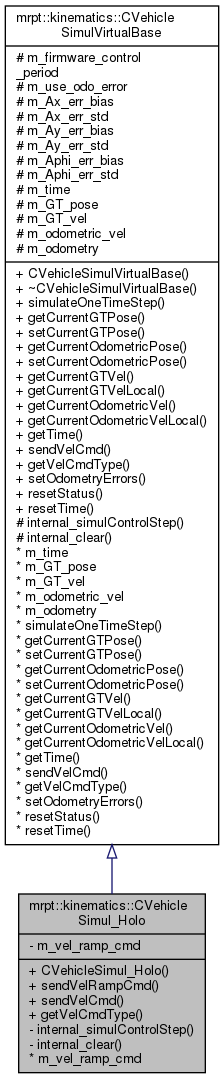
Detailed Description
Kinematic simulator of a holonomic 2D robot capable of moving in any direction, with "blended" velocity profiles.
See CVehicleSimul_Holo::sendVelCmd() for a description of the velocity commands in this kinematic model.
Definition at line 22 of file CVehicleSimul_Holo.h.
#include <mrpt/kinematics/CVehicleSimul_Holo.h>
Classes | |
| struct | TVelRampCmd |
Public Types | |
| using | kinematic_cmd_t = CVehicleVelCmd_Holo |
Public Member Functions | |
| CVehicleSimul_Holo () | |
| void | sendVelRampCmd (double vel, double dir, double ramp_time, double rot_speed) |
| Sends a velocity cmd to the holonomic robot. More... | |
| void | sendVelCmd (const CVehicleVelCmd &cmd_vel) override |
| Sends a velocity command to the robot. More... | |
| CVehicleVelCmd::Ptr | getVelCmdType () const override |
| Gets an empty velocity command object that can be queried to find out the number of velcmd components,... More... | |
Kinematic simulation and control interface | |
| void | simulateOneTimeStep (const double dt) |
| Runs the simulator during "dt" seconds. More... | |
| const mrpt::math::TPose2D & | getCurrentGTPose () const |
| Returns the instantaneous, ground truth pose in world coordinates. More... | |
| void | setCurrentGTPose (const mrpt::math::TPose2D &pose) |
| Brute-force move robot to target coordinates ("teleport") More... | |
| const mrpt::math::TPose2D & | getCurrentOdometricPose () const |
| Returns the current pose according to (noisy) odometry. More... | |
| template<typename T > | |
| void | setCurrentOdometricPose (const T &pose) |
| Brute-force overwrite robot odometry More... | |
| const mrpt::math::TTwist2D & | getCurrentGTVel () const |
| Returns the instantaneous, ground truth velocity vector (vx,vy,omega) in world coordinates. More... | |
| mrpt::math::TTwist2D | getCurrentGTVelLocal () const |
| Returns the instantaneous, ground truth velocity vector (vx,vy,omega) in the robot local frame. More... | |
| const mrpt::math::TTwist2D & | getCurrentOdometricVel () const |
| Returns the instantaneous, odometric velocity vector (vx,vy,omega) in world coordinates. More... | |
| mrpt::math::TTwist2D | getCurrentOdometricVelLocal () const |
| Returns the instantaneous, odometric velocity vector (vx,vy,omega) in the robot local frame. More... | |
| double | getTime () const |
| Get the current simulation time. More... | |
| void | setOdometryErrors (bool enabled, double Ax_err_bias=1e-3, double Ax_err_std=10e-3, double Ay_err_bias=1e-3, double Ay_err_std=10e-3, double Aphi_err_bias=mrpt::DEG2RAD(1e-3), double Aphi_err_std=mrpt::DEG2RAD(10e-3)) |
| Enable/Disable odometry errors. More... | |
| void | resetStatus () |
| void | resetTime () |
| Reset all simulator variables to 0 (except the. More... | |
Protected Attributes | |
| double | m_firmware_control_period |
| The period at which the low-level controller updates velocities (Default: 0.5 ms) More... | |
| bool | m_use_odo_error |
| Whether to corrupt odometry with noise. More... | |
| double | m_Ax_err_bias |
| double | m_Ax_err_std |
| double | m_Ay_err_bias |
| double | m_Ay_err_std |
| double | m_Aphi_err_bias |
| double | m_Aphi_err_std |
State vector | |
| double | m_time |
| simulation running time More... | |
| mrpt::math::TPose2D | m_GT_pose |
| ground truth pose in world coordinates. More... | |
| mrpt::math::TTwist2D | m_GT_vel |
| Velocity in (x,y,omega) More... | |
| mrpt::math::TTwist2D | m_odometric_vel |
| Velocity in (x,y,omega) More... | |
| mrpt::math::TPose2D | m_odometry |
Private Member Functions | |
| void | internal_simulControlStep (const double dt) override |
| void | internal_clear () override |
| Resets all pending cmds. More... | |
Private Attributes | |
Vel ramp cmds | |
| TVelRampCmd | m_vel_ramp_cmd |
| the last cmd received from the user. More... | |
Member Typedef Documentation
◆ kinematic_cmd_t
Definition at line 25 of file CVehicleSimul_Holo.h.
