Detailed Description
Declares a class that represents a Probability Density function (PDF) of a 2D pose ![$ p(\mathbf{x}) = [x ~ y ~ \phi ]^t $](form_109.png) .
.
This class implements that PDF using a mono-modal Gaussian distribution. See mrpt::poses::CPosePDF for more details.
- See also
- CPose2D, CPosePDF, CPosePDFParticles
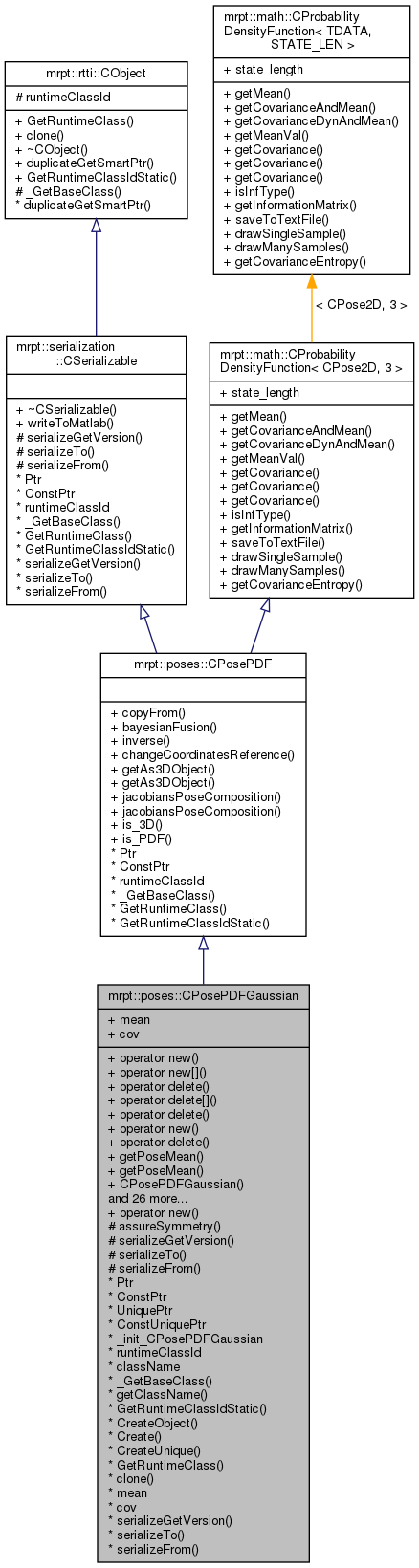
Definition at line 29 of file CPosePDFGaussian.h.
#include <mrpt/poses/CPosePDFGaussian.h>
Public Types | |
| enum | { is_3D_val = 0 } |
| enum | { is_PDF_val = 1 } |
| using | type_value = CPose2D |
| The type of the state the PDF represents. More... | |
| using | self_t = CProbabilityDensityFunction< CPose2D, STATE_LEN > |
Public Member Functions | |
| void * | operator new (size_t size) |
| void * | operator new[] (size_t size) |
| void | operator delete (void *ptr) noexcept |
| void | operator delete[] (void *ptr) noexcept |
| void | operator delete (void *memory, void *ptr) noexcept |
| void * | operator new (size_t size, const std::nothrow_t &) noexcept |
| void | operator delete (void *ptr, const std::nothrow_t &) noexcept |
| const CPose2D & | getPoseMean () const |
| CPose2D & | getPoseMean () |
| CPosePDFGaussian () | |
| Default constructor. More... | |
| CPosePDFGaussian (const CPose2D &init_Mean) | |
| Constructor. More... | |
| CPosePDFGaussian (const CPose2D &init_Mean, const mrpt::math::CMatrixDouble33 &init_Cov) | |
| Constructor. More... | |
| CPosePDFGaussian (const CPosePDF &o) | |
| Copy constructor, including transformations between other PDFs. More... | |
| CPosePDFGaussian (const CPose3DPDF &o) | |
| Copy constructor, including transformations between other PDFs. More... | |
| void | getMean (CPose2D &mean_pose) const override |
| Returns an estimate of the pose, (the mean, or mathematical expectation of the PDF). More... | |
| void | getCovarianceAndMean (mrpt::math::CMatrixDouble33 &out_cov, CPose2D &mean_point) const override |
| Returns an estimate of the pose covariance matrix (3x3 cov matrix) and the mean, both at once. More... | |
| void | copyFrom (const CPosePDF &o) override |
| Copy operator, translating if necesary (for example, between particles and gaussian representations) More... | |
| void | copyFrom (const CPose3DPDF &o) |
| Copy operator, translating if necesary (for example, between particles and gaussian representations) More... | |
| bool | saveToTextFile (const std::string &file) const override |
| Save PDF's particles to a text file, containing the 2D pose in the first line, then the covariance matrix in next 3 lines. More... | |
| void | changeCoordinatesReference (const CPose3D &newReferenceBase) override |
| this = p (+) this. More... | |
| void | changeCoordinatesReference (const CPose2D &newReferenceBase) |
| this = p (+) this. More... | |
| void | rotateCov (const double ang) |
Rotate the covariance matrix by replacing it by  , where , where ![$ \mathbf{R} = \left[ \begin{array}{ccc} \cos\alpha & -\sin\alpha & 0 \\ \sin\alpha & \cos\alpha & 0 \\ 0 & 0 & 1 \end{array}\right] $](form_113.png) . More... . More... | |
| void | inverseComposition (const CPosePDFGaussian &x, const CPosePDFGaussian &ref) |
Set  , computing the mean using the "-" operator and the covariances through the corresponding Jacobians (For 'x0' and 'x1' being independent variables!). More... , computing the mean using the "-" operator and the covariances through the corresponding Jacobians (For 'x0' and 'x1' being independent variables!). More... | |
| void | inverseComposition (const CPosePDFGaussian &x1, const CPosePDFGaussian &x0, const mrpt::math::CMatrixDouble33 &COV_01) |
| Set , computing the mean using the "-" operator and the covariances through the corresponding Jacobians (Given the 3x3 cross-covariance matrix of variables x0 and x1). More... | |
| void | drawSingleSample (CPose2D &outPart) const override |
| Draws a single sample from the distribution. More... | |
| void | drawManySamples (size_t N, std::vector< mrpt::math::CVectorDouble > &outSamples) const override |
| Draws a number of samples from the distribution, and saves as a list of 1x3 vectors, where each row contains a (x,y,phi) datum. More... | |
