::system::TTimeStamp | getTimeStamp () const |
| Returns CObservation::timestamp for all kind of observations. More... | |
| virtual mrpt::system::TTimeStamp | getOriginalReceivedTimeStamp () const |
| By default, returns CObservation::timestamp but in sensors capable of satellite (or otherwise) accurate UTC timing of readings, this contains the computer-based timestamp of reception, which may be slightly different than timestamp. More... | |
RTTI stuff | |
| using | Ptr = std::shared_ptr< mrpt::obs ::CObservation3DRangeScan > |
| using | ConstPtr = std::shared_ptr< const mrpt::obs ::CObservation3DRangeScan > |
| using | UniquePtr = std::unique_ptr< mrpt::obs ::CObservation3DRangeScan > |
| using | ConstUniquePtr = std::unique_ptr< const mrpt::obs ::CObservation3DRangeScan > |
| static const mrpt::rtti::TRuntimeClassId | runtimeClassId |
| static constexpr const char * | className = "mrpt::obs" "::" "CObservation3DRangeScan" |
| static const mrpt::rtti::TRuntimeClassId * | _GetBaseClass () |
| static constexpr auto | getClassName () |
| static const mrpt::rtti::TRuntimeClassId & | GetRuntimeClassIdStatic () |
| static std::shared_ptr< CObject > | CreateObject () |
| template<typename... Args> | |
| static Ptr | Create (Args &&... args) |
| template<typename Alloc , typename... Args> | |
| static Ptr | CreateAlloc (const Alloc &alloc, Args &&... args) |
| template<typename... Args> | |
| static UniquePtr | CreateUnique (Args &&... args) |
| virtual const mrpt::rtti::TRuntimeClassId * | GetRuntimeClass () const override |
| Returns information about the class of an object in runtime. More... | |
| virtual mrpt::rtti::CObject * | clone () const override |
| Returns a deep copy (clone) of the object, indepently of its class. More... | |
Point cloud | |
| bool | hasPoints3D {false} |
| true means the field points3D contains valid data. More... | |
| std::vector< float > | points3D_x |
| If hasPoints3D=true, the (X,Y,Z) coordinates of the 3D point cloud detected by the camera. More... | |
| std::vector< float > | points3D_y |
| std::vector< float > | points3D_z |
| std::vector< uint16_t > | points3D_idxs_x |
| If hasPoints3D=true, the (x,y) pixel coordinates for each (X,Y,Z) point in points3D_x, points3D_y, points3D_z. More... | |
| std::vector< uint16_t > | points3D_idxs_y |
| void | resizePoints3DVectors (const size_t nPoints) |
| Use this method instead of resizing all three points3D_x, points3D_y & points3D_z to allow the usage of the internal memory pool. More... | |
| size_t | getScanSize () const |
| Get the size of the scan pointcloud. More... | |
Range (depth) image | |
| bool | hasRangeImage {false} |
| true means the field rangeImage contains valid data More... | |
| mrpt::math::CMatrix_u16 | rangeImage |
| If hasRangeImage=true, a matrix of floats with the range data as captured by the camera (in meters). More... | |
| std::map< std::string, mrpt::math::CMatrix_u16 > | rangeImageOtherLayers |
| Additional layer range/depth images. More... | |
| float | rangeUnits = 0.001f |
| The conversion factor from integer units in rangeImage and actual distances in meters. More... | |
| bool | range_is_depth {true} |
| true: Kinect-like ranges: entries of rangeImage are distances along the +X axis; false: Ranges in rangeImage are actual distances in 3D. More... | |
| static mrpt::img::CImage | rangeImageAsImage (const mrpt::math::CMatrix_u16 &ranges, float val_min, float val_max, float rangeUnits, const std::optional< mrpt::img::TColormap > color=std::nullopt) |
| Static method to convert a range matrix into an image. More... | |
| void | rangeImage_setSize (const int HEIGHT, const int WIDTH) |
| Similar to calling "rangeImage.setSize(H,W)" but this method provides memory pooling to speed-up the memory allocation. More... | |
| mrpt::img::CImage | rangeImage_getAsImage (const std::optional< mrpt::img::TColormap > color=std::nullopt, const std::optional< float > normMinRange=std::nullopt, const std::optional< float > normMaxRange=std::nullopt, const std::optional< std::string > additionalLayerName=std::nullopt) const |
| Builds a visualization from the rangeImage. More... | |
Intensity (RGB) channels | |
| enum | TIntensityChannelID { CH_VISIBLE = 0, CH_IR = 1 } |
| Enum type for intensityImageChannel. More... | |
| bool | hasIntensityImage {false} |
| true means the field intensityImage contains valid data More... | |
| mrpt::img::CImage | intensityImage |
| If hasIntensityImage=true, a color or gray-level intensity image of the same size than "rangeImage". More... | |
| TIntensityChannelID | intensityImageChannel {CH_VISIBLE} |
| The source of the intensityImage; typically the visible channel. More... | |
Pixel-wise classification labels (for semantic labeling, etc.) | |
| TPixelLabelInfoBase::Ptr | pixelLabels |
| All information about pixel labeling is stored in this (smart pointer to) structure; refer to TPixelLabelInfo for details on the contents User is responsible of creating a new object of the desired data type. More... | |
| bool | hasPixelLabels () const |
| Returns true if the field CObservation3DRangeScan::pixelLabels contains a non-NULL smart pointer. More... | |
Sensor parameters | |
| mrpt::img::TCamera | cameraParams |
| Projection parameters of the depth camera. More... | |
| mrpt::img::TCamera | cameraParamsIntensity |
| Projection parameters of the intensity (graylevel or RGB) camera. More... | |
| mrpt::poses::CPose3D | relativePoseIntensityWRTDepth |
| Relative pose of the intensity camera wrt the depth camera (which is the coordinates origin for this observation). More... | |
| float | maxRange {5.0f} |
| The maximum range allowed by the device, in meters (e.g. More... | |
| mrpt::poses::CPose3D | sensorPose |
| The 6D pose of the sensor on the robot. More... | |
| float | stdError {0.01f} |
| The "sigma" error of the device in meters, used while inserting the scan in an occupancy grid. More... | |
| bool | doDepthAndIntensityCamerasCoincide () const |
| Return true if relativePoseIntensityWRTDepth equals the pure rotation (0,0,0,-90deg,0,-90deg) (with a small comparison epsilon) More... | |
| void | getSensorPose (mrpt::poses::CPose3D &out_sensorPose) const override |
| A general method to retrieve the sensor pose on the robot. More... | |
| void | setSensorPose (const mrpt::poses::CPose3D &newSensorPose) override |
| A general method to change the sensor pose on the robot. More... | |
Member Typedef Documentation
◆ ConstPtr
| using mrpt::obs::CObservation3DRangeScan::ConstPtr = std::shared_ptr<const mrpt::obs :: CObservation3DRangeScan > |
Definition at line 170 of file CObservation3DRangeScan.h.
◆ ConstUniquePtr
| using mrpt::obs::CObservation3DRangeScan::ConstUniquePtr = std::unique_ptr<const mrpt::obs :: CObservation3DRangeScan > |
Definition at line 170 of file CObservation3DRangeScan.h.
◆ Ptr
| using mrpt::obs::CObservation3DRangeScan::Ptr = std::shared_ptr< mrpt::obs :: CObservation3DRangeScan > |
A type for the associated smart pointer
Definition at line 170 of file CObservation3DRangeScan.h.