Constructor & Destructor Documentation
◆ CVehicleSimul_Holo()
| CVehicleSimul_Holo::CVehicleSimul_Holo | ( | ) |
Definition at line 17 of file CVehicleSimul_Holo.cpp.
References mrpt::kinematics::CVehicleSimulVirtualBase::resetStatus(), and mrpt::kinematics::CVehicleSimulVirtualBase::resetTime().
Member Function Documentation
◆ getCurrentGTPose()
|
inlineinherited |
Returns the instantaneous, ground truth pose in world coordinates.
Definition at line 44 of file CVehicleSimulVirtualBase.h.
References mrpt::kinematics::CVehicleSimulVirtualBase::m_GT_pose.
Referenced by mrpt::nav::CRobot2NavInterfaceForSimulator_Holo::getCurrentPoseAndSpeeds(), mrpt::nav::CRobot2NavInterfaceForSimulator_DiffDriven::getCurrentPoseAndSpeeds(), and run_rnav_test().
◆ getCurrentGTVel()
|
inlineinherited |
Returns the instantaneous, ground truth velocity vector (vx,vy,omega) in world coordinates.
Definition at line 63 of file CVehicleSimulVirtualBase.h.
References mrpt::kinematics::CVehicleSimulVirtualBase::m_GT_vel.
Referenced by mrpt::nav::CRobot2NavInterfaceForSimulator_Holo::getCurrentPoseAndSpeeds(), and mrpt::nav::CRobot2NavInterfaceForSimulator_DiffDriven::getCurrentPoseAndSpeeds().
◆ getCurrentGTVelLocal()
|
inherited |
Returns the instantaneous, ground truth velocity vector (vx,vy,omega) in the robot local frame.
Definition at line 89 of file CVehicleSimulVirtualBase.cpp.
References mrpt::kinematics::CVehicleSimulVirtualBase::m_GT_pose, mrpt::kinematics::CVehicleSimulVirtualBase::m_GT_vel, mrpt::math::TPose2D::phi, and mrpt::math::TTwist2D::rotate().
◆ getCurrentOdometricPose()
|
inlineinherited |
Returns the current pose according to (noisy) odometry.
- See also
- setOdometryErrors
Definition at line 50 of file CVehicleSimulVirtualBase.h.
References mrpt::kinematics::CVehicleSimulVirtualBase::m_odometry.
Referenced by mrpt::nav::CRobot2NavInterfaceForSimulator_Holo::getCurrentPoseAndSpeeds(), and mrpt::nav::CRobot2NavInterfaceForSimulator_DiffDriven::getCurrentPoseAndSpeeds().
◆ getCurrentOdometricVel()
|
inlineinherited |
Returns the instantaneous, odometric velocity vector (vx,vy,omega) in world coordinates.
Definition at line 70 of file CVehicleSimulVirtualBase.h.
References mrpt::kinematics::CVehicleSimulVirtualBase::m_odometric_vel.