| void | bayesianFusion (const CPosePDF &p1, const CPosePDF &p2, const double minMahalanobisDistToDrop=0) override |
| Bayesian fusion of two points gauss. More... | |
| void | inverse (CPosePDF &o) const override |
| Returns a new PDF such as: NEW_PDF = (0,0,0) - THIS_PDF. More... | |
| void | operator+= (const CPose2D &Ap) |
| Makes: thisPDF = thisPDF + Ap, where "+" is pose composition (both the mean, and the covariance matrix are updated). More... | |
| double | evaluatePDF (const CPose2D &x) const |
| Evaluates the PDF at a given point. More... | |
| double | evaluateNormalizedPDF (const CPose2D &x) const |
| Evaluates the ratio PDF(x) / PDF(MEAN), that is, the normalized PDF in the range [0,1]. More... | |
| double | mahalanobisDistanceTo (const CPosePDFGaussian &theOther) |
| Computes the Mahalanobis distance between the centers of two Gaussians. More... | |
| void | assureMinCovariance (const double &minStdXY, const double &minStdPhi) |
| Substitutes the diagonal elements if (square) they are below some given minimum values (Use this before bayesianFusion, for example, to avoid inversion of singular matrixes, etc...) More... | |
| void | operator+= (const CPosePDFGaussian &Ap) |
| Makes: thisPDF = thisPDF + Ap, where "+" is pose composition (both the mean, and the covariance matrix are updated) (see formulas in jacobiansPoseComposition ). More... | |
| void | operator-= (const CPosePDFGaussian &ref) |
| Makes: thisPDF = thisPDF - Ap, where "-" is pose inverse composition (both the mean, and the covariance matrix are updated) More... | |
| void | composePoint (const mrpt::math::TPoint2D &l, CPoint2DPDFGaussian &g) const |
Returns the PDF of the 2D point  with "q"=this pose and "l" a point without uncertainty. More... with "q"=this pose and "l" a point without uncertainty. More... | |
| template<class OPENGL_SETOFOBJECTSPTR > | |
| void | getAs3DObject (OPENGL_SETOFOBJECTSPTR &out_obj) const |
| Returns a 3D representation of this PDF (it doesn't clear the current contents of out_obj, but append new OpenGL objects to that list) More... | |
| template<class OPENGL_SETOFOBJECTSPTR > | |
| OPENGL_SETOFOBJECTSPTR | getAs3DObject () const |
| Returns a 3D representation of this PDF. More... | |
| virtual mxArray * | writeToMatlab () const |
Introduces a pure virtual method responsible for writing to a mxArray Matlab object, typically a MATLAB struct whose contents are documented in each derived class. More... | |
| virtual void | getMean (CPose2D &mean_point) const=0 |
| Returns the mean, or mathematical expectation of the probability density distribution (PDF). More... | |
| virtual void | getCovarianceAndMean (mrpt::math::CMatrixFixedNumeric< double, STATE_LEN, STATE_LEN > &cov, CPose2D &mean_point) const=0 |
| Returns an estimate of the pose covariance matrix (STATE_LENxSTATE_LEN cov matrix) and the mean, both at once. More... | |
| void | getCovarianceDynAndMean (mrpt::math::CMatrixDouble &cov, CPose2D &mean_point) const |
| Returns an estimate of the pose covariance matrix (STATE_LENxSTATE_LEN cov matrix) and the mean, both at once. More... | |
| CPose2D | getMeanVal () const |
| Returns the mean, or mathematical expectation of the probability density distribution (PDF). More... | |
| void | getCovariance (mrpt::math::CMatrixDouble &cov) const |
| Returns the estimate of the covariance matrix (STATE_LEN x STATE_LEN covariance matrix) More... | |
| void | getCovariance (mrpt::math::CMatrixFixedNumeric< double, STATE_LEN, STATE_LEN > &cov) const |
| Returns the estimate of the covariance matrix (STATE_LEN x STATE_LEN covariance matrix) More... | |
| mrpt::math::CMatrixFixedNumeric< double, STATE_LEN, STATE_LEN > | getCovariance () const |
| Returns the estimate of the covariance matrix (STATE_LEN x STATE_LEN covariance matrix) More... | |
| virtual bool | isInfType () const |
| Returns whether the class instance holds the uncertainty in covariance or information form. More... | |
| virtual void | getInformationMatrix (mrpt::math::CMatrixFixedNumeric< double, STATE_LEN, STATE_LEN > &inf) const |
| Returns the information (inverse covariance) matrix (a STATE_LEN x STATE_LEN matrix) Unless reimplemented in derived classes, this method first reads the covariance, then invert it. More... | |