◆ UniquePtr
| using mrpt::obs::CObservation3DRangeScan::UniquePtr = std::unique_ptr< mrpt::obs :: CObservation3DRangeScan > |
Definition at line 170 of file CObservation3DRangeScan.h.
Member Enumeration Documentation
◆ TIntensityChannelID
Enum type for intensityImageChannel.
| Enumerator | |
|---|---|
| CH_VISIBLE | Grayscale or RGB visible channel of the camera sensor. |
| CH_IR | Infrarred (IR) channel. |
Definition at line 471 of file CObservation3DRangeScan.h.
Constructor & Destructor Documentation
◆ CObservation3DRangeScan()
|
default |
◆ ~CObservation3DRangeScan()
|
override |
Definition at line 290 of file CObservation3DRangeScan.cpp.
References mempool_donate_range_matrix(), and mempool_donate_xyz_buffers().
Member Function Documentation
◆ _GetBaseClass()
|
staticprotected |
◆ clone()
|
overridevirtual |
Returns a deep copy (clone) of the object, indepently of its class.
Implements mrpt::rtti::CObject.
◆ convertTo2DScan()
| void CObservation3DRangeScan::convertTo2DScan | ( | mrpt::obs::CObservation2DRangeScan & | out_scan2d, |
| const T3DPointsTo2DScanParams & | scanParams, | ||
| const TRangeImageFilterParams & | filterParams = TRangeImageFilterParams() |
||
| ) |
Convert this 3D observation into an "equivalent 2D fake laser scan", with a configurable vertical FOV.
The result is a 2D laser scan with more "rays" (N) than columns has the 3D observation (W), exactly: N = W * oversampling_ratio. This oversampling is required since laser scans sample the space at evenly-separated angles, while a range camera follows a tangent-like distribution. By oversampling we make sure we don't leave "gaps" unseen by the virtual "2D laser".
All obstacles within a frustum are considered and the minimum distance is kept in each direction. The horizontal FOV of the frustum is automatically computed from the intrinsic parameters, but the vertical FOV must be provided by the user, and can be set to be assymetric which may be useful depending on the zone of interest where to look for obstacles.
All spatial transformations are riguorosly taken into account in this class, using the depth camera intrinsic calibration parameters.
The timestamp of the new object is copied from the 3D object. Obviously, a requisite for calling this method is the 3D observation having range data, i.e. hasRangeImage must be true. It's not needed to have RGB data nor the raw 3D point clouds for this method to work.
If scanParams.use_origin_sensor_pose is true, the points will be projected to 3D and then reprojected as seen from a different sensorPose at the vehicle frame origin. Otherwise (the default), the output 2D observation will share the sensorPose of the input 3D scan (using a more efficient algorithm that avoids trigonometric functions).
- Parameters
-
[out] out_scan2d The resulting 2D equivalent scan.
- See also
- The example in https://www.mrpt.org/tutorials/mrpt-examples/example-kinect-to-2d-laser-demo/
Definition at line 1196 of file CObservation3DRangeScan.cpp.
References mrpt::obs::T3DPointsTo2DScanParams::angle_inf, mrpt::obs::T3DPointsTo2DScanParams::angle_sup, mrpt::obs::CObservation2DRangeScan::aperture, ASSERT_ABOVE_, ASSERT_EQUAL_, mrpt::math::CMatrixDynamic< T >::cols(), mrpt::opengl::CPointCloud::Create(), mrpt::d2f(), mrpt::obs::TRangeImageFilter::do_range_filter(), mrpt::obs::CObservation2DRangeScan::getScanRange(), mrpt::keep_min(), mrpt::obs::CObservation2DRangeScan::maxRange, mrpt::obs::T3DPointsTo2DScanParams::oversampling_ratio, mrpt::obs::TRangeImageFilterParams::rangeMask_max, mrpt::obs::TRangeImageFilterParams::rangeMask_min, mrpt::obs::CObservation2DRangeScan::resizeScan(), mrpt::obs::CObservation2DRangeScan::resizeScanAndAssign(), mrpt::obs::CObservation2DRangeScan::rightToLeft, mrpt::round(), mrpt::math::CMatrixDynamic< T >::rows(), mrpt::obs::CObservation::sensorLabel, mrpt::obs::CObservation2DRangeScan::sensorPose, mrpt::obs::CObservation2DRangeScan::setScanRange(), mrpt::obs::CObservation2DRangeScan::setScanRangeValidity(), mrpt::obs::T3DPointsProjectionParams::takeIntoAccountSensorPoseOnRobot, mrpt::obs::CObservation::timestamp, mrpt::obs::detail::unprojectInto(), mrpt::obs::T3DPointsTo2DScanParams::use_origin_sensor_pose, mrpt::obs::T3DPointsTo2DScanParams::z_max, and mrpt::obs::T3DPointsTo2DScanParams::z_min.
◆ Create()
|
inlinestatic |
Definition at line 170 of file CObservation3DRangeScan.h.
◆ CreateAlloc()
|
inlinestatic |
Definition at line 170 of file CObservation3DRangeScan.h.
◆ CreateObject()
|
static |
◆ CreateUnique()
|
inlinestatic |
Definition at line 170 of file CObservation3DRangeScan.h.
◆ doDepthAndIntensityCamerasCoincide()
| bool CObservation3DRangeScan::doDepthAndIntensityCamerasCoincide | ( | ) | const |
Return true if relativePoseIntensityWRTDepth equals the pure rotation (0,0,0,-90deg,0,-90deg) (with a small comparison epsilon)
- See also
- relativePoseIntensityWRTDepth
Definition at line 1182 of file CObservation3DRangeScan.cpp.
References mrpt::poses::CPose3D::getRotationMatrix().
◆ duplicateGetSmartPtr()
|
inlineinherited |
Makes a deep copy of the object and returns a smart pointer to it.
Definition at line 204 of file CObject.h.
References mrpt::rtti::CObject::clone().
Referenced by mrpt::obs::CRawlog::insert().
◆ EXTERNALS_AS_TEXT() [1/2]
|
static |
Whether external files (3D points, range and confidence) are to be saved as .txt text files (MATLAB compatible) or *.bin binary (faster).
Loading always will determine the type by inspecting the file extension.
- Note
- Default=false
Definition at line 182 of file CObservation3DRangeScan.cpp.
References EXTERNALS_AS_TEXT_value.
◆ EXTERNALS_AS_TEXT() [2/2]
|
static |
Definition at line 186 of file CObservation3DRangeScan.cpp.
References EXTERNALS_AS_TEXT_value.
◆ get_unproj_lut()
| const CObservation3DRangeScan::unproject_LUT_t & CObservation3DRangeScan::get_unproj_lut | ( | ) | const |
Gets (or generates upon first request) the 3D point cloud projection look-up-table for the current depth camera intrinsics & distortion parameters.
Returns a const reference to a global variable. Multithread safe.
- See also
- unprojectInto
Definition at line 80 of file CObservation3DRangeScan.cpp.
References ASSERT_EQUAL_, LUT_info::calib, mrpt::obs::CObservation3DRangeScan::unproject_LUT_t::Kxs, LUTs, LUTs_mtx, LUT_info::range_is_depth, LUT_info::sensorPose, and THROW_EXCEPTION.
Referenced by mrpt::obs::detail::range2XYZ_LUT().
◆ getClassName()
|
inlinestatic |
Definition at line 170 of file CObservation3DRangeScan.h.
◆ getDescriptionAsText()
|
overridevirtual |
Build a detailed, multi-line textual description of the observation contents and dump it to the output stream.