◆ getCurrentOdometricVelLocal()
|
inherited |
Returns the instantaneous, odometric velocity vector (vx,vy,omega) in the robot local frame.
Definition at line 96 of file CVehicleSimulVirtualBase.cpp.
References mrpt::kinematics::CVehicleSimulVirtualBase::m_odometric_vel, mrpt::kinematics::CVehicleSimulVirtualBase::m_odometry, mrpt::math::TPose2D::phi, and mrpt::math::TTwist2D::rotate().
Referenced by mrpt::kinematics::CVehicleSimulVirtualBase::simulateOneTimeStep().
◆ getTime()
|
inlineinherited |
Get the current simulation time.
Definition at line 79 of file CVehicleSimulVirtualBase.h.
References mrpt::kinematics::CVehicleSimulVirtualBase::m_time.
Referenced by mrpt::nav::CRobot2NavInterfaceForSimulator_Holo::getNavigationTime(), mrpt::nav::CRobot2NavInterfaceForSimulator_DiffDriven::getNavigationTime(), mrpt::nav::CRobot2NavInterfaceForSimulator_Holo::resetNavigationTimer(), and mrpt::nav::CRobot2NavInterfaceForSimulator_DiffDriven::resetNavigationTimer().
◆ getVelCmdType()
|
inlineoverridevirtual |
Gets an empty velocity command object that can be queried to find out the number of velcmd components,...
Implements mrpt::kinematics::CVehicleSimulVirtualBase.
Definition at line 51 of file CVehicleSimul_Holo.h.
◆ internal_clear()
|
overrideprivatevirtual |
Resets all pending cmds.
Implements mrpt::kinematics::CVehicleSimulVirtualBase.
Definition at line 72 of file CVehicleSimul_Holo.cpp.
References m_vel_ramp_cmd.
◆ internal_simulControlStep()
|
overrideprivatevirtual |
Implements mrpt::kinematics::CVehicleSimulVirtualBase.
Definition at line 23 of file CVehicleSimul_Holo.cpp.
References mrpt::DEG2RAD(), mrpt::kinematics::CVehicleSimul_Holo::TVelRampCmd::dir, mrpt::kinematics::CVehicleSimul_Holo::TVelRampCmd::init_vel, mrpt::kinematics::CVehicleSimul_Holo::TVelRampCmd::issue_time, mrpt::kinematics::CVehicleSimulVirtualBase::m_odometric_vel, mrpt::kinematics::CVehicleSimulVirtualBase::m_odometry, mrpt::kinematics::CVehicleSimulVirtualBase::m_time, m_vel_ramp_cmd, mrpt::math::TTwist2D::omega, mrpt::math::TPose2D::phi, mrpt::kinematics::CVehicleSimul_Holo::TVelRampCmd::ramp_time, mrpt::kinematics::CVehicleSimul_Holo::TVelRampCmd::rot_speed, mrpt::sign(), mrpt::kinematics::CVehicleSimul_Holo::TVelRampCmd::target_vel_x, mrpt::kinematics::CVehicleSimul_Holo::TVelRampCmd::target_vel_y, mrpt::math::TTwist2D::vx, mrpt::math::TTwist2D::vy, and mrpt::math::wrapToPi().
◆ resetStatus()
|
inherited |
Definition at line 79 of file CVehicleSimulVirtualBase.cpp.
References mrpt::kinematics::CVehicleSimulVirtualBase::internal_clear(), mrpt::kinematics::CVehicleSimulVirtualBase::m_GT_pose, mrpt::kinematics::CVehicleSimulVirtualBase::m_GT_vel, mrpt::kinematics::CVehicleSimulVirtualBase::m_odometric_vel, and mrpt::kinematics::CVehicleSimulVirtualBase::m_odometry.
Referenced by mrpt::kinematics::CVehicleSimul_DiffDriven::CVehicleSimul_DiffDriven(), and CVehicleSimul_Holo().
◆ resetTime()
|
inherited |
Reset all simulator variables to 0 (except the.
simulation time).
- See also
- resetTime Reset time counter
- resetStatus
Definition at line 88 of file CVehicleSimulVirtualBase.cpp.