| virtual void | drawSingleSample (CPose2D &outPart) const=0 |
| Draws a single sample from the distribution. More... | |
| double | getCovarianceEntropy () const |
| Compute the entropy of the estimated covariance matrix. More... | |
RTTI classes and functions for polymorphic hierarchies | |
| mrpt::rtti::CObject::Ptr | duplicateGetSmartPtr () const |
| Returns a copy of the object, indepently of its class, as a smart pointer (the newly created object will exist as long as any copy of this smart pointer). More... | |
Static Public Member Functions | |
| static void * | operator new (size_t size, void *ptr) |
| static void | jacobiansPoseComposition (const CPose2D &x, const CPose2D &u, mrpt::math::CMatrixDouble33 &df_dx, mrpt::math::CMatrixDouble33 &df_du, const bool compute_df_dx=true, const bool compute_df_du=true) |
| This static method computes the pose composition Jacobians, with these formulas: More... | |
| static void | jacobiansPoseComposition (const CPosePDFGaussian &x, const CPosePDFGaussian &u, mrpt::math::CMatrixDouble33 &df_dx, mrpt::math::CMatrixDouble33 &df_du) |
| This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts. More... | |
| static constexpr bool | is_3D () |
| static constexpr bool | is_PDF () |
Public Attributes | |
Data fields | |
| CPose2D | mean |
| The mean value. More... | |
| mrpt::math::CMatrixDouble33 | cov |
| The 3x3 covariance matrix. More... | |
Static Public Attributes | |
| static constexpr size_t | state_length |
| The length of the variable, for example, 3 for a 3D point, 6 for a 3D pose (x y z yaw pitch roll). More... | |
Protected Member Functions | |
| void | assureSymmetry () |
| Assures the symmetry of the covariance matrix (eventually certain operations in the math-coprocessor lead to non-symmetric matrixes!) More... | |
CSerializable virtual methods | |
| uint8_t | serializeGetVersion () const override |
| Must return the current versioning number of the object. More... | |
| void | serializeTo (mrpt::serialization::CArchive &out) const override |
| Pure virtual method for writing (serializing) to an abstract archive. More... | |
| void | serializeFrom (mrpt::serialization::CArchive &in, uint8_t serial_version) override |
| Pure virtual method for reading (deserializing) from an abstract archive. More... | |
RTTI stuff <br> | |
| using | Ptr = std::shared_ptr< CPosePDFGaussian > |
| using | ConstPtr = std::shared_ptr< const CPosePDFGaussian > |
| using | UniquePtr = std::unique_ptr< CPosePDFGaussian > |
| using | ConstUniquePtr = std::unique_ptr< const CPosePDFGaussian > |
| static mrpt::rtti::CLASSINIT | _init_CPosePDFGaussian |
| static const mrpt::rtti::TRuntimeClassId | runtimeClassId |
| static constexpr const char * | className = "CPosePDFGaussian" |
| static const mrpt::rtti::TRuntimeClassId * | _GetBaseClass () |
| static constexpr auto | getClassName () |
| static const mrpt::rtti::TRuntimeClassId & | GetRuntimeClassIdStatic () |
| static mrpt::rtti::CObject * | CreateObject () |
| template<typename... Args> | |
| static Ptr | Create (Args &&... args) |
| template<typename... Args> | |
| static UniquePtr | CreateUnique (Args &&... args) |
| virtual const mrpt::rtti::TRuntimeClassId * | GetRuntimeClass () const override |
| Returns information about the class of an object in runtime. More... | |
| virtual mrpt::rtti::CObject * | clone () const override |
| Returns a deep copy (clone) of the object, indepently of its class. More... | |
Member Typedef Documentation
◆ ConstPtr
| using mrpt::poses::CPosePDFGaussian::ConstPtr = std::shared_ptr<const CPosePDFGaussian > |
Definition at line 31 of file CPosePDFGaussian.h.
◆ ConstUniquePtr
| using mrpt::poses::CPosePDFGaussian::ConstUniquePtr = std::unique_ptr<const CPosePDFGaussian > |
Definition at line 31 of file CPosePDFGaussian.h.
◆ Ptr
| using mrpt::poses::CPosePDFGaussian::Ptr = std::shared_ptr< CPosePDFGaussian > |
A type for the associated smart pointer
Definition at line 31 of file CPosePDFGaussian.h.
◆ self_t
|
inherited |
Definition at line 34 of file CProbabilityDensityFunction.h.
◆ type_value
|
inherited |
The type of the state the PDF represents.
Definition at line 33 of file CProbabilityDensityFunction.h.
