Detailed Description
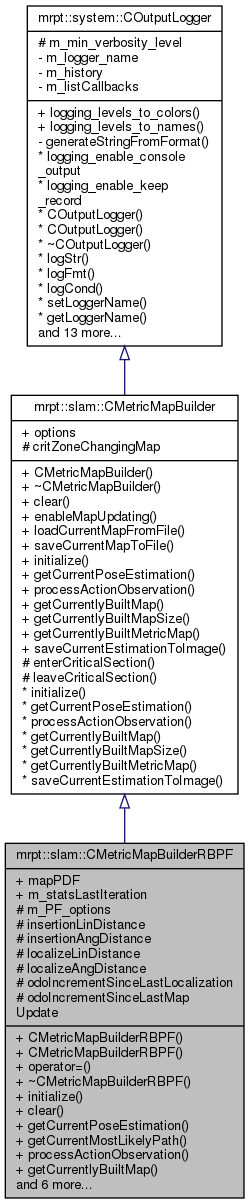
This class implements a Rao-Blackwelized Particle Filter (RBPF) approach to map building (SLAM).
Internally, the list of particles, each containing a hypothesis for the robot path plus its associated metric map, is stored in an object of class CMultiMetricMapPDF.
This class processes robot actions and observations sequentially (through the method CMetricMapBuilderRBPF::processActionObservation) and exploits the generic design of metric map classes in MRPT to deal with any number and combination of maps simultaneously: the likelihood of observations is the product of the likelihood in the different maps, etc.
A number of particle filter methods are implemented as well, by selecting the appropriate values in TConstructionOptions::PF_options. Not all the PF algorithms are implemented for all kinds of maps.
For an example of usage, check the application "rbpf-slam", in "apps/RBPF-SLAM". See also the wiki page.
- Note
- Since MRPT 0.7.2, the new variables "localizeLinDistance,localizeAngDistance" are introduced to provide a way to update the robot pose at a different rate than the map is updated.
- Since MRPT 0.7.1 the semantics of the parameters "insertionLinDistance" and "insertionAngDistance" changes: the entire RBFP is now NOT updated unless odometry increments surpass the threshold (previously, only the map was NOT updated). This is done to gain efficiency.
- Since MRPT 0.6.2 this class implements full 6D SLAM. Previous versions worked in 2D + heading only.
- See also
- CMetricMap
Definition at line 56 of file CMetricMapBuilderRBPF.h.
#include <mrpt/slam/CMetricMapBuilderRBPF.h>
Classes | |
| struct | TConstructionOptions |
| Options for building a CMetricMapBuilderRBPF object, passed to the constructor. More... | |
| struct | TStats |
| This structure will hold stats after each execution of processActionObservation. More... | |
Public Member Functions | |
| CMetricMapBuilderRBPF (const TConstructionOptions &initializationOptions) | |
| Constructor. More... | |
| CMetricMapBuilderRBPF () | |
| This second constructor is created for the situation where a class member needs to be of type CMetricMapBuilderRBPF. More... | |
| CMetricMapBuilderRBPF & | operator= (const CMetricMapBuilderRBPF &src) |
| Copy Operator. More... | |
| virtual | ~CMetricMapBuilderRBPF () |
| Destructor. More... | |
| void | initialize (const mrpt::maps::CSimpleMap &initialMap=mrpt::maps::CSimpleMap(), const mrpt::poses::CPosePDF *x0=nullptr) |
| Initialize the method, starting with a known location PDF "x0"(if supplied, set to nullptr to left unmodified) and a given fixed, past map. More... | |
| void | clear () |
| Clear all elements of the maps. More... | |
| mrpt::poses::CPose3DPDF::Ptr | getCurrentPoseEstimation () const |
| Returns a copy of the current best pose estimation as a pose PDF. More... | |
| void | getCurrentMostLikelyPath (std::deque< mrpt::math::TPose3D > &outPath) const |
| Returns the current most-likely path estimation (the path associated to the most likely particle). More... | |
| void | processActionObservation (mrpt::obs::CActionCollection &action, mrpt::obs::CSensoryFrame &observations) |
| Appends a new action and observations to update this map: See the description of the class at the top of this page to see a more complete description. More... | |
| void | getCurrentlyBuiltMap (mrpt::maps::CSimpleMap &out_map) const |
| Fills "out_map" with the set of "poses"-"sensory-frames", thus the so far built map. More... | |
| const mrpt::maps::CMultiMetricMap * | getCurrentlyBuiltMetricMap () const |
| Returns the map built so far. More... | |
| unsigned int | getCurrentlyBuiltMapSize () |
| Returns just how many sensory-frames are stored in the currently build map. More... | |
| void | saveCurrentEstimationToImage (const std::string &file, bool formatEMF_BMP=true) |
| A useful method for debugging: the current map (and/or poses) estimation is dumped to an image file. More... | |
| void | drawCurrentEstimationToImage (mrpt::img::CCanvas *img) |
| A useful method for debugging: draws the current map and path hypotheses to a CCanvas. More... | |
| void | saveCurrentPathEstimationToTextFile (const std::string &fil) |
| A logging utility: saves the current path estimation for each particle in a text file (a row per particle, each 3-column-entry is a set [x,y,phi], respectively). More... | |
| double | getCurrentJointEntropy () |
| void | enableMapUpdating (bool enable) |
| Enables or disables the map updating (default state is enabled) More... | |
| void | loadCurrentMapFromFile (const std::string &fileName) |
| Load map (mrpt::maps::CSimpleMap) from a ".simplemap" file. More... | |