References mrpt::kinematics::CVehicleSimulVirtualBase::m_time.
Referenced by mrpt::kinematics::CVehicleSimul_DiffDriven::CVehicleSimul_DiffDriven(), and CVehicleSimul_Holo().
◆ sendVelCmd()
|
inlineoverridevirtual |
Sends a velocity command to the robot.
The number of components and their meaning depends on the vehicle-kinematics derived class
Implements mrpt::kinematics::CVehicleSimulVirtualBase.
Definition at line 39 of file CVehicleSimul_Holo.h.
References ASSERTMSG_, mrpt::kinematics::CVehicleVelCmd_Holo::dir_local, mrpt::kinematics::CVehicleSimulVirtualBase::m_odometry, mrpt::math::TPose2D::phi, mrpt::kinematics::CVehicleVelCmd_Holo::ramp_time, mrpt::kinematics::CVehicleVelCmd_Holo::rot_speed, sendVelRampCmd(), and mrpt::kinematics::CVehicleVelCmd_Holo::vel.
Referenced by mrpt::nav::CRobot2NavInterfaceForSimulator_Holo::changeSpeeds().
◆ sendVelRampCmd()
| void CVehicleSimul_Holo::sendVelRampCmd | ( | double | vel, |
| double | dir, | ||
| double | ramp_time, | ||
| double | rot_speed | ||
| ) |
Sends a velocity cmd to the holonomic robot.
- Parameters
-
[in] vel Linear speed (m/s) [in] dir Direction (rad) (In the odometry frame of reference) [in] ramp_time Blend the cmd during this period (seconds) [in] rot_speed Rotational speed while there is heading error and to this constant (rad/s)
Definition at line 73 of file CVehicleSimul_Holo.cpp.
References ASSERT_ABOVE_, mrpt::kinematics::CVehicleSimul_Holo::TVelRampCmd::dir, dir, mrpt::kinematics::CVehicleSimul_Holo::TVelRampCmd::init_vel, mrpt::kinematics::CVehicleSimul_Holo::TVelRampCmd::issue_time, mrpt::kinematics::CVehicleSimulVirtualBase::m_odometric_vel, mrpt::kinematics::CVehicleSimulVirtualBase::m_time, m_vel_ramp_cmd, mrpt::kinematics::CVehicleSimul_Holo::TVelRampCmd::ramp_time, mrpt::kinematics::CVehicleSimul_Holo::TVelRampCmd::rot_speed, mrpt::kinematics::CVehicleSimul_Holo::TVelRampCmd::target_vel_x, and mrpt::kinematics::CVehicleSimul_Holo::TVelRampCmd::target_vel_y.
Referenced by sendVelCmd(), and mrpt::nav::CRobot2NavInterfaceForSimulator_Holo::stop().
◆ setCurrentGTPose()
|
inherited |
Brute-force move robot to target coordinates ("teleport")
Definition at line 24 of file CVehicleSimulVirtualBase.cpp.
References mrpt::kinematics::CVehicleSimulVirtualBase::m_GT_pose.
◆ setCurrentOdometricPose()
|
inlineinherited |
Brute-force overwrite robot odometry
Definition at line 56 of file CVehicleSimulVirtualBase.h.
References mrpt::kinematics::CVehicleSimulVirtualBase::m_odometry.
◆ setOdometryErrors()
|
inlineinherited |
Enable/Disable odometry errors.
Errors in odometry are 1 sigma Gaussian values per second
Definition at line 90 of file CVehicleSimulVirtualBase.h.
References mrpt::kinematics::CVehicleSimulVirtualBase::m_Aphi_err_bias, mrpt::kinematics::CVehicleSimulVirtualBase::m_Aphi_err_std, mrpt::kinematics::CVehicleSimulVirtualBase::m_Ax_err_bias, mrpt::kinematics::CVehicleSimulVirtualBase::m_Ax_err_std, mrpt::kinematics::CVehicleSimulVirtualBase::m_Ay_err_bias, mrpt::kinematics::CVehicleSimulVirtualBase::m_Ay_err_std, and mrpt::kinematics::CVehicleSimulVirtualBase::m_use_odo_error.