- Note
- If overried by derived classes, call base CObservation::getDescriptionAsText() first to show common information.
- This is the text that appears in RawLogViewer when selecting an object in the dataset
Reimplemented from mrpt::obs::CObservation.
Definition at line 1362 of file CObservation3DRangeScan.cpp.
References mrpt::config::CConfigFileMemory::getContent(), and mrpt::math::CMatrixFixed< T, ROWS, COLS >::size().
◆ getDescriptionAsTextValue()
|
inherited |
Return by value version of getDescriptionAsText(std::ostream&)
Definition at line 59 of file CObservation.cpp.
◆ getOriginalReceivedTimeStamp()
|
inlinevirtualinherited |
By default, returns CObservation::timestamp but in sensors capable of satellite (or otherwise) accurate UTC timing of readings, this contains the computer-based timestamp of reception, which may be slightly different than timestamp.
- See also
- getTimeStamp()
Reimplemented in mrpt::obs::CObservationVelodyneScan, mrpt::obs::CObservationGPS, and mrpt::obs::CObservationRotatingScan.
Definition at line 71 of file CObservation.h.
References mrpt::obs::CObservation::timestamp.
◆ GetRuntimeClass()
|
overridevirtual |
Returns information about the class of an object in runtime.
Reimplemented from mrpt::obs::CObservation.
◆ GetRuntimeClassIdStatic()
|
static |
◆ getScanSize()
| size_t CObservation3DRangeScan::getScanSize | ( | ) | const |
Get the size of the scan pointcloud.
- Note
- Method is added for compatibility with its CObservation2DRangeScan counterpart
Definition at line 1140 of file CObservation3DRangeScan.cpp.
◆ getSensorPose() [1/2]
|
inherited |
A general method to retrieve the sensor pose on the robot.
Note that most sensors will return a full (6D) CPose3D, but see the derived classes for more details or special cases.
- See also
- setSensorPose
Definition at line 24 of file CObservation.cpp.
References mrpt::poses::CPose3D::asTPose().
◆ getSensorPose() [2/2]
|
inlineoverridevirtual |
A general method to retrieve the sensor pose on the robot.
Note that most sensors will return a full (6D) CPose3D, but see the derived classes for more details or special cases.
- See also
- setSensorPose
Implements mrpt::obs::CObservation.
Definition at line 552 of file CObservation3DRangeScan.h.
References sensorPose.
◆ getTimeStamp()
|
inlineinherited |
Returns CObservation::timestamp for all kind of observations.
- See also
- getOriginalReceivedTimeStamp()
Definition at line 66 of file CObservation.h.
References mrpt::obs::CObservation::timestamp.
◆ getZoneAsObs()
| void CObservation3DRangeScan::getZoneAsObs | ( | CObservation3DRangeScan & | obs, |
| const unsigned int & | r1, | ||
| const unsigned int & | r2, | ||
| const unsigned int & | c1, | ||
| const unsigned int & | c2 | ||
| ) |
Extract a ROI of the 3D observation as a new one.
- Note
- PixelLabels are not copied to the output subimage.
Definition at line 1023 of file CObservation3DRangeScan.cpp.
References mrpt::math::CMatrixDynamic< T >::asEigen(), ASSERT_, cameraParams, confidenceImage, hasConfidenceImage, hasIntensityImage, hasPoints3D, hasRangeImage, intensityImage, intensityImageChannel, maxRange, points3D_x, points3D_y, points3D_z, rangeImage, sensorPose, and stdError.
◆ hasPixelLabels()
|
inline |
Returns true if the field CObservation3DRangeScan::pixelLabels contains a non-NULL smart pointer.
To enhance a 3D point cloud with labeling info, just assign an appropiate object to pixelLabels
Definition at line 507 of file CObservation3DRangeScan.h.
References pixelLabels.
◆ insertObservationInto()
|
inlineinherited |
This method is equivalent to:
- Parameters
-
theMap The map where this observation is to be inserted: the map will be updated. robotPose The pose of the robot base for this observation, relative to the target metric map. Set to nullptr (default) to use (0,0,0deg)
- Returns
- Returns true if the map has been updated, or false if this observations has nothing to do with a metric map (for example, a sound observation).
See: Maps and observations compatibility matrix
- See also
- CMetricMap, CMetricMap::insertObservation
Definition at line 99 of file CObservation.h.
◆ load()
|
overridevirtual |
Makes sure all images and other fields which may be externally stored are loaded in memory.
Note that for all CImages, calling load() is not required since the images will be automatically loaded upon first access, so load() shouldn't be needed to be called in normal cases by the user. If all the data were alredy loaded or this object has no externally stored data fields, calling this method has no effects.
- See also
- unload
Reimplemented from mrpt::obs::CObservation.
Definition at line 623 of file CObservation3DRangeScan.cpp.
References mrpt::serialization::archiveFrom(), ASSERT_EQUAL_, mrpt::math::CMatrixDynamic< T >::begin(), mrpt::math::CMatrixDynamic< T >::cols(), mrpt::math::CMatrixDynamic< T >::data(), mrpt::system::extractFileExtension(), mrpt::math::MatrixVectorBase< Scalar, Derived >::loadFromTextFile(), mrpt::system::os::memcpy(), mrpt::math::CMatrixDynamic< T >::rows(), mrpt::math::CMatrixDynamic< T >::size(), and mrpt::system::strCmpI().
Referenced by mrpt::maps::CColouredOctoMap::internal_insertObservation(), and mrpt::graphslam::deciders::CICPCriteriaERD< GRAPH_T >::updateState().
◆ points3D_convertToExternalStorage()
| void CObservation3DRangeScan::points3D_convertToExternalStorage | ( | const std::string & | fileName, |
| const std::string & | use_this_base_dir | ||
| ) |
Users won't normally want to call this, it's only used from internal MRPT programs.
- See also
- EXTERNALS_AS_TEXT
Definition at line 764 of file CObservation3DRangeScan.cpp.
References mrpt::serialization::archiveFrom(), ASSERT_, EXTERNALS_AS_TEXT_value, mrpt::system::fileNameChangeExtension(), mrpt::math::MATRIX_FORMAT_FIXED, mrpt::math::MatrixVectorBase< Scalar, Derived >::saveToTextFile(), mrpt::math::CMatrixDynamic< T >::setRow(), and mrpt::vector_strong_clear().
◆ points3D_getExternalStorageFile()
|
inline |
Definition at line 350 of file CObservation3DRangeScan.h.
References m_points3D_external_file.
◆ points3D_getExternalStorageFileAbsolutePath() [1/2]
| void CObservation3DRangeScan::points3D_getExternalStorageFileAbsolutePath | ( | std::string & | out_path | ) | const |
Definition at line 743 of file CObservation3DRangeScan.cpp.
References ASSERT_.
◆ points3D_getExternalStorageFileAbsolutePath() [2/2]
|
inline |
Definition at line 356 of file CObservation3DRangeScan.h.
◆ points3D_isExternallyStored()
|
inline |
Definition at line 346 of file CObservation3DRangeScan.h.
References m_points3D_external_stored.
◆ points3D_overrideExternalStoredFlag()
|
inline |
Users normally won't need to use this.
Definition at line 367 of file CObservation3DRangeScan.h.
References m_points3D_external_stored.
◆ rangeImage_convertToExternalStorage()
| void CObservation3DRangeScan::rangeImage_convertToExternalStorage | ( | const std::string & | fileName, |
| const std::string & | use_this_base_dir | ||
| ) |
Users won't normally want to call this, it's only used from internal MRPT programs.