| void | saveCurrentMapToFile (const std::string &fileName, bool compressGZ=true) const |
| Save map (mrpt::maps::CSimpleMap) to a ".simplemap" file. More... | |
Static Public Member Functions | |
| static std::array< mrpt::system::TConsoleColor, NUMBER_OF_VERBOSITY_LEVELS > & | logging_levels_to_colors () |
| Map from VerbosityLevels to their corresponding mrpt::system::TConsoleColor. More... | |
| static std::array< std::string, NUMBER_OF_VERBOSITY_LEVELS > & | logging_levels_to_names () |
| Map from VerbosityLevels to their corresponding names. More... | |
Public Attributes | |
| mrpt::maps::CMultiMetricMapPDF | mapPDF |
| The map PDF: It includes a path and associated map for each particle. More... | |
| TStats | m_statsLastIteration |
| This structure will hold stats after each execution of processActionObservation. More... | |
| TOptions | options |
Protected Member Functions | |
| void | enterCriticalSection () |
| Enter critical section for map updating. More... | |
| void | leaveCriticalSection () |
| Leave critical section for map updating. More... | |
Protected Attributes | |
| bayes::CParticleFilter::TParticleFilterOptions | m_PF_options |
| The configuration of the particle filter. More... | |
| float | insertionLinDistance |
| Distances (linear and angular) for inserting a new observation into the map. More... | |
| float | insertionAngDistance |
| float | localizeLinDistance |
| Distances (linear and angular) for updating the robot pose estimate (and particles weighs, if applicable). More... | |
| float | localizeAngDistance |
| mrpt::poses::CPose3DPDFGaussian | odoIncrementSinceLastLocalization |
| Traveled distance since last localization update. More... | |
| mrpt::poses::CPose3D | odoIncrementSinceLastMapUpdate |
| Traveled distance since last map update. More... | |
| std::mutex | critZoneChangingMap |
| Critical zones. More... | |
| VerbosityLevel | m_min_verbosity_level |
| Provided messages with VerbosityLevel smaller than this value shall be ignored. More... | |
Logging methods | |
| bool | logging_enable_console_output |
| [Default=true] Set it to false in case you don't want the logged messages to be dumped to the output automatically. More... | |
| bool | logging_enable_keep_record |
| [Default=false] Enables storing all messages into an internal list. More... | |
| void | logStr (const VerbosityLevel level, const std::string &msg_str) const |
| Main method to add the specified message string to the logger. More... | |
| void | logFmt (const VerbosityLevel level, const char *fmt,...) const MRPT_printf_format_check(3 |
| Alternative logging method, which mimics the printf behavior. More... | |
| void void | logCond (const VerbosityLevel level, bool cond, const std::string &msg_str) const |
| Log the given message only if the condition is satisfied. More... | |
| void | setLoggerName (const std::string &name) |
| Set the name of the COutputLogger instance. More... | |
| std::string | getLoggerName () const |
| Return the name of the COutputLogger instance. More... | |
| void | setMinLoggingLevel (const VerbosityLevel level) |
| Set the minimum logging level for which the incoming logs are going to be taken into account. More... | |
| void | setVerbosityLevel (const VerbosityLevel level) |
| alias of setMinLoggingLevel() More... | |
| VerbosityLevel | getMinLoggingLevel () const |
| bool | isLoggingLevelVisible (VerbosityLevel level) const |
| void | getLogAsString (std::string &log_contents) const |
| Fill the provided string with the contents of the logger's history in std::string representation. More... | |
| std::string | getLogAsString () const |
| Get the history of COutputLogger instance in a string representation. More... | |
| void | writeLogToFile (const std::string *fname_in=NULL) const |
| Write the contents of the COutputLogger instance to an external file. More... | |
| void | dumpLogToConsole () const |
| Dump the current contents of the COutputLogger instance in the terminal window. More... | |
| std::string | getLoggerLastMsg () const |
| Return the last Tmsg instance registered in the logger history. More... | |
| void | getLoggerLastMsg (std::string &msg_str) const |
| Fill inputtted string with the contents of the last message in history. More... | |
| void | loggerReset () |
| Reset the contents of the logger instance. More... | |
| void | logRegisterCallback (output_logger_callback_t userFunc) |
| bool | logDeregisterCallback (output_logger_callback_t userFunc) |
Constructor & Destructor Documentation
◆ CMetricMapBuilderRBPF() [1/2]
| CMetricMapBuilderRBPF::CMetricMapBuilderRBPF | ( | const TConstructionOptions & | initializationOptions | ) |
Constructor.