◆ UniquePtr
| using mrpt::poses::CPosePDFGaussian::UniquePtr = std::unique_ptr< CPosePDFGaussian > |
Definition at line 31 of file CPosePDFGaussian.h.
Member Enumeration Documentation
◆ anonymous enum
|
inherited |
| Enumerator | |
|---|---|
| is_3D_val | |
Definition at line 95 of file CPosePDF.h.
◆ anonymous enum
|
inherited |
| Enumerator | |
|---|---|
| is_PDF_val | |
Definition at line 100 of file CPosePDF.h.
Constructor & Destructor Documentation
◆ CPosePDFGaussian() [1/5]
| CPosePDFGaussian::CPosePDFGaussian | ( | ) |
Default constructor.
Definition at line 39 of file CPosePDFGaussian.cpp.
◆ CPosePDFGaussian() [2/5]
|
explicit |
◆ CPosePDFGaussian() [3/5]
| CPosePDFGaussian::CPosePDFGaussian | ( | const CPose2D & | init_Mean, |
| const mrpt::math::CMatrixDouble33 & | init_Cov | ||
| ) |
Constructor.
Definition at line 43 of file CPosePDFGaussian.cpp.
◆ CPosePDFGaussian() [4/5]
|
inlineexplicit |
Copy constructor, including transformations between other PDFs.
Definition at line 66 of file CPosePDFGaussian.h.
References copyFrom().
◆ CPosePDFGaussian() [5/5]
|
inlineexplicit |
Copy constructor, including transformations between other PDFs.
Definition at line 68 of file CPosePDFGaussian.h.
References copyFrom().
Member Function Documentation
◆ _GetBaseClass()
|
staticprotected |
◆ assureMinCovariance()
| void CPosePDFGaussian::assureMinCovariance | ( | const double & | minStdXY, |
| const double & | minStdPhi | ||
| ) |
Substitutes the diagonal elements if (square) they are below some given minimum values (Use this before bayesianFusion, for example, to avoid inversion of singular matrixes, etc...)
Definition at line 397 of file CPosePDFGaussian.cpp.
References cov, and mrpt::square().
◆ assureSymmetry()
|
protected |
Assures the symmetry of the covariance matrix (eventually certain operations in the math-coprocessor lead to non-symmetric matrixes!)
Definition at line 334 of file CPosePDFGaussian.cpp.
References cov.
Referenced by bayesianFusion().
◆ bayesianFusion()
|
overridevirtual |
Bayesian fusion of two points gauss.
distributions, then save the result in this object. The process is as follows:
- (x1,S1): Mean and variance of the p1 distribution.
- (x2,S2): Mean and variance of the p2 distribution.
- (x,S): Mean and variance of the resulting distribution.
S = (S1-1 + S2-1)-1; x = S * ( S1-1*x1 + S2-1*x2 );
Implements mrpt::poses::CPosePDF.
Definition at line 233 of file CPosePDFGaussian.cpp.
References ASSERT_, assureSymmetry(), CLASS_ID, cov, mrpt::poses::CPosePDF::GetRuntimeClass(), mean, MRPT_END, MRPT_START, MRPT_UNUSED_PARAM, mrpt::poses::CPose2D::normalizePhi(), mrpt::poses::CPose2D::phi(), mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::x(), and mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::y().
Referenced by mrpt::poses::CPosePDFSOG::bayesianFusion().
◆ changeCoordinatesReference() [1/2]
this = p (+) this.
This can be used to convert a PDF from local coordinates to global, providing the point (newReferenceBase) from which "to project" the current pdf. Result PDF substituted the currently stored one in the object.
Definition at line 160 of file CPosePDFGaussian.cpp.
References mrpt::poses::CPose2D::composeFrom(), mean, mrpt::poses::CPose2D::phi(), and rotateCov().
◆ changeCoordinatesReference() [2/2]
|
overridevirtual |
this = p (+) this.
This can be used to convert a PDF from local coordinates to global, providing the point (newReferenceBase) from which "to project" the current pdf. Result PDF substituted the currently stored one in the object.
Implements mrpt::poses::CPosePDF.
Definition at line 145 of file CPosePDFGaussian.cpp.
References mrpt::poses::CPose2D::composeFrom(), mean, mrpt::poses::CPose2D::phi(), and rotateCov().
Referenced by operator+().
◆ clone()
|
overridevirtual |
Returns a deep copy (clone) of the object, indepently of its class.
Implements mrpt::rtti::CObject.
◆ composePoint()
| void CPosePDFGaussian::composePoint | ( | const mrpt::math::TPoint2D & | l, |
| CPoint2DPDFGaussian & | g | ||
| ) | const |
Returns the PDF of the 2D point with "q"=this pose and "l" a point without uncertainty.
Definition at line 524 of file CPosePDFGaussian.cpp.
References mrpt::poses::CPose2D::composePoint(), cov, mrpt::poses::CPosePDF::jacobiansPoseComposition(), mean, mrpt::math::UNINITIALIZED_MATRIX, mrpt::math::TPoint2D::x, and mrpt::math::TPoint2D::y.
Referenced by mrpt::tfest::se2_l2_robust().
◆ copyFrom() [1/2]
| void CPosePDFGaussian::copyFrom | ( | const CPose3DPDF & | o | ) |
Copy operator, translating if necesary (for example, between particles and gaussian representations)
Definition at line 110 of file CPosePDFGaussian.cpp.