◆ simulateOneTimeStep()
|
inherited |
Runs the simulator during "dt" seconds.
It will be split into periods of "m_firmware_control_period".
Definition at line 29 of file CVehicleSimulVirtualBase.cpp.
References mrpt::random::CRandomGenerator::drawGaussian1D_normalized(), mrpt::kinematics::CVehicleSimulVirtualBase::getCurrentOdometricVelLocal(), mrpt::random::getRandomGenerator(), mrpt::kinematics::CVehicleSimulVirtualBase::internal_simulControlStep(), mrpt::kinematics::CVehicleSimulVirtualBase::m_Aphi_err_bias, mrpt::kinematics::CVehicleSimulVirtualBase::m_Aphi_err_std, mrpt::kinematics::CVehicleSimulVirtualBase::m_Ax_err_bias, mrpt::kinematics::CVehicleSimulVirtualBase::m_Ax_err_std, mrpt::kinematics::CVehicleSimulVirtualBase::m_Ay_err_bias, mrpt::kinematics::CVehicleSimulVirtualBase::m_Ay_err_std, mrpt::kinematics::CVehicleSimulVirtualBase::m_firmware_control_period, mrpt::kinematics::CVehicleSimulVirtualBase::m_GT_pose, mrpt::kinematics::CVehicleSimulVirtualBase::m_GT_vel, mrpt::kinematics::CVehicleSimulVirtualBase::m_odometric_vel, mrpt::kinematics::CVehicleSimulVirtualBase::m_odometry, mrpt::kinematics::CVehicleSimulVirtualBase::m_time, mrpt::kinematics::CVehicleSimulVirtualBase::m_use_odo_error, mrpt::math::TTwist2D::omega, mrpt::math::TPose2D::phi, mrpt::math::TTwist2D::rotate(), mrpt::math::TTwist2D::vx, mrpt::math::TTwist2D::vy, mrpt::math::wrapToPiInPlace(), and mrpt::math::TPose2D::x.
Referenced by run_rnav_test().
Member Data Documentation
◆ m_Aphi_err_bias
|
protectedinherited |
Definition at line 133 of file CVehicleSimulVirtualBase.h.
Referenced by mrpt::kinematics::CVehicleSimulVirtualBase::setOdometryErrors(), and mrpt::kinematics::CVehicleSimulVirtualBase::simulateOneTimeStep().
◆ m_Aphi_err_std
|
protectedinherited |
Definition at line 133 of file CVehicleSimulVirtualBase.h.
Referenced by mrpt::kinematics::CVehicleSimulVirtualBase::setOdometryErrors(), and mrpt::kinematics::CVehicleSimulVirtualBase::simulateOneTimeStep().
◆ m_Ax_err_bias
|
protectedinherited |
Definition at line 131 of file CVehicleSimulVirtualBase.h.
Referenced by mrpt::kinematics::CVehicleSimulVirtualBase::setOdometryErrors(), and mrpt::kinematics::CVehicleSimulVirtualBase::simulateOneTimeStep().
◆ m_Ax_err_std
|
protectedinherited |
Definition at line 131 of file CVehicleSimulVirtualBase.h.
Referenced by mrpt::kinematics::CVehicleSimulVirtualBase::setOdometryErrors(), and mrpt::kinematics::CVehicleSimulVirtualBase::simulateOneTimeStep().
◆ m_Ay_err_bias
|
protectedinherited |
Definition at line 132 of file CVehicleSimulVirtualBase.h.
Referenced by mrpt::kinematics::CVehicleSimulVirtualBase::setOdometryErrors(), and mrpt::kinematics::CVehicleSimulVirtualBase::simulateOneTimeStep().
◆ m_Ay_err_std
|
protectedinherited |
Definition at line 132 of file CVehicleSimulVirtualBase.h.
Referenced by mrpt::kinematics::CVehicleSimulVirtualBase::setOdometryErrors(), and mrpt::kinematics::CVehicleSimulVirtualBase::simulateOneTimeStep().