Definition at line 30 of file CMetricMapBuilderRBPF.cpp.
References clear(), mrpt::system::COutputLogger::setLoggerName(), mrpt::system::COutputLogger::setVerbosityLevel(), and mrpt::slam::CMetricMapBuilderRBPF::TConstructionOptions::verbosity_level.
◆ CMetricMapBuilderRBPF() [2/2]
| CMetricMapBuilderRBPF::CMetricMapBuilderRBPF | ( | ) |
This second constructor is created for the situation where a class member needs to be of type CMetricMapBuilderRBPF.
Definition at line 50 of file CMetricMapBuilderRBPF.cpp.
References MRPT_LOG_WARN, and mrpt::system::COutputLogger::setLoggerName().
◆ ~CMetricMapBuilderRBPF()
|
virtual |
Destructor.
Definition at line 81 of file CMetricMapBuilderRBPF.cpp.
Member Function Documentation
◆ clear()
| void CMetricMapBuilderRBPF::clear | ( | ) |
Clear all elements of the maps.
Definition at line 85 of file CMetricMapBuilderRBPF.cpp.
References mrpt::maps::CMultiMetricMapPDF::clear(), mrpt::slam::CMetricMapBuilder::critZoneChangingMap, mapPDF, MRPT_LOG_DEBUG, odoIncrementSinceLastLocalization, odoIncrementSinceLastMapUpdate, and mrpt::poses::CPose3D::setFromValues().
Referenced by CMetricMapBuilderRBPF(), and initialize().
◆ drawCurrentEstimationToImage()
| void CMetricMapBuilderRBPF::drawCurrentEstimationToImage | ( | mrpt::img::CCanvas * | img | ) |
A useful method for debugging: draws the current map and path hypotheses to a CCanvas.
Definition at line 379 of file CMetricMapBuilderRBPF.cpp.
References ASSERT_, mrpt::img::CCanvas::drawImage(), mrpt::maps::CMultiMetricMapPDF::getCurrentMostLikelyMetricMap(), mrpt::img::CImage::getHeight(), mrpt::maps::CMultiMetricMapPDF::getPath(), mrpt::bayes::CParticleFilterDataImpl< Derived, particle_list_t >::getW(), mapPDF, MRPT_END, MRPT_START, mrpt::bayes::CParticleFilterDataImpl< Derived, particle_list_t >::particlesCount(), mrpt::img::CImage::resize(), and mrpt::round().
Referenced by saveCurrentEstimationToImage().
◆ dumpLogToConsole()
|
inherited |
Dump the current contents of the COutputLogger instance in the terminal window.
- See also
- writeToFile
Definition at line 190 of file COutputLogger.cpp.
◆ enableMapUpdating()
|
inlineinherited |
Enables or disables the map updating (default state is enabled)
Definition at line 104 of file CMetricMapBuilder.h.
References mrpt::slam::CMetricMapBuilder::TOptions::enableMapUpdating, and mrpt::slam::CMetricMapBuilder::options.
◆ enterCriticalSection()
|
inlineprotectedinherited |
Enter critical section for map updating.
Definition at line 39 of file CMetricMapBuilder.h.