References cov, mrpt::math::CProbabilityDensityFunction< TDATA, STATE_LEN >::getCovariance(), mrpt::math::CProbabilityDensityFunction< TDATA, STATE_LEN >::getMeanVal(), and mean.
◆ copyFrom() [2/2]
Copy operator, translating if necesary (for example, between particles and gaussian representations)
Implements mrpt::poses::CPosePDF.
Definition at line 98 of file CPosePDFGaussian.cpp.
References cov, mrpt::math::CProbabilityDensityFunction< TDATA, STATE_LEN >::getCovariance(), mrpt::math::CProbabilityDensityFunction< TDATA, STATE_LEN >::getMean(), and mean.
Referenced by CPosePDFGaussian(), mrpt::poses::CPoseRandomSampler::getOriginalPDFCov2D(), mrpt::slam::CRangeBearingKFSLAM::OnTransitionNoise(), mrpt::hmtslam::CLSLAM_RBPF_2DLASER::prediction_and_update_pfOptimalProposal(), mrpt::maps::CMultiMetricMapPDF::prediction_and_update_pfOptimalProposal(), and mrpt::slam::CMetricMapBuilderICP::processObservation().
◆ Create()
|
inlinestatic |
Definition at line 31 of file CPosePDFGaussian.h.
◆ CreateObject()
|
static |
◆ CreateUnique()
|
inlinestatic |
Definition at line 31 of file CPosePDFGaussian.h.
◆ drawManySamples()
|
overridevirtual |
Draws a number of samples from the distribution, and saves as a list of 1x3 vectors, where each row contains a (x,y,phi) datum.
Reimplemented from mrpt::math::CProbabilityDensityFunction< CPose2D, 3 >.
Definition at line 208 of file CPosePDFGaussian.cpp.
References cov, mrpt::random::CRandomGenerator::drawGaussianMultivariateMany(), mrpt::random::getRandomGenerator(), mean, MRPT_END, MRPT_START, mrpt::poses::CPose2D::phi(), mrpt::math::wrapToPiInPlace(), mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::x(), and mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::y().
◆ drawSingleSample() [1/2]
Draws a single sample from the distribution.
Definition at line 187 of file CPosePDFGaussian.cpp.
References cov, mrpt::random::CRandomGenerator::drawGaussianMultivariate(), mrpt::random::getRandomGenerator(), mean, MRPT_END_WITH_CLEAN_UP, MRPT_START, mrpt::poses::CPose2D::normalizePhi(), mrpt::poses::CPose2D::phi(), mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::x(), and mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::y().
◆ drawSingleSample() [2/2]
|
pure virtualinherited |
Draws a single sample from the distribution.
◆ duplicateGetSmartPtr()
|
inlineinherited |
Returns a copy of the object, indepently of its class, as a smart pointer (the newly created object will exist as long as any copy of this smart pointer).
Definition at line 168 of file CObject.h.
References mrpt::rtti::CObject::clone().
Referenced by mrpt::obs::CRawlog::addActions(), and mrpt::obs::CRawlog::addObservations().
◆ evaluateNormalizedPDF()
| double CPosePDFGaussian::evaluateNormalizedPDF | ( | const CPose2D & | x | ) | const |
Evaluates the ratio PDF(x) / PDF(MEAN), that is, the normalized PDF in the range [0,1].
Definition at line 322 of file CPosePDFGaussian.cpp.
References cov, mean, and mrpt::math::normalPDF().
◆ evaluatePDF()
| double CPosePDFGaussian::evaluatePDF | ( | const CPose2D & | x | ) | const |
Evaluates the PDF at a given point.
Definition at line 311 of file CPosePDFGaussian.cpp.
References cov, mean, and mrpt::math::normalPDF().
◆ getAs3DObject() [1/2]
|
inlineinherited |
Returns a 3D representation of this PDF.
- Note
- Needs the mrpt-opengl library, and using mrpt::opengl::CSetOfObjects::Ptr as template argument.
Definition at line 125 of file CPosePDF.h.
References mrpt::opengl::posePDF2opengl().
◆ getAs3DObject() [2/2]
|
inlineinherited |
Returns a 3D representation of this PDF (it doesn't clear the current contents of out_obj, but append new OpenGL objects to that list)
- Note
- Needs the mrpt-opengl library, and using mrpt::opengl::CSetOfObjects::Ptr as template argument.
- By default, ellipsoids for the confidence intervals of "q=3" are drawn; for more mathematical details, see CGeneralizedEllipsoidTemplate::setQuantiles()
Definition at line 114 of file CPosePDF.h.
References mrpt::opengl::posePDF2opengl().
◆ getClassName()
|
inlinestaticconstexpr |
Definition at line 31 of file CPosePDFGaussian.h.
◆ getCovariance() [1/3]
|
inlineinherited |
Returns the estimate of the covariance matrix (STATE_LEN x STATE_LEN covariance matrix)
- See also
- getMean, getInformationMatrix
Definition at line 101 of file CProbabilityDensityFunction.h.
◆ getCovariance() [2/3]
|
inlineinherited |
Returns the estimate of the covariance matrix (STATE_LEN x STATE_LEN covariance matrix)
- See also
- getMean, getCovarianceAndMean, getInformationMatrix
Definition at line 78 of file CProbabilityDensityFunction.h.
