Detailed Description
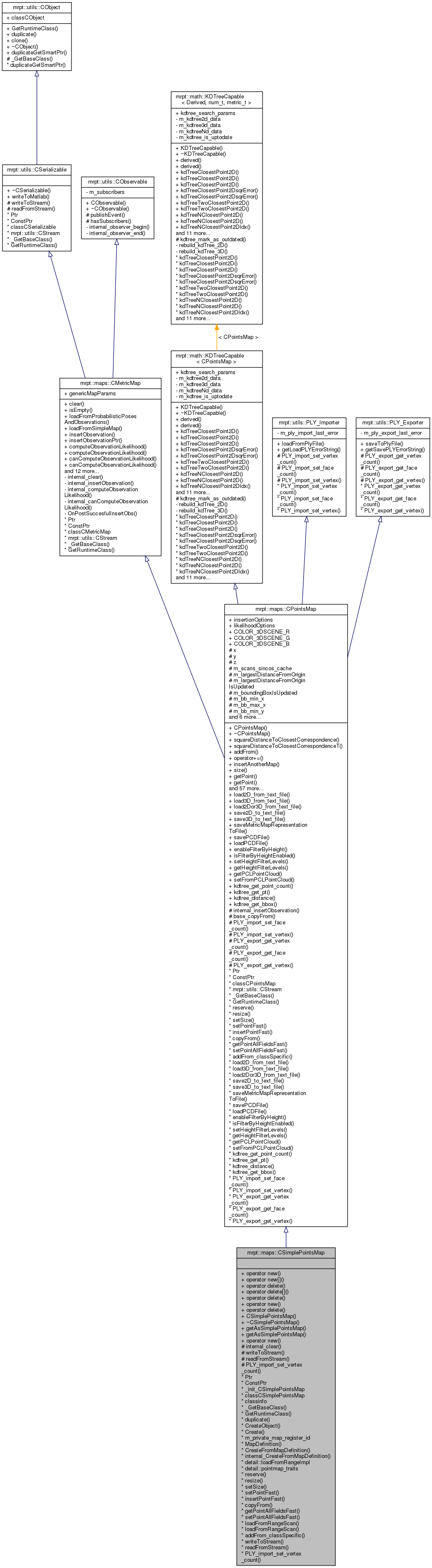
A cloud of points in 2D or 3D, which can be built from a sequence of laser scans.
This class only stores the coordinates (x,y,z) of each point.
See mrpt::maps::CPointsMap and derived classes for other point cloud classes.
- See also
- CMetricMap, CWeightedPointsMap, CPoint, mrpt::utils::CSerializable
Definition at line 33 of file maps/CSimplePointsMap.h.
#include <mrpt/maps/CSimplePointsMap.h>
Classes | |
| struct | TMapDefinition |
| struct | TMapDefinitionBase |
Public Types | |
| typedef KDTreeCapable< CPointsMap, float, nanoflann::L2_Simple_Adaptor< float,CPointsMap > > | self_t |
Public Member Functions | |
| void * | operator new (size_t size) |
| void * | operator new[] (size_t size) |
| void | operator delete (void *ptr) throw () |
| void | operator delete[] (void *ptr) throw () |
| void | operator delete (void *memory, void *ptr) throw () |
| void * | operator new (size_t size, const std::nothrow_t &) throw () |
| void | operator delete (void *ptr, const std::nothrow_t &) throw () |
| CSimplePointsMap () | |
| Default constructor. More... | |
| virtual | ~CSimplePointsMap () |
| Destructor. More... | |
| virtual const mrpt::maps::CSimplePointsMap * | getAsSimplePointsMap () const MRPT_OVERRIDE |
| If the map is a simple points map or it's a multi-metric map that contains EXACTLY one simple points map, return it. More... | |
| virtual mrpt::maps::CSimplePointsMap * | getAsSimplePointsMap () MRPT_OVERRIDE |
| virtual float | squareDistanceToClosestCorrespondence (float x0, float y0) const MRPT_OVERRIDE |
| Returns the square distance from the 2D point (x0,y0) to the closest correspondence in the map. More... | |
| float | squareDistanceToClosestCorrespondenceT (const mrpt::math::TPoint2D &p0) const |
| virtual void | addFrom (const CPointsMap &anotherMap) |
| Adds all the points from anotherMap to this map, without fusing. More... | |
| void | operator+= (const CPointsMap &anotherMap) |
| This operator is synonymous with addFrom. More... | |
| void | insertAnotherMap (const CPointsMap *otherMap, const mrpt::poses::CPose3D &otherPose) |
| Insert the contents of another map into this one with some geometric transformation, without fusing close points. More... | |
| size_t | size () const |
| Returns the number of stored points in the map. More... | |
| unsigned long | getPoint (size_t index, float &x, float &y, float &z) const |
| Access to a given point from map, as a 2D point. More... | |
| unsigned long | getPoint (size_t index, float &x, float &y) const |
| This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts. More... | |
| unsigned long | getPoint (size_t index, double &x, double &y, double &z) const |
| This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts. More... | |
| unsigned long | getPoint (size_t index, double &x, double &y) const |
| This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts. More... | |
| unsigned long | getPoint (size_t index, mrpt::math::TPoint2D &p) const |
| This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts. More... | |
| unsigned long | getPoint (size_t index, mrpt::math::TPoint3D &p) const |
| This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts. More... | |
| virtual void | getPoint (size_t index, float &x, float &y, float &z, float &R, float &G, float &B) const |
| Access to a given point from map, and its colors, if the map defines them (othersise, R=G=B=1.0). More... | |
| void | getPointFast (size_t index, float &x, float &y, float &z) const |
| Just like getPoint() but without checking out-of-bound index and without returning the point weight, just XYZ. More... | |
| virtual bool | hasColorPoints () const |
| Returns true if the point map has a color field for each point. More... | |
| void | setPoint (size_t index, float x, float y, float z) |
| Changes a given point from map, with Z defaulting to 0 if not provided. More... | |
| void | setPoint (size_t index, const mrpt::math::TPoint2D &p) |
| This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts. More... | |
| void | setPoint (size_t index, const mrpt::math::TPoint3D &p) |
| This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts. More... | |
| void | setPoint (size_t index, float x, float y) |
| This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts. More... | |
| virtual void | setPoint (size_t index, float x, float y, float z, float R, float G, float B) |