References mrpt::slam::CMetricMapBuilder::critZoneChangingMap.
Referenced by mrpt::slam::CMetricMapBuilderICP::getCurrentMapPoints(), and mrpt::slam::CMetricMapBuilderICP::~CMetricMapBuilderICP().
◆ getCurrentJointEntropy()
| double CMetricMapBuilderRBPF::getCurrentJointEntropy | ( | ) |
Definition at line 505 of file CMetricMapBuilderRBPF.cpp.
References mrpt::maps::CMultiMetricMapPDF::getCurrentJointEntropy(), and mapPDF.
◆ getCurrentlyBuiltMap()
|
virtual |
Fills "out_map" with the set of "poses"-"sensory-frames", thus the so far built map.
Implements mrpt::slam::CMetricMapBuilder.
Definition at line 359 of file CMetricMapBuilderRBPF.cpp.
References mapPDF, mrpt::maps::CMultiMetricMapPDF::SFs, and mrpt::maps::CMultiMetricMapPDF::updateSensoryFrameSequence().
◆ getCurrentlyBuiltMapSize()
|
virtual |
Returns just how many sensory-frames are stored in the currently build map.
Implements mrpt::slam::CMetricMapBuilder.
Definition at line 374 of file CMetricMapBuilderRBPF.cpp.
References mapPDF, mrpt::maps::CMultiMetricMapPDF::SFs, and mrpt::maps::CSimpleMap::size().
◆ getCurrentlyBuiltMetricMap()
|
virtual |
Returns the map built so far.
NOTE that for efficiency a pointer to the internal object is passed, DO NOT delete nor modify the object in any way, if desired, make a copy of ir with "clone()".
Implements mrpt::slam::CMetricMapBuilder.
Definition at line 366 of file CMetricMapBuilderRBPF.cpp.
References mrpt::maps::CMultiMetricMapPDF::getCurrentMostLikelyMetricMap(), and mapPDF.
◆ getCurrentMostLikelyPath()
| void CMetricMapBuilderRBPF::getCurrentMostLikelyPath | ( | std::deque< mrpt::math::TPose3D > & | outPath | ) | const |
Returns the current most-likely path estimation (the path associated to the most likely particle).
Definition at line 338 of file CMetricMapBuilderRBPF.cpp.
References mrpt::maps::CMultiMetricMapPDF::getPath(), mrpt::bayes::CParticleFilterDataImpl< Derived, particle_list_t >::getW(), mapPDF, and mrpt::bayes::CParticleFilterDataImpl< Derived, particle_list_t >::particlesCount().
◆ getCurrentPoseEstimation()
|
virtual |
Returns a copy of the current best pose estimation as a pose PDF.
Implements mrpt::slam::CMetricMapBuilder.
Definition at line 319 of file CMetricMapBuilderRBPF.cpp.
References mrpt::poses::CPose3D::asTPose(), mrpt::maps::CMultiMetricMapPDF::getEstimatedPosePDF(), mapPDF, mrpt::poses::CPose3DPDFGaussian::mean, and odoIncrementSinceLastLocalization.
◆ getLogAsString() [1/2]
|
inherited |
Fill the provided string with the contents of the logger's history in std::string representation.
Definition at line 154 of file COutputLogger.cpp.
◆ getLogAsString() [2/2]
|
inherited |
Get the history of COutputLogger instance in a string representation.
Definition at line 159 of file COutputLogger.cpp.
Referenced by mrpt::graphslam::deciders::CICPCriteriaNRD< GRAPH_T >::getDescriptiveReport().
◆ getLoggerLastMsg() [1/2]
|
inherited |
Return the last Tmsg instance registered in the logger history.
Definition at line 195 of file COutputLogger.cpp.
References mrpt::system::COutputLogger::TMsg::getAsString().
◆ getLoggerLastMsg() [2/2]
|
inherited |
Fill inputtted string with the contents of the last message in history.
Definition at line 201 of file COutputLogger.cpp.
◆ getLoggerName()
|
inherited |
Return the name of the COutputLogger instance.
- See also
- setLoggerName
Definition at line 143 of file COutputLogger.cpp.
◆ getMinLoggingLevel()
|
inlineinherited |
- See also
- setMinLoggingLevel
Definition at line 200 of file system/COutputLogger.h.
References mrpt::system::COutputLogger::m_min_verbosity_level.