◆ getCovariance() [3/3]
|
inlineinherited |
Returns the estimate of the covariance matrix (STATE_LEN x STATE_LEN covariance matrix)
- See also
- getMean, getCovarianceAndMean, getInformationMatrix
Definition at line 88 of file CProbabilityDensityFunction.h.
◆ getCovarianceAndMean() [1/2]
|
inlineoverride |
Returns an estimate of the pose covariance matrix (3x3 cov matrix) and the mean, both at once.
- See also
- getMean
Definition at line 78 of file CPosePDFGaussian.h.
◆ getCovarianceAndMean() [2/2]
|
pure virtualinherited |
Returns an estimate of the pose covariance matrix (STATE_LENxSTATE_LEN cov matrix) and the mean, both at once.
- See also
- getMean, getInformationMatrix
◆ getCovarianceDynAndMean()
|
inlineinherited |
Returns an estimate of the pose covariance matrix (STATE_LENxSTATE_LEN cov matrix) and the mean, both at once.
- See also
- getMean, getInformationMatrix
Definition at line 54 of file CProbabilityDensityFunction.h.
◆ getCovarianceEntropy()
|
inlineinherited |
Compute the entropy of the estimated covariance matrix.
Definition at line 168 of file CProbabilityDensityFunction.h.
◆ getInformationMatrix()
|
inlinevirtualinherited |
Returns the information (inverse covariance) matrix (a STATE_LEN x STATE_LEN matrix) Unless reimplemented in derived classes, this method first reads the covariance, then invert it.
- See also
- getMean, getCovarianceAndMean
Definition at line 124 of file CProbabilityDensityFunction.h.
◆ getMean() [1/2]
|
pure virtualinherited |
Returns the mean, or mathematical expectation of the probability density distribution (PDF).
- See also
- getCovarianceAndMean, getInformationMatrix
◆ getMean() [2/2]
Returns an estimate of the pose, (the mean, or mathematical expectation of the PDF).
- See also
- getCovariance
Definition at line 73 of file CPosePDFGaussian.h.
References mean.
◆ getMeanVal()
|
inlineinherited |
Returns the mean, or mathematical expectation of the probability density distribution (PDF).
- See also
- getCovariance, getInformationMatrix
Definition at line 67 of file CProbabilityDensityFunction.h.
◆ getPoseMean() [1/2]
|
inline |
Definition at line 51 of file CPosePDFGaussian.h.
References mean.
◆ getPoseMean() [2/2]
|
inline |
Definition at line 50 of file CPosePDFGaussian.h.
References mean.
◆ GetRuntimeClass()
|
overridevirtual |
Returns information about the class of an object in runtime.
Reimplemented from mrpt::poses::CPosePDF.
◆ GetRuntimeClassIdStatic()
|
static |
◆ inverse()
Returns a new PDF such as: NEW_PDF = (0,0,0) - THIS_PDF.
Implements mrpt::poses::CPosePDF.
Definition at line 276 of file CPosePDFGaussian.cpp.
References ASSERT_, CLASS_ID, cov, mrpt::poses::CPosePDF::GetRuntimeClass(), mean, MRPT_MAX_ALIGN_BYTES, mrpt::poses::CPose2D::phi(), mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::x(), and mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::y().
Referenced by PosePDFGaussTests::testPoseInverse().
◆ inverseComposition() [1/2]
| void CPosePDFGaussian::inverseComposition | ( | const CPosePDFGaussian & | x, |
| const CPosePDFGaussian & | ref | ||
| ) |
Set , computing the mean using the "-" operator and the covariances through the corresponding Jacobians (For 'x0' and 'x1' being independent variables!).
Definition at line 410 of file CPosePDFGaussian.cpp.
References cov, mean, mrpt::poses::CPose2D::phi(), mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::x(), and mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::y().
Referenced by mrpt::poses::CPosePDFGaussianInf::inverseComposition(), and operator-=().
◆ inverseComposition() [2/2]
| void CPosePDFGaussian::inverseComposition | ( | const CPosePDFGaussian & | x1, |
| const CPosePDFGaussian & | x0, | ||
| const mrpt::math::CMatrixDouble33 & | COV_01 | ||
| ) |
Set , computing the mean using the "-" operator and the covariances through the corresponding Jacobians (Given the 3x3 cross-covariance matrix of variables x0 and x1).
Definition at line 455 of file CPosePDFGaussian.cpp.
References cov, mean, mrpt::poses::CPose2D::phi(), mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::x(), and mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::y().
◆ is_3D()
|
inlinestaticconstexprinherited |
Definition at line 99 of file CPosePDF.h.
References mrpt::poses::CPosePDF::is_3D_val.
◆ is_PDF()
|
inlinestaticconstexprinherited |
Definition at line 104 of file CPosePDF.h.
References mrpt::poses::CPosePDF::is_PDF_val.
◆ isInfType()
|
inlinevirtualinherited |
Returns whether the class instance holds the uncertainty in covariance or information form.
- Note
- By default this is going to be covariance form. *Inf classes (e.g. CPosePDFGaussianInf) store it in information form.
- See also
- mrpt::traits::is_inf_type
Reimplemented in mrpt::poses::CPosePDFGaussianInf.