- See also
- EXTERNALS_AS_TEXT
Definition at line 814 of file CObservation3DRangeScan.cpp.
References mrpt::serialization::archiveFrom(), ASSERT_, mrpt::math::CMatrixDynamic< T >::begin(), mrpt::math::CMatrixDynamic< T >::cols(), mrpt::math::CMatrixDynamic< T >::data(), EXTERNALS_AS_TEXT_value, mrpt::system::fileNameChangeExtension(), mrpt::math::MATRIX_FORMAT_FIXED, mrpt::math::CMatrixDynamic< T >::rows(), mrpt::math::MatrixVectorBase< Scalar, Derived >::saveToTextFile(), and mrpt::math::CMatrixDynamic< T >::size().
◆ rangeImage_forceResetExternalStorage()
|
inline |
Forces marking this observation as non-externally stored - it doesn't anything else apart from reseting the corresponding flag (Users won't normally want to call this, it's only used from internal MRPT programs)
Definition at line 462 of file CObservation3DRangeScan.h.
References m_rangeImage_external_stored.
◆ rangeImage_getAsImage()
| mrpt::img::CImage CObservation3DRangeScan::rangeImage_getAsImage | ( | const std::optional< mrpt::img::TColormap > | color = std::nullopt, |
| const std::optional< float > | normMinRange = std::nullopt, |
||
| const std::optional< float > | normMaxRange = std::nullopt, |
||
| const std::optional< std::string > | additionalLayerName = std::nullopt |
||
| ) | const |
Builds a visualization from the rangeImage.
The image is built with the given color map (default: grayscale) and such that the colormap range is mapped to ranges 0 meters to the field "maxRange" in this object, unless overriden with the optional parameters. Note that the usage of optional<> allows any parameter to be left to its default placing std::nullopt.
- Parameters
-
additionalLayerName If empty string or not provided, the main rangeImage will be used; otherwise, the given range image layer.
- See also
- rangeImageAsImage
Definition at line 1615 of file CObservation3DRangeScan.cpp.
References ASSERT_, ASSERT_ABOVE_, hasRangeImage, maxRange, rangeImage, rangeImageAsImage(), rangeImageOtherLayers, and rangeUnits.
Referenced by mrpt::hwdrivers::CKinect::getNextObservation().
◆ rangeImage_getExternalStorageFile()
| std::string CObservation3DRangeScan::rangeImage_getExternalStorageFile | ( | const std::string & | rangeImageLayer | ) | const |
Definition at line 710 of file CObservation3DRangeScan.cpp.
References mrpt::system::extractFileExtension(), and mrpt::system::fileNameChangeExtension().
◆ rangeImage_getExternalStorageFileAbsolutePath() [1/2]
| void CObservation3DRangeScan::rangeImage_getExternalStorageFileAbsolutePath | ( | std::string & | out_path, |
| const std::string & | rangeImageLayer | ||
| ) | const |
rangeImageLayer: Empty for the main rangeImage matrix, otherwise, a key of rangeImageOtherLayers
Definition at line 723 of file CObservation3DRangeScan.cpp.
References ASSERT_.
Referenced by rangeImage_getExternalStorageFileAbsolutePath().
◆ rangeImage_getExternalStorageFileAbsolutePath() [2/2]
|
inline |
Definition at line 447 of file CObservation3DRangeScan.h.
References rangeImage_getExternalStorageFileAbsolutePath().
◆ rangeImage_isExternallyStored()
|
inline |
Definition at line 436 of file CObservation3DRangeScan.h.
References m_rangeImage_external_stored.
◆ rangeImage_setSize()
| void CObservation3DRangeScan::rangeImage_setSize | ( | const int | HEIGHT, |
| const int | WIDTH | ||
| ) |
Similar to calling "rangeImage.setSize(H,W)" but this method provides memory pooling to speed-up the memory allocation.
Definition at line 1148 of file CObservation3DRangeScan.cpp.
References mrpt::system::CGenericMemoryPool< DATA_PARAMS, POOLABLE_DATA >::getInstance(), CObservation3DRangeScan_Ranges_MemPoolParams::H, CObservation3DRangeScan_Ranges_MemPoolData::rangeImage, mrpt::system::CGenericMemoryPool< DATA_PARAMS, POOLABLE_DATA >::request_memory(), and CObservation3DRangeScan_Ranges_MemPoolParams::W.
Referenced by fillSampleObs().
◆ rangeImageAsImage()
|
static |
Static method to convert a range matrix into an image.
If val_max is left to zero, the maximum range in the matrix will be automatically used.
- See also
- rangeImage_getAsImage
Definition at line 1561 of file CObservation3DRangeScan.cpp.
References ASSERT_ABOVE_, mrpt::img::CH_GRAY, mrpt::img::CH_RGB, mrpt::img::cmGRAYSCALE, mrpt::math::MatrixVectorBase< Scalar, Derived >::coeff(), mrpt::img::colormap(), mrpt::math::CMatrixDynamic< T >::cols(), G, mrpt::math::MatrixVectorBase< Scalar, Derived >::maxCoeff(), R, rangeUnits, mrpt::math::CMatrixDynamic< T >::rows(), and THROW_EXCEPTION.
Referenced by rangeImage_getAsImage().
◆ recoverCameraCalibrationParameters()
|
static |
A Levenberg-Marquart-based optimizer to recover the calibration parameters of a 3D camera given a range (depth) image and the corresponding 3D point cloud.
- Parameters
-
camera_offset The offset (in meters) in the +X direction of the point cloud. It's 1cm for SwissRanger SR4000.
- Returns
- The final average reprojection error per pixel (typ <0.05 px)
Definition at line 967 of file CObservation3DRangeScan.cpp.
References ASSERT_, CALIB_DECIMAT, mrpt::obs::detail::cam2vec(), mrpt::math::CMatrixDynamic< T >::cols(), mrpt::obs::detail::cost_func(), mrpt::math::MatrixVectorBase< Scalar, Derived >::fill(), mrpt::img::TCamera::focalLengthMeters, hasPoints3D, hasRangeImage, mrpt::img::TCamera::intrinsicParams, mrpt::system::LVL_INFO, MRPT_END, MRPT_START, mrpt::img::TCamera::ncols, mrpt::img::TCamera::nrows, points3D_x, points3D_y, points3D_z, rangeImage, mrpt::math::CVectorDynamic< T >::resize(), mrpt::math::CMatrixDynamic< T >::rows(), mrpt::math::CVectorDynamic< T >::size(), mrpt::square(), and mrpt::obs::detail::vec2cam().
◆ resizePoints3DVectors()
| void CObservation3DRangeScan::resizePoints3DVectors | ( | const size_t | WH | ) |
Use this method instead of resizing all three points3D_x, points3D_y & points3D_z to allow the usage of the internal memory pool.
Definition at line 1085 of file CObservation3DRangeScan.cpp.
References mrpt::system::CGenericMemoryPool< DATA_PARAMS, POOLABLE_DATA >::getInstance(), CObservation3DRangeScan_Points_MemPoolData::idxs_x, CObservation3DRangeScan_Points_MemPoolData::idxs_y, CObservation3DRangeScan_Points_MemPoolData::pts_x, CObservation3DRangeScan_Points_MemPoolData::pts_y, CObservation3DRangeScan_Points_MemPoolData::pts_z, mrpt::system::CGenericMemoryPool< DATA_PARAMS, POOLABLE_DATA >::request_memory(), mrpt::vector_strong_clear(), and CObservation3DRangeScan_Points_MemPoolParams::WH.