Referenced by mrpt::maps::CRandomFieldGridMap2D::isEnabledVerbose(), and processActionObservation().
◆ initialize()
|
virtual |
Initialize the method, starting with a known location PDF "x0"(if supplied, set to nullptr to left unmodified) and a given fixed, past map.
Implements mrpt::slam::CMetricMapBuilder.
Definition at line 288 of file CMetricMapBuilderRBPF.cpp.
References clear(), mrpt::maps::CMultiMetricMapPDF::clear(), mrpt::slam::CMetricMapBuilder::critZoneChangingMap, mrpt::maps::CSimpleMap::empty(), mrpt::math::CProbabilityDensityFunction< TDATA, STATE_LEN >::getMeanVal(), mapPDF, MRPT_LOG_INFO_STREAM, mrpt::maps::CSimpleMap::rbegin(), and mrpt::maps::CSimpleMap::size().
◆ isLoggingLevelVisible()
|
inlineinherited |
Definition at line 201 of file system/COutputLogger.h.
References mrpt::system::COutputLogger::m_min_verbosity_level.
Referenced by processActionObservation(), and mrpt::system::COutputLoggerStreamWrapper::~COutputLoggerStreamWrapper().
◆ leaveCriticalSection()
|
inlineprotectedinherited |
Leave critical section for map updating.
Definition at line 41 of file CMetricMapBuilder.h.
References mrpt::slam::CMetricMapBuilder::critZoneChangingMap.
Referenced by mrpt::slam::CMetricMapBuilderICP::getCurrentMapPoints(), and mrpt::slam::CMetricMapBuilderICP::~CMetricMapBuilderICP().
◆ loadCurrentMapFromFile()
|
inherited |
Load map (mrpt::maps::CSimpleMap) from a ".simplemap" file.
Definition at line 56 of file CMetricMapBuilder.cpp.
References mrpt::serialization::archiveFrom(), mrpt::maps::CSimpleMap::clear(), mrpt::system::fileExists(), mrpt::slam::CMetricMapBuilder::initialize(), MRPT_LOG_INFO_STREAM, and MRPT_LOG_WARN_STREAM.
Referenced by mrpt::slam::CMetricMapBuilderICP::setCurrentMapFile().
◆ logCond()
|
inherited |
Log the given message only if the condition is satisfied.
- See also
- log, logFmt
Definition at line 131 of file COutputLogger.cpp.
◆ logDeregisterCallback()
|
inherited |
- Returns
- true if an entry was found and deleted.
Definition at line 290 of file COutputLogger.cpp.
References getAddress(), and mrpt::system::COutputLogger::m_listCallbacks.
◆ logFmt()
|
inherited |
Alternative logging method, which mimics the printf behavior.
Handy for not having to first use mrpt::format to pass a std::string message to logStr
Definition at line 91 of file COutputLogger.cpp.
Referenced by mrpt::graphslam::deciders::CICPCriteriaNRD< GRAPH_T >::CICPCriteriaNRD(), mrpt::hmtslam::CTopLCDetector_GridMatching::computeTopologicalObservationModel(), CGraphSlamHandler< GRAPH_T >::execute(), mrpt::math::CLevenbergMarquardtTempl< VECTORTYPE, USERPARAM >::execute(), CGraphSlamHandler< GRAPH_T >::initOutputDir(), CGraphSlamHandler< GRAPH_T >::initVisualization(), mrpt::nav::CNavigatorManualSequence::navigationStep(), mrpt::nav::CAbstractNavigator::performNavigationStepNavigating(), CGraphSlamHandler< GRAPH_T >::readConfigFname(), CGraphSlamHandler< GRAPH_T >::saveResults(), CGraphSlamHandler< GRAPH_T >::setResultsDirName(), mrpt::nav::CReactiveNavigationSystem::STEP1_InitPTGs(), and CGraphSlamHandler< GRAPH_T >::~CGraphSlamHandler().
◆ loggerReset()
|
inherited |
Reset the contents of the logger instance.
Called upon construction.
Definition at line 206 of file COutputLogger.cpp.
References mrpt::system::LVL_INFO.
◆ logging_levels_to_colors()
|
staticinherited |
Map from VerbosityLevels to their corresponding mrpt::system::TConsoleColor.
Handy for coloring the input based on the verbosity of the message
Definition at line 47 of file COutputLogger.cpp.
References logging_levels_to_colors.
Referenced by mrpt::system::COutputLogger::TMsg::dumpToConsole().