Definition at line 117 of file CProbabilityDensityFunction.h.
◆ jacobiansPoseComposition() [1/2]
|
staticinherited |
This static method computes the pose composition Jacobians, with these formulas:
Definition at line 32 of file CPosePDF.cpp.
References mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::x(), and mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::y().
Referenced by composePoint(), mrpt::poses::CPosePDF::jacobiansPoseComposition(), operator+=(), and mrpt::poses::CPosePDFGaussianInf::operator+=().
◆ jacobiansPoseComposition() [2/2]
|
staticinherited |
This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts.
Definition at line 22 of file CPosePDF.cpp.
References mrpt::poses::CPosePDF::jacobiansPoseComposition().
◆ mahalanobisDistanceTo()
| double CPosePDFGaussian::mahalanobisDistanceTo | ( | const CPosePDFGaussian & | theOther | ) |
Computes the Mahalanobis distance between the centers of two Gaussians.
Definition at line 346 of file CPosePDFGaussian.cpp.
References cov, mean, MRPT_END, MRPT_START, mrpt::math::multiply_HCHt_scalar(), mrpt::math::UNINITIALIZED_MATRIX, and mrpt::math::wrapToPiInPlace().
Referenced by mrpt::slam::CGridMapAligner::AlignPDF_robustMatch().
◆ operator delete() [1/3]
Definition at line 31 of file CPosePDFGaussian.h.
◆ operator delete() [2/3]
Definition at line 31 of file CPosePDFGaussian.h.
◆ operator delete() [3/3]
|
inlinenoexcept |
Definition at line 31 of file CPosePDFGaussian.h.
◆ operator delete[]()
Definition at line 31 of file CPosePDFGaussian.h.
◆ operator new() [1/3]
|
inline |
Definition at line 31 of file CPosePDFGaussian.h.
◆ operator new() [2/3]
|
inlinenoexcept |
Definition at line 31 of file CPosePDFGaussian.h.
◆ operator new() [3/3]
Definition at line 31 of file CPosePDFGaussian.h.
◆ operator new[]()
|
inline |
Definition at line 31 of file CPosePDFGaussian.h.
◆ operator+=() [1/2]
Makes: thisPDF = thisPDF + Ap, where "+" is pose composition (both the mean, and the covariance matrix are updated).
Definition at line 302 of file CPosePDFGaussian.cpp.
References mean, mrpt::poses::CPose2D::phi(), and rotateCov().
◆ operator+=() [2/2]
| void CPosePDFGaussian::operator+= | ( | const CPosePDFGaussian & | Ap | ) |
Makes: thisPDF = thisPDF + Ap, where "+" is pose composition (both the mean, and the covariance matrix are updated) (see formulas in jacobiansPoseComposition ).
Definition at line 503 of file CPosePDFGaussian.cpp.
References cov, mrpt::poses::CPosePDF::jacobiansPoseComposition(), mean, and mrpt::math::UNINITIALIZED_MATRIX.
◆ operator-=()
|
inline |
Makes: thisPDF = thisPDF - Ap, where "-" is pose inverse composition (both the mean, and the covariance matrix are updated)
Definition at line 188 of file CPosePDFGaussian.h.
References inverseComposition().
◆ rotateCov()
| void CPosePDFGaussian::rotateCov | ( | const double | ang | ) |
Rotate the covariance matrix by replacing it by , where .
Definition at line 172 of file CPosePDFGaussian.cpp.
References cov, and MRPT_MAX_ALIGN_BYTES.
Referenced by changeCoordinatesReference(), mrpt::slam::CRangeBearingKFSLAM2D::OnTransitionNoise(), and operator+=().
◆ saveToTextFile()
|
overridevirtual |
Save PDF's particles to a text file, containing the 2D pose in the first line, then the covariance matrix in next 3 lines.
Implements mrpt::math::CProbabilityDensityFunction< CPose2D, 3 >.
Definition at line 127 of file CPosePDFGaussian.cpp.
References cov, mrpt::system::os::fclose(), mrpt::system::os::fopen(), mrpt::system::os::fprintf(), mean, mrpt::poses::CPose2D::phi(), mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::x(), and mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::y().
◆ serializeFrom()
|
overrideprotectedvirtual |
Pure virtual method for reading (deserializing) from an abstract archive.
Users don't call this method directly. Instead, use stream >> object;.
- Parameters
-
in The input binary stream where the object data must read from. version The version of the object stored in the stream: use this version number in your code to know how to read the incoming data.
- Exceptions
-
std::exception On any I/O error
Implements mrpt::serialization::CSerializable.
Definition at line 64 of file CPosePDFGaussian.cpp.
References cov, mrpt::math::deserializeSymmetricMatrixFrom(), mean, and MRPT_THROW_UNKNOWN_SERIALIZATION_VERSION.
◆ serializeGetVersion()
|
overrideprotectedvirtual |
Must return the current versioning number of the object.
Start in zero for new classes, and increments each time there is a change in the stored format.
Implements mrpt::serialization::CSerializable.
Definition at line 58 of file CPosePDFGaussian.cpp.
◆ serializeTo()
|
overrideprotectedvirtual |
Pure virtual method for writing (serializing) to an abstract archive.