◆ m_firmware_control_period
|
protectedinherited |
The period at which the low-level controller updates velocities (Default: 0.5 ms)
Definition at line 127 of file CVehicleSimulVirtualBase.h.
Referenced by mrpt::kinematics::CVehicleSimulVirtualBase::simulateOneTimeStep().
◆ m_GT_pose
|
protectedinherited |
ground truth pose in world coordinates.
Definition at line 118 of file CVehicleSimulVirtualBase.h.
Referenced by mrpt::kinematics::CVehicleSimulVirtualBase::getCurrentGTPose(), mrpt::kinematics::CVehicleSimulVirtualBase::getCurrentGTVelLocal(), mrpt::kinematics::CVehicleSimulVirtualBase::resetStatus(), mrpt::kinematics::CVehicleSimulVirtualBase::setCurrentGTPose(), and mrpt::kinematics::CVehicleSimulVirtualBase::simulateOneTimeStep().
◆ m_GT_vel
|
protectedinherited |
Velocity in (x,y,omega)
Definition at line 120 of file CVehicleSimulVirtualBase.h.
Referenced by mrpt::kinematics::CVehicleSimulVirtualBase::getCurrentGTVel(), mrpt::kinematics::CVehicleSimulVirtualBase::getCurrentGTVelLocal(), mrpt::kinematics::CVehicleSimulVirtualBase::resetStatus(), and mrpt::kinematics::CVehicleSimulVirtualBase::simulateOneTimeStep().
◆ m_odometric_vel
|
protectedinherited |
Velocity in (x,y,omega)
Definition at line 122 of file CVehicleSimulVirtualBase.h.
Referenced by mrpt::kinematics::CVehicleSimulVirtualBase::getCurrentOdometricVel(), mrpt::kinematics::CVehicleSimulVirtualBase::getCurrentOdometricVelLocal(), mrpt::kinematics::CVehicleSimul_DiffDriven::internal_simulControlStep(), internal_simulControlStep(), mrpt::kinematics::CVehicleSimulVirtualBase::resetStatus(), sendVelRampCmd(), and mrpt::kinematics::CVehicleSimulVirtualBase::simulateOneTimeStep().
◆ m_odometry
|
protectedinherited |
Definition at line 123 of file CVehicleSimulVirtualBase.h.
Referenced by mrpt::kinematics::CVehicleSimulVirtualBase::getCurrentOdometricPose(), mrpt::kinematics::CVehicleSimulVirtualBase::getCurrentOdometricVelLocal(), mrpt::kinematics::CVehicleSimul_DiffDriven::internal_simulControlStep(), internal_simulControlStep(), mrpt::kinematics::CVehicleSimulVirtualBase::resetStatus(), sendVelCmd(), mrpt::kinematics::CVehicleSimulVirtualBase::setCurrentOdometricPose(), and mrpt::kinematics::CVehicleSimulVirtualBase::simulateOneTimeStep().
◆ m_time
|
protectedinherited |
simulation running time
Definition at line 116 of file CVehicleSimulVirtualBase.h.
Referenced by mrpt::kinematics::CVehicleSimulVirtualBase::getTime(), mrpt::kinematics::CVehicleSimul_DiffDriven::internal_simulControlStep(), internal_simulControlStep(), mrpt::kinematics::CVehicleSimul_DiffDriven::movementCommand(), mrpt::kinematics::CVehicleSimulVirtualBase::resetTime(), sendVelRampCmd(), and mrpt::kinematics::CVehicleSimulVirtualBase::simulateOneTimeStep().
◆ m_use_odo_error
|
protectedinherited |
Whether to corrupt odometry with noise.
Definition at line 130 of file CVehicleSimulVirtualBase.h.
Referenced by mrpt::kinematics::CVehicleSimulVirtualBase::setOdometryErrors(), and mrpt::kinematics::CVehicleSimulVirtualBase::simulateOneTimeStep().
◆ m_vel_ramp_cmd
|
private |
the last cmd received from the user.
Definition at line 70 of file CVehicleSimul_Holo.h.
Referenced by internal_clear(), internal_simulControlStep(), and sendVelRampCmd().