◆ logging_levels_to_names()
|
staticinherited |
Map from VerbosityLevels to their corresponding names.
Handy for printing the current message VerbosityLevel along with the actual content
Definition at line 60 of file COutputLogger.cpp.
References logging_levels_to_names.
Referenced by mrpt::system::COutputLogger::TMsg::getAsString().
◆ logRegisterCallback()
|
inherited |
Definition at line 277 of file COutputLogger.cpp.
References mrpt::system::COutputLogger::m_listCallbacks.
◆ logStr()
|
inherited |
Main method to add the specified message string to the logger.
Definition at line 72 of file COutputLogger.cpp.
References mrpt::system::COutputLogger::TMsg::body, mrpt::system::COutputLogger::TMsg::dumpToConsole(), mrpt::system::COutputLogger::TMsg::level, mrpt::system::COutputLogger::TMsg::name, and mrpt::system::COutputLogger::TMsg::timestamp.
Referenced by mrpt::slam::PF_implementation< mrpt::math::TPose3D, CMonteCarloLocalization3D, mrpt::bayes::particle_storage_mode::VALUE >::PF_SLAM_implementation_pfAuxiliaryPFStandardAndOptimal(), mrpt::nav::CReactiveNavigationSystem::STEP1_InitPTGs(), and mrpt::system::COutputLoggerStreamWrapper::~COutputLoggerStreamWrapper().
◆ operator=()
| CMetricMapBuilderRBPF & CMetricMapBuilderRBPF::operator= | ( | const CMetricMapBuilderRBPF & | src | ) |
Copy Operator.
Definition at line 59 of file CMetricMapBuilderRBPF.cpp.
References insertionAngDistance, insertionLinDistance, localizeAngDistance, localizeLinDistance, m_PF_options, m_statsLastIteration, mapPDF, odoIncrementSinceLastLocalization, and odoIncrementSinceLastMapUpdate.
◆ processActionObservation()
|
virtual |
Appends a new action and observations to update this map: See the description of the class at the top of this page to see a more complete description.
- Parameters
-
action The incremental 2D pose change in the robot pose. This value is deterministic. observations The set of observations that robot senses at the new pose. Statistics will be saved to statsLastIteration
Implements mrpt::slam::CMetricMapBuilder.
Definition at line 105 of file CMetricMapBuilderRBPF.cpp.
References mrpt::slam::CMetricMapBuilder::TOptions::alwaysInsertByClass, ASSERT_, mrpt::obs::CActionRobotMovement2D::computeFromOdometry(), mrpt::poses::CPose3DPDFGaussian::cov, mrpt::math::cov(), mrpt::slam::CMetricMapBuilder::critZoneChangingMap, mrpt::rtti::CListOfClasses::data, mrpt::slam::CMetricMapBuilder::TOptions::debugForceInsertion, mrpt::bayes::CParticleFilterDataImpl< Derived, particle_list_t >::ESS(), mrpt::obs::CActionRobotMovement3D::estimationMethod, mrpt::bayes::CParticleFilter::executeOn(), mrpt::format(), mrpt::obs::CActionCollection::getActionByClass(), mrpt::poses::CPose3DPDFParticles::getCovarianceAndMean(), mrpt::maps::CMultiMetricMapPDF::getEstimatedPosePDF(), mrpt::poses::CPose3DPDFParticles::getMean(), mrpt::system::COutputLogger::getMinLoggingLevel(), mrpt::obs::CActionCollection::insert(), insertionAngDistance, insertionLinDistance, mrpt::maps::CMultiMetricMapPDF::insertObservation(), mrpt::system::COutputLogger::isLoggingLevelVisible(), localizeAngDistance, localizeLinDistance, mrpt::system::LVL_INFO, mrpt::bayes::CParticleFilter::m_options, mrpt::bayes::CParticleFilterData< T, STORAGE >::m_particles, m_PF_options, m_statsLastIteration, mapPDF, mrpt::poses::CPose3DPDFGaussian::mean, MRPT_END, MRPT_LOG_DEBUG, MRPT_LOG_DEBUG_STREAM, MRPT_LOG_INFO, MRPT_LOG_INFO_STREAM, MRPT_LOG_WARN, MRPT_LOG_WARN_STREAM, MRPT_START, mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::norm(), mrpt::slam::CMetricMapBuilderRBPF::TStats::observationsInserted, odoIncrementSinceLastLocalization, odoIncrementSinceLastMapUpdate, mrpt::slam::CMetricMapBuilder::options, mrpt::obs::CActionRobotMovement3D::poseChange, mrpt::RAD2DEG(), mrpt::poses::CPose3D::setFromValues(), mrpt::system::COutputLogger::setVerbosityLevel(), mrpt::maps::CMultiMetricMapPDF::SFs, mrpt::maps::CSimpleMap::size(), mrpt::obs::CAction::timestamp, and mrpt::poses::CPose3D::yaw().
