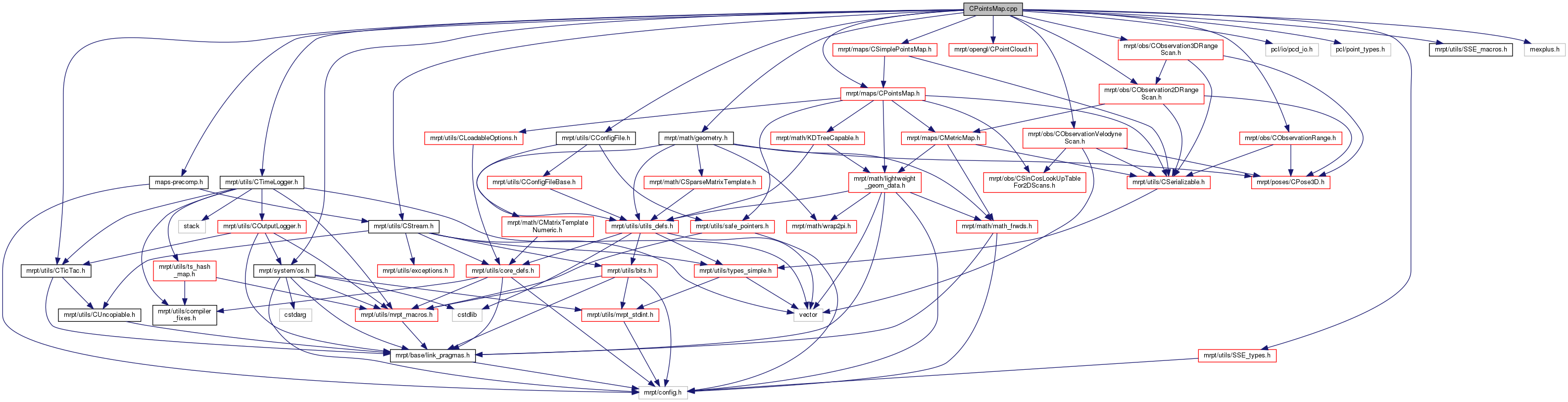
#include "maps-precomp.h"#include <mrpt/utils/CConfigFile.h>#include <mrpt/utils/CTicTac.h>#include <mrpt/utils/CTimeLogger.h>#include <mrpt/system/os.h>#include <mrpt/math/geometry.h>#include <mrpt/utils/CStream.h>#include <mrpt/maps/CPointsMap.h>#include <mrpt/maps/CSimplePointsMap.h>#include <mrpt/opengl/CPointCloud.h>#include <mrpt/obs/CObservationRange.h>#include <mrpt/obs/CObservation2DRangeScan.h>#include <mrpt/obs/CObservation3DRangeScan.h>#include <mrpt/obs/CObservationVelodyneScan.h>#include <pcl/io/pcd_io.h>#include <pcl/point_types.h>#include <mrpt/utils/SSE_types.h>#include <mrpt/utils/SSE_macros.h>#include <mexplus.h>
Include dependency graph for CPointsMap.cpp:
Go to the source code of this file.
Classes | |
| struct | TAuxLoadFunctor |
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::obs | |
| This namespace contains representation of robot actions and observations. | |
Functions | |
| void | internal_build_points_map_from_scan2D (const mrpt::obs::CObservation2DRangeScan &obs, mrpt::maps::CMetricMapPtr &out_map, const void *insertOps) |
Variables | |
| void OBS_IMPEXP(* | mrpt::obs::ptr_internal_build_points_map_from_scan2D )(const mrpt::obs::CObservation2DRangeScan &obs, mrpt::maps::CMetricMapPtr &out_map, const void *insertOps) = NULL |
| TAuxLoadFunctor | dummy_loader |
Function Documentation
◆ internal_build_points_map_from_scan2D()
| void internal_build_points_map_from_scan2D | ( | const mrpt::obs::CObservation2DRangeScan & | obs, |
| mrpt::maps::CMetricMapPtr & | out_map, | ||
| const void * | insertOps | ||
| ) |
Definition at line 1469 of file CPointsMap.cpp.
References mrpt::maps::CSimplePointsMap::Create(), and mrpt::maps::CPointsMap::insertionOptions.
Referenced by TAuxLoadFunctor::TAuxLoadFunctor().
Variable Documentation
◆ dummy_loader
| TAuxLoadFunctor dummy_loader |
Definition at line 1491 of file CPointsMap.cpp.