Referenced by mrpt::opengl::PointCloudAdapter< mrpt::obs::CObservation3DRangeScan >::resize(), and mrpt::obs::detail::unprojectInto().
◆ serializeFrom() [1/2]
|
inlineprotectedvirtualinherited |
Virtual method for reading (deserializing) from an abstract schema based archive.
Definition at line 74 of file CSerializable.h.
References mrpt::serialization::CSerializable::GetRuntimeClass(), and THROW_EXCEPTION.
◆ serializeFrom() [2/2]
|
overrideprotectedvirtual |
Pure virtual method for reading (deserializing) from an abstract archive.
Users don't call this method directly. Instead, use stream >> object;.
- Parameters
-
in The input binary stream where the object data must read from. version The version of the object stored in the stream: use this version number in your code to know how to read the incoming data.
- Exceptions
-
std::exception On any I/O error
Implements mrpt::serialization::CSerializable.
Definition at line 376 of file CObservation3DRangeScan.cpp.
References ASSERT_, MRPT_THROW_UNKNOWN_SERIALIZATION_VERSION, mrpt::serialization::CArchive::ReadAs(), mrpt::serialization::CArchive::ReadBuffer(), mrpt::serialization::CArchive::ReadBufferFixEndianness(), mrpt::round(), and mrpt::math::CMatrixDynamic< T >::rows().
◆ serializeGetVersion()
|
overrideprotectedvirtual |
Must return the current versioning number of the object.
Start in zero for new classes, and increments each time there is a change in the stored format.
Implements mrpt::serialization::CSerializable.
Definition at line 298 of file CObservation3DRangeScan.cpp.
◆ serializeTo() [1/2]
|
inlineprotectedvirtualinherited |
Virtual method for writing (serializing) to an abstract schema based archive.
Definition at line 64 of file CSerializable.h.
References mrpt::serialization::CSerializable::GetRuntimeClass(), and THROW_EXCEPTION.
◆ serializeTo() [2/2]
|
overrideprotectedvirtual |
Pure virtual method for writing (serializing) to an abstract archive.
Users don't call this method directly. Instead, use stream << object;.
- Exceptions
-
std::exception On any I/O error
Implements mrpt::serialization::CSerializable.
Definition at line 299 of file CObservation3DRangeScan.cpp.
◆ setSensorPose() [1/2]
|
inherited |
A general method to change the sensor pose on the robot.
Note that most sensors will use the full (6D) CPose3D, but see the derived classes for more details or special cases.
- See also
- getSensorPose
Definition at line 31 of file CObservation.cpp.
◆ setSensorPose() [2/2]
|
inlineoverridevirtual |
A general method to change the sensor pose on the robot.
Note that most sensors will use the full (6D) CPose3D, but see the derived classes for more details or special cases.
- See also
- getSensorPose
Implements mrpt::obs::CObservation.
Definition at line 557 of file CObservation3DRangeScan.h.
References sensorPose.
◆ swap() [1/2]
|
protectedinherited |
Swap with another observation, ONLY the data defined here in the base class CObservation.
It's protected since it'll be only called from child classes that should know what else to swap appart from these common data.
Definition at line 36 of file CObservation.cpp.
References mrpt::obs::CObservation::sensorLabel, and mrpt::obs::CObservation::timestamp.
Referenced by mrpt::obs::CObservationStereoImages::swap().
◆ swap() [2/2]
| void CObservation3DRangeScan::swap | ( | CObservation3DRangeScan & | o | ) |
Very efficient method to swap the contents of two observations.
Definition at line 584 of file CObservation3DRangeScan.cpp.
References cameraParams, cameraParamsIntensity, confidenceImage, hasConfidenceImage, hasIntensityImage, hasPoints3D, hasRangeImage, intensityImage, intensityImageChannel, m_points3D_external_file, m_points3D_external_stored, m_rangeImage_external_file, m_rangeImage_external_stored, maxRange, pixelLabels, points3D_idxs_x, points3D_idxs_y, points3D_x, points3D_y, points3D_z, rangeImage, rangeImageOtherLayers, relativePoseIntensityWRTDepth, sensorPose, and stdError.
Referenced by mrpt::hwdrivers::CKinect::getNextObservation().
◆ undistort()
| void CObservation3DRangeScan::undistort | ( | ) |
Removes the distortion in both, depth and intensity images.
Intrinsics (fx,fy,cx,cy) remains the same for each image after undistortion.
Definition at line 1490 of file CObservation3DRangeScan.cpp.
References cameraParams, cameraParamsIntensity, mrpt::math::CMatrixDynamic< T >::cols(), mrpt::math::CMatrixDynamic< T >::data(), mrpt::img::TCamera::dist, hasIntensityImage, intensityImage, mrpt::img::TCamera::intrinsicParams, rangeImage, rangeImageOtherLayers, mrpt::math::CMatrixDynamic< T >::rows(), THROW_EXCEPTION, and mrpt::img::CImage::undistort().
◆ unload()
|
overridevirtual |
Unload all images, for the case they being delayed-load images stored in external files (othewise, has no effect).
- See also
- load
Reimplemented from mrpt::obs::CObservation.
Definition at line 695 of file CObservation3DRangeScan.cpp.
References mrpt::vector_strong_clear().
◆ unprojectInto()
|
inline |
Unprojects the RGB+D image pair into a 3D point cloud (with color if the target map supports it) and optionally at a given 3D pose.
The 3D point coordinates are computed from the depth image (rangeImage) and the depth camera camera parameters (cameraParams). There exist two set of formulas for projecting the i'th point, depending on the value of "range_is_depth". In all formulas below, "rangeImage" is the matrix of ranges and the pixel coordinates are (r,c).
1) [range_is_depth=true] With "range equals depth" or "Kinect-like depth mode": the range values are in fact distances along the "+X" axis, not real 3D ranges (this is the way Kinect reports ranges):
2) [range_is_depth=false] With "normal ranges": range means distance in 3D. This must be set when processing data from the SwissRange 3D camera, among others.
The color of each point is determined by projecting the 3D local point into the RGB image using cameraParamsIntensity.
By default the local (sensor-centric) coordinates of points are directly stored into the local map, but if indicated so in takeIntoAccountSensorPoseOnRobot the points are transformed with sensorPose. Furthermore, if provided, those coordinates are transformed with robotPoseInTheWorld
- Note
- For multi-return sensors, only the layer specified in T3DPointsProjectionParams::layer will be unprojected.
- Template Parameters
-
POINTMAP Supported maps are all those covered by mrpt::opengl::PointCloudAdapter (mrpt::maps::CPointsMap and derived, mrpt::opengl::CPointCloudColoured, PCL point clouds,...)
Definition at line 257 of file CObservation3DRangeScan.h.
Referenced by mrpt::hwdrivers::CKinect::getNextObservation(), and TEST().
◆ writeToMatlab()
|
inlinevirtualinherited |
Introduces a pure virtual method responsible for writing to a mxArray Matlab object, typically a MATLAB struct whose contents are documented in each derived class.
- Returns
- A new
mxArray(caller is responsible of memory freeing) or nullptr is class does not support conversion to MATLAB.
Definition at line 90 of file CSerializable.h.
Member Data Documentation
◆ cameraParams
| mrpt::img::TCamera mrpt::obs::CObservation3DRangeScan::cameraParams |
Projection parameters of the depth camera.