◆ saveCurrentEstimationToImage()
|
virtual |
A useful method for debugging: the current map (and/or poses) estimation is dumped to an image file.
- Parameters
-
file The output file name formatEMF_BMP Output format = true:EMF, false:BMP
Implements mrpt::slam::CMetricMapBuilder.
Definition at line 480 of file CMetricMapBuilderRBPF.cpp.
References CH_GRAY, drawCurrentEstimationToImage(), MRPT_END, and MRPT_START.
◆ saveCurrentMapToFile()
|
inherited |
Save map (mrpt::maps::CSimpleMap) to a ".simplemap" file.
Definition at line 88 of file CMetricMapBuilder.cpp.
References mrpt::serialization::archiveFrom(), mrpt::slam::CMetricMapBuilder::getCurrentlyBuiltMap(), and MRPT_LOG_INFO_STREAM.
Referenced by mrpt::slam::CMetricMapBuilderICP::setCurrentMapFile().
◆ saveCurrentPathEstimationToTextFile()
| void CMetricMapBuilderRBPF::saveCurrentPathEstimationToTextFile | ( | const std::string & | fil | ) |
A logging utility: saves the current path estimation for each particle in a text file (a row per particle, each 3-column-entry is a set [x,y,phi], respectively).
Definition at line 513 of file CMetricMapBuilderRBPF.cpp.
References mapPDF, and mrpt::maps::CMultiMetricMapPDF::saveCurrentPathEstimationToTextFile().
◆ setLoggerName()
|
inherited |
Set the name of the COutputLogger instance.
- See also
- getLoggerName
Definition at line 138 of file COutputLogger.cpp.
Referenced by mrpt::slam::CMetricMapBuilderICP::CMetricMapBuilderICP(), CMetricMapBuilderRBPF(), mrpt::slam::CMonteCarloLocalization2D::CMonteCarloLocalization2D(), mrpt::slam::CMonteCarloLocalization3D::CMonteCarloLocalization3D(), and mrpt::graphslam::CWindowManager::initCWindowManager().
◆ setMinLoggingLevel()
|
inherited |
Set the minimum logging level for which the incoming logs are going to be taken into account.
String messages with specified VerbosityLevel smaller than the min, will not be outputted to the screen and neither will a record of them be stored in by the COutputLogger instance
Definition at line 144 of file COutputLogger.cpp.
Referenced by mrpt::maps::CRandomFieldGridMap2D::enableVerbose(), mrpt::math::CLevenbergMarquardtTempl< VECTORTYPE, USERPARAM >::execute(), mrpt::hwdrivers::CHokuyoURG::initialize(), and mrpt::graphslam::deciders::CICPCriteriaNRD< GRAPH_T >::loadParams().
◆ setVerbosityLevel()
|
inherited |
alias of setMinLoggingLevel()
Definition at line 149 of file COutputLogger.cpp.
Referenced by mrpt::nav::CAbstractNavigator::CAbstractNavigator(), CMetricMapBuilderRBPF(), mrpt::comms::CServerTCPSocket::CServerTCPSocket(), processActionObservation(), and mrpt::math::ransac_detect_2D_lines().
◆ writeLogToFile()
|
inherited |
Write the contents of the COutputLogger instance to an external file.
Upon call to this method, COutputLogger dumps the contents of all the logged commands so far to the specified external file. By default the filename is set to ${LOGGERNAME}.log except if the fname parameter is provided
- See also
- dumpToConsole, getAsString
Definition at line 165 of file COutputLogger.cpp.
References ASSERTMSG_, and mrpt::format().
Member Data Documentation
◆ critZoneChangingMap
|
protectedinherited |
Critical zones.
Definition at line 37 of file CMetricMapBuilder.h.
Referenced by clear(), mrpt::slam::CMetricMapBuilder::enterCriticalSection(), mrpt::slam::CMetricMapBuilderICP::initialize(), initialize(), mrpt::slam::CMetricMapBuilder::leaveCriticalSection(), processActionObservation(), and mrpt::slam::CMetricMapBuilderICP::processObservation().