Users don't call this method directly. Instead, use stream << object;.
- Exceptions
-
std::exception On any I/O error
Implements mrpt::serialization::CSerializable.
Definition at line 59 of file CPosePDFGaussian.cpp.
References cov, mean, and mrpt::math::serializeSymmetricMatrixTo().
◆ writeToMatlab()
|
inlinevirtualinherited |
Introduces a pure virtual method responsible for writing to a mxArray Matlab object, typically a MATLAB struct whose contents are documented in each derived class.
- Returns
- A new
mxArray(caller is responsible of memory freeing) or nullptr is class does not support conversion to MATLAB.
Definition at line 68 of file CSerializable.h.
Member Data Documentation
◆ _init_CPosePDFGaussian
|
staticprotected |
Definition at line 31 of file CPosePDFGaussian.h.
◆ className
|
staticconstexpr |
Definition at line 31 of file CPosePDFGaussian.h.
◆ cov
| mrpt::math::CMatrixDouble33 mrpt::poses::CPosePDFGaussian::cov |
The 3x3 covariance matrix.
Definition at line 46 of file CPosePDFGaussian.h.
Referenced by mrpt::slam::CGridMapAligner::AlignPDF_robustMatch(), assureMinCovariance(), assureSymmetry(), bayesianFusion(), mrpt::poses::CPosePDFSOG::bayesianFusion(), composePoint(), mrpt::obs::CActionRobotMovement2D::computeFromOdometry_modelGaussian(), copyFrom(), mrpt::poses::CPosePDFParticles::copyFrom(), mrpt::poses::CPose3DPDFGaussian::CPose3DPDFGaussian(), CPosePDFGaussian(), drawManySamples(), drawSingleSample(), evaluateNormalizedPDF(), evaluatePDF(), getCovarianceAndMean(), mrpt::slam::CMetricMapBuilderICP::getCurrentPoseEstimation(), mrpt::slam::CRangeBearingKFSLAM2D::getCurrentRobotPose(), mrpt::slam::CRangeBearingKFSLAM2D::getCurrentState(), mrpt::poses::CPoseRandomSampler::getOriginalPDFCov2D(), inverse(), inverseComposition(), mrpt::poses::CPosePDFGaussianInf::inverseComposition(), mrpt::maps::COccupancyGridMap2D::laserScanSimulatorWithUncertainty(), mahalanobisDistanceTo(), mrpt::slam::CRangeBearingKFSLAM2D::OnTransitionNoise(), operator+=(), mrpt::poses::operator==(), mrpt::obs::CActionRobotMovement2D::prepareFastDrawSingleSample_modelGaussian(), mrpt::slam::CMetricMapBuilderICP::processObservation(), ransac_data_assoc_run(), rotateCov(), saveToTextFile(), mrpt::tfest::se2_l2(), mrpt::tfest::se2_l2_robust(), serializeFrom(), serializeTo(), mrpt::poses::CPoseRandomSampler::setPosePDF(), and PosePDFGaussTests::testPoseInverse().
◆ mean
| CPose2D mrpt::poses::CPosePDFGaussian::mean |
The mean value.
Definition at line 44 of file CPosePDFGaussian.h.
Referenced by mrpt::slam::CGridMapAligner::AlignPDF_robustMatch(), bayesianFusion(), mrpt::poses::CPosePDFSOG::bayesianFusion(), changeCoordinatesReference(), composePoint(), mrpt::obs::CActionRobotMovement2D::computeFromOdometry_modelGaussian(), copyFrom(), mrpt::poses::CPosePDFParticles::copyFrom(), drawManySamples(), drawSingleSample(), evaluateNormalizedPDF(), evaluatePDF(), getCovarianceAndMean(), mrpt::slam::CMetricMapBuilderICP::getCurrentPoseEstimation(), mrpt::slam::CRangeBearingKFSLAM2D::getCurrentRobotPose(), mrpt::slam::CRangeBearingKFSLAM2D::getCurrentState(), getMean(), getPoseMean(), mrpt::slam::CICP::ICP_Method_Classic(), mrpt::slam::CICP::ICP_Method_LM(), inverse(), inverseComposition(), mrpt::poses::CPosePDFGaussianInf::inverseComposition(), mrpt::maps::COccupancyGridMap2D::laserScanSimulatorWithUncertainty(), mahalanobisDistanceTo(), operator+=(), mrpt::poses::operator==(), mrpt::maps::CMultiMetricMapPDF::prediction_and_update_pfOptimalProposal(), mrpt::obs::CActionRobotMovement2D::prepareFastDrawSingleSample_modelGaussian(), mrpt::slam::CMetricMapBuilderICP::processObservation(), ransac_data_assoc_run(), saveToTextFile(), mrpt::tfest::se2_l2(), mrpt::tfest::se2_l2_robust(), serializeFrom(), serializeTo(), mrpt::poses::CPoseRandomSampler::setPosePDF(), and PosePDFGaussTests::testPoseInverse().
◆ runtimeClassId
|
staticprotected |
Definition at line 31 of file CPosePDFGaussian.h.
◆ state_length
|
staticconstexprinherited |
The length of the variable, for example, 3 for a 3D point, 6 for a 3D pose (x y z yaw pitch roll).
Definition at line 31 of file CProbabilityDensityFunction.h.