Definition at line 521 of file CObservation3DRangeScan.h.
Referenced by fillSampleObs(), mrpt::hwdrivers::CSwissRanger3DCamera::getNextObservation(), mrpt::hwdrivers::CKinect::getNextObservation(), getZoneAsObs(), swap(), and undistort().
◆ cameraParamsIntensity
| mrpt::img::TCamera mrpt::obs::CObservation3DRangeScan::cameraParamsIntensity |
Projection parameters of the intensity (graylevel or RGB) camera.
Definition at line 523 of file CObservation3DRangeScan.h.
Referenced by mrpt::hwdrivers::CKinect::getNextObservation(), mrpt::maps::detail::pointmap_traits< CColouredPointsMap >::internal_loadFromRangeScan3D_init(), swap(), and undistort().
◆ className
|
static |
Definition at line 170 of file CObservation3DRangeScan.h.
◆ confidenceImage
| mrpt::img::CImage mrpt::obs::CObservation3DRangeScan::confidenceImage |
If hasConfidenceImage=true, an image with the "confidence" value [range 0-255] as estimated by the capture drivers.
Definition at line 497 of file CObservation3DRangeScan.h.
Referenced by mrpt::detectors::CFaceDetection::checkIfDiagonalSurface(), mrpt::detectors::CFaceDetection::checkIfDiagonalSurface2(), mrpt::detectors::CFaceDetection::checkIfFacePlaneCov(), mrpt::detectors::CFaceDetection::checkIfFaceRegions(), mrpt::detectors::CFaceDetection::experimental_segmentFace(), mrpt::hwdrivers::CSwissRanger3DCamera::getNextObservation(), getZoneAsObs(), and swap().
◆ hasConfidenceImage
| bool mrpt::obs::CObservation3DRangeScan::hasConfidenceImage {false} |
true means the field confidenceImage contains valid data
Definition at line 494 of file CObservation3DRangeScan.h.
Referenced by mrpt::detectors::CFaceDetection::checkIfFacePlaneCov(), mrpt::hwdrivers::CSwissRanger3DCamera::getNextObservation(), getZoneAsObs(), and swap().
◆ hasIntensityImage
| bool mrpt::obs::CObservation3DRangeScan::hasIntensityImage {false} |
true means the field intensityImage contains valid data
Definition at line 480 of file CObservation3DRangeScan.h.
Referenced by mrpt::hwdrivers::CSwissRanger3DCamera::getNextObservation(), mrpt::hwdrivers::CKinect::getNextObservation(), getZoneAsObs(), mrpt::maps::detail::pointmap_traits< CColouredPointsMap >::internal_loadFromRangeScan3D_init(), swap(), undistort(), and mrpt::obs::detail::unprojectInto().
◆ hasPoints3D
| bool mrpt::obs::CObservation3DRangeScan::hasPoints3D {false} |
true means the field points3D contains valid data.
Definition at line 326 of file CObservation3DRangeScan.h.
Referenced by mrpt::hwdrivers::CSwissRanger3DCamera::getNextObservation(), getZoneAsObs(), recoverCameraCalibrationParameters(), mrpt::opengl::PointCloudAdapter< mrpt::obs::CObservation3DRangeScan >::resize(), swap(), and mrpt::maps::detail::loadFromRangeImpl< Derived >::templ_loadFromRangeScan().
◆ hasRangeImage
| bool mrpt::obs::CObservation3DRangeScan::hasRangeImage {false} |
true means the field rangeImage contains valid data
Definition at line 376 of file CObservation3DRangeScan.h.
Referenced by fillSampleObs(), mrpt::graphslam::deciders::CRangeScanOps< GRAPH_T >::getICPEdge(), mrpt::hwdrivers::CSwissRanger3DCamera::getNextObservation(), mrpt::hwdrivers::CKinect::getNextObservation(), getZoneAsObs(), rangeImage_getAsImage(), recoverCameraCalibrationParameters(), swap(), and mrpt::obs::detail::unprojectInto().
◆ intensityImage
| mrpt::img::CImage mrpt::obs::CObservation3DRangeScan::intensityImage |
If hasIntensityImage=true, a color or gray-level intensity image of the same size than "rangeImage".
Definition at line 484 of file CObservation3DRangeScan.h.
Referenced by mrpt::detectors::CFaceDetection::checkIfDiagonalSurface(), mrpt::detectors::CFaceDetection::checkIfDiagonalSurface2(), mrpt::detectors::CFaceDetection::checkIfFacePlaneCov(), mrpt::detectors::CFaceDetection::checkIfFaceRegions(), mrpt::detectors::CFaceDetection::experimental_segmentFace(), mrpt::hwdrivers::CSwissRanger3DCamera::getNextObservation(), mrpt::hwdrivers::CKinect::getNextObservation(), getZoneAsObs(), mrpt::maps::detail::pointmap_traits< CColouredPointsMap >::internal_loadFromRangeScan3D_init(), mrpt::maps::detail::pointmap_traits< CColouredPointsMap >::internal_loadFromRangeScan3D_prepareOneRange(), swap(), and undistort().
◆ intensityImageChannel
| TIntensityChannelID mrpt::obs::CObservation3DRangeScan::intensityImageChannel {CH_VISIBLE} |
The source of the intensityImage; typically the visible channel.
- See also
- TIntensityChannelID
Definition at line 488 of file CObservation3DRangeScan.h.
Referenced by getZoneAsObs(), and swap().
◆ m_points3D_external_file
|
protected |
3D points are in CImage::getImagesPathBase()+<this_file_name>
Definition at line 176 of file CObservation3DRangeScan.h.
Referenced by points3D_getExternalStorageFile(), and swap().
◆ m_points3D_external_stored
|
protected |
If set to true, m_points3D_external_file is valid.
Definition at line 174 of file CObservation3DRangeScan.h.
Referenced by points3D_isExternallyStored(), points3D_overrideExternalStoredFlag(), and swap().
◆ m_rangeImage_external_file
|
protected |
rangeImage is in CImage::getImagesPathBase()+<this_file_name>
Definition at line 181 of file CObservation3DRangeScan.h.
Referenced by swap().
◆ m_rangeImage_external_stored
|
protected |
If set to true, m_rangeImage_external_file is valid.
Definition at line 179 of file CObservation3DRangeScan.h.
Referenced by rangeImage_forceResetExternalStorage(), rangeImage_isExternallyStored(), and swap().
◆ maxRange
| float mrpt::obs::CObservation3DRangeScan::maxRange {5.0f} |
The maximum range allowed by the device, in meters (e.g.
8.0m, 5.0m,...)
Definition at line 544 of file CObservation3DRangeScan.h.
Referenced by mrpt::hwdrivers::CSwissRanger3DCamera::getNextObservation(), getZoneAsObs(), mrpt::maps::COccupancyGridMap3D::internal_insertObservationScan3D(), rangeImage_getAsImage(), and swap().
◆ pixelLabels
| TPixelLabelInfoBase::Ptr mrpt::obs::CObservation3DRangeScan::pixelLabels |
All information about pixel labeling is stored in this (smart pointer to) structure; refer to TPixelLabelInfo for details on the contents User is responsible of creating a new object of the desired data type.
It will be automatically (de)serialized no matter its specific type.
Definition at line 513 of file CObservation3DRangeScan.h.
Referenced by hasPixelLabels(), and swap().
◆ points3D_idxs_x
| std::vector<uint16_t> mrpt::obs::CObservation3DRangeScan::points3D_idxs_x |
If hasPoints3D=true, the (x,y) pixel coordinates for each (X,Y,Z) point in points3D_x, points3D_y, points3D_z.