◆ insertionAngDistance
|
protected |
Definition at line 68 of file CMetricMapBuilderRBPF.h.
Referenced by mrpt::slam::CMetricMapBuilderRBPF::TConstructionOptions::dumpToTextStream(), mrpt::slam::CMetricMapBuilderRBPF::TConstructionOptions::loadFromConfigFile(), operator=(), and processActionObservation().
◆ insertionLinDistance
|
protected |
Distances (linear and angular) for inserting a new observation into the map.
Definition at line 68 of file CMetricMapBuilderRBPF.h.
Referenced by mrpt::slam::CMetricMapBuilderRBPF::TConstructionOptions::dumpToTextStream(), mrpt::slam::CMetricMapBuilderRBPF::TConstructionOptions::loadFromConfigFile(), operator=(), and processActionObservation().
◆ localizeAngDistance
|
protected |
Definition at line 72 of file CMetricMapBuilderRBPF.h.
Referenced by mrpt::slam::CMetricMapBuilderRBPF::TConstructionOptions::dumpToTextStream(), mrpt::slam::CMetricMapBuilderRBPF::TConstructionOptions::loadFromConfigFile(), operator=(), and processActionObservation().
◆ localizeLinDistance
|
protected |
Distances (linear and angular) for updating the robot pose estimate (and particles weighs, if applicable).
Definition at line 72 of file CMetricMapBuilderRBPF.h.
Referenced by mrpt::slam::CMetricMapBuilderRBPF::TConstructionOptions::dumpToTextStream(), mrpt::slam::CMetricMapBuilderRBPF::TConstructionOptions::loadFromConfigFile(), operator=(), and processActionObservation().
◆ logging_enable_console_output
|
inherited |
[Default=true] Set it to false in case you don't want the logged messages to be dumped to the output automatically.
Definition at line 239 of file system/COutputLogger.h.
◆ logging_enable_keep_record
|
inherited |
[Default=false] Enables storing all messages into an internal list.
- See also
- writeLogToFile, getLogAsString
Definition at line 242 of file system/COutputLogger.h.
◆ m_min_verbosity_level
|
protectedinherited |
Provided messages with VerbosityLevel smaller than this value shall be ignored.
Definition at line 252 of file system/COutputLogger.h.
Referenced by mrpt::system::COutputLogger::getMinLoggingLevel(), and mrpt::system::COutputLogger::isLoggingLevelVisible().
◆ m_PF_options
|
protected |
The configuration of the particle filter.
Definition at line 64 of file CMetricMapBuilderRBPF.h.
Referenced by operator=(), and processActionObservation().
◆ m_statsLastIteration
| TStats mrpt::slam::CMetricMapBuilderRBPF::m_statsLastIteration |
This structure will hold stats after each execution of processActionObservation.
Definition at line 203 of file CMetricMapBuilderRBPF.h.
Referenced by operator=(), and processActionObservation().
◆ mapPDF
| mrpt::maps::CMultiMetricMapPDF mrpt::slam::CMetricMapBuilderRBPF::mapPDF |
The map PDF: It includes a path and associated map for each particle.
Definition at line 60 of file CMetricMapBuilderRBPF.h.
Referenced by clear(), drawCurrentEstimationToImage(), getCurrentJointEntropy(), getCurrentlyBuiltMap(), getCurrentlyBuiltMapSize(), getCurrentlyBuiltMetricMap(), getCurrentMostLikelyPath(), getCurrentPoseEstimation(), initialize(), operator=(), processActionObservation(), and saveCurrentPathEstimationToTextFile().
◆ odoIncrementSinceLastLocalization
|
protected |
Traveled distance since last localization update.
Definition at line 75 of file CMetricMapBuilderRBPF.h.
Referenced by clear(), getCurrentPoseEstimation(), operator=(), and processActionObservation().
◆ odoIncrementSinceLastMapUpdate
|
protected |
Traveled distance since last map update.
Definition at line 77 of file CMetricMapBuilderRBPF.h.
Referenced by clear(), operator=(), and processActionObservation().
◆ options
|
inherited |
Definition at line 141 of file CMetricMapBuilder.h.
Referenced by mrpt::slam::CMetricMapBuilder::enableMapUpdating(), processActionObservation(), and mrpt::slam::CMetricMapBuilderICP::processObservation().