Definition at line 332 of file CObservation3DRangeScan.h.
Referenced by mempool_donate_xyz_buffers(), mrpt::obs::detail::range2XYZ_LUT(), and swap().
◆ points3D_idxs_y
| std::vector<uint16_t> mrpt::obs::CObservation3DRangeScan::points3D_idxs_y |
Definition at line 332 of file CObservation3DRangeScan.h.
Referenced by mempool_donate_xyz_buffers(), mrpt::obs::detail::range2XYZ_LUT(), and swap().
◆ points3D_x
| std::vector<float> mrpt::obs::CObservation3DRangeScan::points3D_x |
If hasPoints3D=true, the (X,Y,Z) coordinates of the 3D point cloud detected by the camera.
- See also
- resizePoints3DVectors
Definition at line 329 of file CObservation3DRangeScan.h.
Referenced by mrpt::detectors::CFaceDetection::checkIfDiagonalSurface(), mrpt::detectors::CFaceDetection::checkIfDiagonalSurface2(), mrpt::detectors::CFaceDetection::checkIfFacePlane(), mrpt::detectors::CFaceDetection::checkIfFacePlaneCov(), mrpt::detectors::CFaceDetection::checkIfFaceRegions(), mrpt::obs::detail::cost_func(), mrpt::detectors::CFaceDetection::experimental_viewFacePointsScanned(), mrpt::hwdrivers::CSwissRanger3DCamera::getNextObservation(), mrpt::opengl::PointCloudAdapter< mrpt::obs::CObservation3DRangeScan >::getPointXYZ(), getZoneAsObs(), mrpt::maps::detail::pointmap_traits< CColouredPointsMap >::internal_loadFromRangeScan3D_init(), mempool_donate_xyz_buffers(), recoverCameraCalibrationParameters(), mrpt::opengl::PointCloudAdapter< mrpt::obs::CObservation3DRangeScan >::setInvalidPoint(), mrpt::opengl::PointCloudAdapter< mrpt::obs::CObservation3DRangeScan >::setPointXYZ(), mrpt::opengl::PointCloudAdapter< mrpt::obs::CObservation3DRangeScan >::size(), swap(), mrpt::maps::detail::loadFromRangeImpl< Derived >::templ_loadFromRangeScan(), and TEST().
◆ points3D_y
| std::vector<float> mrpt::obs::CObservation3DRangeScan::points3D_y |
Definition at line 329 of file CObservation3DRangeScan.h.
Referenced by mrpt::detectors::CFaceDetection::checkIfDiagonalSurface(), mrpt::detectors::CFaceDetection::checkIfDiagonalSurface2(), mrpt::detectors::CFaceDetection::checkIfFacePlane(), mrpt::detectors::CFaceDetection::checkIfFacePlaneCov(), mrpt::detectors::CFaceDetection::checkIfFaceRegions(), mrpt::obs::detail::cost_func(), mrpt::detectors::CFaceDetection::experimental_viewFacePointsScanned(), mrpt::hwdrivers::CSwissRanger3DCamera::getNextObservation(), mrpt::opengl::PointCloudAdapter< mrpt::obs::CObservation3DRangeScan >::getPointXYZ(), getZoneAsObs(), mempool_donate_xyz_buffers(), recoverCameraCalibrationParameters(), mrpt::opengl::PointCloudAdapter< mrpt::obs::CObservation3DRangeScan >::setInvalidPoint(), mrpt::opengl::PointCloudAdapter< mrpt::obs::CObservation3DRangeScan >::setPointXYZ(), swap(), and mrpt::maps::detail::loadFromRangeImpl< Derived >::templ_loadFromRangeScan().
◆ points3D_z
| std::vector<float> mrpt::obs::CObservation3DRangeScan::points3D_z |
Definition at line 329 of file CObservation3DRangeScan.h.
Referenced by mrpt::detectors::CFaceDetection::checkIfDiagonalSurface(), mrpt::detectors::CFaceDetection::checkIfDiagonalSurface2(), mrpt::detectors::CFaceDetection::checkIfFacePlane(), mrpt::detectors::CFaceDetection::checkIfFacePlaneCov(), mrpt::detectors::CFaceDetection::checkIfFaceRegions(), mrpt::obs::detail::cost_func(), mrpt::detectors::CFaceDetection::experimental_viewFacePointsScanned(), mrpt::hwdrivers::CSwissRanger3DCamera::getNextObservation(), mrpt::opengl::PointCloudAdapter< mrpt::obs::CObservation3DRangeScan >::getPointXYZ(), getZoneAsObs(), mempool_donate_xyz_buffers(), recoverCameraCalibrationParameters(), mrpt::opengl::PointCloudAdapter< mrpt::obs::CObservation3DRangeScan >::setInvalidPoint(), mrpt::opengl::PointCloudAdapter< mrpt::obs::CObservation3DRangeScan >::setPointXYZ(), swap(), and mrpt::maps::detail::loadFromRangeImpl< Derived >::templ_loadFromRangeScan().
◆ range_is_depth
| bool mrpt::obs::CObservation3DRangeScan::range_is_depth {true} |
true: Kinect-like ranges: entries of rangeImage are distances along the +X axis; false: Ranges in rangeImage are actual distances in 3D.
Definition at line 399 of file CObservation3DRangeScan.h.
Referenced by mrpt::hwdrivers::CSwissRanger3DCamera::getNextObservation(), and TEST().
◆ rangeImage
| mrpt::math::CMatrix_u16 mrpt::obs::CObservation3DRangeScan::rangeImage |
If hasRangeImage=true, a matrix of floats with the range data as captured by the camera (in meters).
For sensors with multiple returns per pixels, this matrix holds the CLOSEST of all the returns.
- See also
- range_is_depth, rangeUnits, rangeImageOtherLayers
Definition at line 384 of file CObservation3DRangeScan.h.
Referenced by mrpt::obs::detail::cost_func(), fillSampleObs(), mrpt::hwdrivers::CSwissRanger3DCamera::getNextObservation(), mrpt::hwdrivers::CKinect::getNextObservation(), getZoneAsObs(), mempool_donate_range_matrix(), mrpt::obs::detail::range2XYZ_LUT(), rangeImage_getAsImage(), recoverCameraCalibrationParameters(), swap(), TEST(), undistort(), and mrpt::obs::detail::unprojectInto().
◆ rangeImageOtherLayers
| std::map<std::string, mrpt::math::CMatrix_u16> mrpt::obs::CObservation3DRangeScan::rangeImageOtherLayers |
Additional layer range/depth images.
Text labels are arbitrary and sensor-dependent, e.g. "LAST", "SECOND", "3rd", etc.
Definition at line 388 of file CObservation3DRangeScan.h.
Referenced by fillSampleObs(), mrpt::obs::detail::range2XYZ_LUT(), rangeImage_getAsImage(), swap(), undistort(), and mrpt::obs::detail::unprojectInto().
◆ rangeUnits
| float mrpt::obs::CObservation3DRangeScan::rangeUnits = 0.001f |
The conversion factor from integer units in rangeImage and actual distances in meters.
Default is 0.001 m, that is 1 millimeter.
- See also
- rangeImage
Definition at line 393 of file CObservation3DRangeScan.h.
Referenced by fillSampleObs(), mrpt::hwdrivers::CSwissRanger3DCamera::getNextObservation(), mrpt::obs::detail::range2XYZ_LUT(), rangeImage_getAsImage(), rangeImageAsImage(), and TEST().
◆ relativePoseIntensityWRTDepth
| mrpt::poses::CPose3D mrpt::obs::CObservation3DRangeScan::relativePoseIntensityWRTDepth |
Relative pose of the intensity camera wrt the depth camera (which is the coordinates origin for this observation).
In a SwissRanger camera, this will be (0,0,0,-90deg,0,-90deg) since both cameras coincide. In a Kinect, this will include a small lateral displacement and a rotation, according to the drawing on the top of this page.
Definition at line 533 of file CObservation3DRangeScan.h.
Referenced by mrpt::hwdrivers::CKinect::getNextObservation(), mrpt::maps::detail::pointmap_traits< CColouredPointsMap >::internal_loadFromRangeScan3D_init(), mrpt::maps::detail::pointmap_traits< CColouredPointsMap >::internal_loadFromRangeScan3D_prepareOneRange(), and swap().
◆ runtimeClassId
|
staticprotected |
Definition at line 170 of file CObservation3DRangeScan.h.
◆ sensorLabel
|
inherited |
An arbitrary label that can be used to identify the sensor.
Definition at line 62 of file CObservation.h.
Referenced by mrpt::ros1bridge::convert(), convertTo2DScan(), mrpt::hwdrivers::CSICKTim561Eth::decodeScan(), mrpt::hwdrivers::CLMS100Eth::decodeScan(), mrpt::hwdrivers::CRaePID::doProcess(), mrpt::hwdrivers::CRoboPeakLidar::doProcessSimple(), mrpt::hwdrivers::CSickLaserUSB::doProcessSimple(), mrpt::hwdrivers::CCANBusReader::doProcessSimple(), mrpt::hwdrivers::CSickLaserSerial::doProcessSimple(), mrpt::hwdrivers::CHokuyoURG::doProcessSimple(), mrpt::apps::RawlogGrabberApp::dump_GPS_mode_info(), mrpt::hwdrivers::CGPSInterface::flushParsedMessagesNow(), mrpt::obs::CObservationRotatingScan::fromScan2D(), mrpt::obs::CObservationRotatingScan::fromVelodyne(), mrpt::hwdrivers::CRaePID::getFullInfo(), mrpt::hwdrivers::CSwissRanger3DCamera::getNextObservation(), mrpt::hwdrivers::CKinect::getNextObservation(), mrpt::hwdrivers::CBoardSonars::getObservation(), mrpt::hwdrivers::CWirelessPower::getObservation(), mrpt::hwdrivers::CImpinjRFID::getObservation(), mrpt::hwdrivers::CEnoseModular::getObservation(), mrpt::hwdrivers::CBoardENoses::getObservation(), mrpt::hwdrivers::CNationalInstrumentsDAQ::grabbing_thread(), mrpt::obs::CObservation6DFeatures::serializeFrom(), mrpt::obs::CObservationPointCloud::serializeFrom(), mrpt::obs::CObservation6DFeatures::serializeTo(), mrpt::obs::CObservationPointCloud::serializeTo(), mrpt::obs::CObservation::swap(), and mrpt::ros1bridge::toROS().
◆ sensorPose
| mrpt::poses::CPose3D mrpt::obs::CObservation3DRangeScan::sensorPose |
The 6D pose of the sensor on the robot.
Definition at line 546 of file CObservation3DRangeScan.h.
Referenced by mrpt::hwdrivers::CSwissRanger3DCamera::getNextObservation(), mrpt::hwdrivers::CKinect::getNextObservation(), getSensorPose(), getZoneAsObs(), mrpt::maps::COccupancyGridMap3D::internal_insertObservationScan3D(), mrpt::obs::detail::range2XYZ_LUT(), setSensorPose(), swap(), mrpt::maps::detail::loadFromRangeImpl< Derived >::templ_loadFromRangeScan(), and TEST().
◆ stdError
| float mrpt::obs::CObservation3DRangeScan::stdError {0.01f} |
The "sigma" error of the device in meters, used while inserting the scan in an occupancy grid.
Definition at line 549 of file CObservation3DRangeScan.h.
Referenced by mrpt::hwdrivers::CSwissRanger3DCamera::getNextObservation(), getZoneAsObs(), and swap().
◆ timestamp
|
inherited |
The associated UTC time-stamp.
Where available, this should contain the accurate satellite-based timestamp of the sensor reading.
Definition at line 60 of file CObservation.h.
Referenced by mrpt::ros1bridge::convert(), convertTo2DScan(), mrpt::hwdrivers::CSICKTim561Eth::decodeScan(), mrpt::hwdrivers::CLMS100Eth::decodeScan(), mrpt::detectors::CObjectDetection::detectObjects(), mrpt::hwdrivers::CRaePID::doProcess(), mrpt::hwdrivers::CGPSInterface::doProcess(), mrpt::hwdrivers::CRoboPeakLidar::doProcessSimple(), mrpt::hwdrivers::CSickLaserUSB::doProcessSimple(), mrpt::hwdrivers::CCANBusReader::doProcessSimple(), mrpt::hwdrivers::CSickLaserSerial::doProcessSimple(), mrpt::hwdrivers::CHokuyoURG::doProcessSimple(), mrpt::hwdrivers::CGPSInterface::flushParsedMessagesNow(), mrpt::ros1bridge::fromROS(), mrpt::obs::CObservationRotatingScan::fromScan2D(), mrpt::obs::CObservationRotatingScan::fromVelodyne(), mrpt::hwdrivers::CRaePID::getFullInfo(), mrpt::hwdrivers::CSwissRanger3DCamera::getNextObservation(), mrpt::hwdrivers::COpenNI2_RGBD360::getNextObservation(), mrpt::hwdrivers::CKinect::getNextObservation(), mrpt::hwdrivers::CBoardSonars::getObservation(), mrpt::hwdrivers::CWirelessPower::getObservation(), mrpt::hwdrivers::CImageGrabber_OpenCV::getObservation(), mrpt::hwdrivers::CEnoseModular::getObservation(), mrpt::hwdrivers::CBoardENoses::getObservation(), mrpt::hwdrivers::CImageGrabber_dc1394::getObservation(), mrpt::hwdrivers::CImageGrabber_FlyCapture2::getObservation(), mrpt::hwdrivers::CDUO3DCamera::getObservations(), mrpt::obs::CObservation::getOriginalReceivedTimeStamp(), mrpt::obs::CObservation::getTimeStamp(), mrpt::hwdrivers::CNationalInstrumentsDAQ::grabbing_thread(), mrpt::maps::CLandmarksMap::loadOccupancyFeaturesFrom2DRangeScan(), mrpt::maps::CLandmarksMap::loadSiftFeaturesFromImageObservation(), mrpt::maps::CLandmarksMap::loadSiftFeaturesFromStereoImageObservation(), mrpt::hwdrivers::CGPSInterface::parse_NMEA(), mrpt::apps::KFSLAMApp::Run_KF_SLAM(), mrpt::obs::CObservation6DFeatures::serializeFrom(), mrpt::obs::CObservationPointCloud::serializeFrom(), mrpt::obs::CObservation6DFeatures::serializeTo(), mrpt::obs::CObservationPointCloud::serializeTo(), mrpt::maps::CLandmarksMap::simulateBeaconReadings(), mrpt::maps::CLandmarksMap::simulateRangeBearingReadings(), mrpt::obs::CObservation::swap(), mrpt::ros1bridge::toROS(), and velodyne_scan_to_pointcloud().