| overload (RGB data is ignored in classes without color information) More... | |
| virtual void | setPointWeight (size_t index, unsigned long w) |
| Sets the point weight, which is ignored in all classes but those which actually store that field (Note: No checks are done for out-of-bounds index). More... | |
| virtual unsigned int | getPointWeight (size_t index) const |
| Gets the point weight, which is ignored in all classes (defaults to 1) but in those which actually store that field (Note: No checks are done for out-of-bounds index). More... | |
| void | getPointsBuffer (size_t &outPointsCount, const float *&xs, const float *&ys, const float *&zs) const |
| Provides a direct access to points buffer, or NULL if there is no points in the map. More... | |
| const std::vector< float > & | getPointsBufferRef_x () const |
| Provides a direct access to a read-only reference of the internal point buffer. More... | |
| const std::vector< float > & | getPointsBufferRef_y () const |
| Provides a direct access to a read-only reference of the internal point buffer. More... | |
| const std::vector< float > & | getPointsBufferRef_z () const |
| Provides a direct access to a read-only reference of the internal point buffer. More... | |
| template<class VECTOR > | |
| void | getAllPoints (VECTOR &xs, VECTOR &ys, VECTOR &zs, size_t decimation=1) const |
| Returns a copy of the 2D/3D points as a std::vector of float coordinates. More... | |
| template<class CONTAINER > | |
| void | getAllPoints (CONTAINER &ps, size_t decimation=1) const |
| Gets all points as a STL-like container. More... | |
| void | getAllPoints (std::vector< float > &xs, std::vector< float > &ys, size_t decimation=1) const |
| Returns a copy of the 2D/3D points as a std::vector of float coordinates. More... | |
| void | getAllPoints (std::vector< mrpt::math::TPoint2D > &ps, size_t decimation=1) const |
| void | insertPoint (float x, float y, float z=0) |
| Provides a way to insert (append) individual points into the map: the missing fields of child classes (color, weight, etc) are left to their default values. More... | |
| void | insertPoint (const mrpt::math::TPoint3D &p) |
| This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts. More... | |
| virtual void | insertPoint (float x, float y, float z, float R, float G, float B) |
| overload (RGB data is ignored in classes without color information) More... | |
| template<typename VECTOR > | |
| void | setAllPointsTemplate (const VECTOR &X, const VECTOR &Y, const VECTOR &Z=VECTOR()) |
| Set all the points at once from vectors with X,Y and Z coordinates (if Z is not provided, it will be set to all zeros). More... | |
| void | setAllPoints (const std::vector< float > &X, const std::vector< float > &Y, const std::vector< float > &Z) |
| Set all the points at once from vectors with X,Y and Z coordinates. More... | |
| void | setAllPoints (const std::vector< float > &X, const std::vector< float > &Y) |
| Set all the points at once from vectors with X and Y coordinates (Z=0). More... | |
| void | getPointAllFields (const size_t index, std::vector< float > &point_data) const |
| Get all the data fields for one point as a vector: depending on the implementation class this can be [X Y Z] or [X Y Z R G B], etc... More... | |
| void | setPointAllFields (const size_t index, const std::vector< float > &point_data) |
| Set all the data fields for one point as a vector: depending on the implementation class this can be [X Y Z] or [X Y Z R G B], etc... More... | |
| void | clipOutOfRangeInZ (float zMin, float zMax) |
| Delete points out of the given "z" axis range have been removed. More... | |
| void | clipOutOfRange (const mrpt::math::TPoint2D &point, float maxRange) |
| Delete points which are more far than "maxRange" away from the given "point". More... | |
| void | applyDeletionMask (const std::vector< bool > &mask) |
| Remove from the map the points marked in a bool's array as "true". More... | |
| virtual void | determineMatching2D (const mrpt::maps::CMetricMap *otherMap, const mrpt::poses::CPose2D &otherMapPose, mrpt::utils::TMatchingPairList &correspondences, const TMatchingParams ¶ms, TMatchingExtraResults &extraResults) const MRPT_OVERRIDE |
| Computes the matching between this and another 2D point map, which includes finding: More... | |
| virtual void | determineMatching3D (const mrpt::maps::CMetricMap *otherMap, const mrpt::poses::CPose3D &otherMapPose, mrpt::utils::TMatchingPairList &correspondences, const TMatchingParams ¶ms, TMatchingExtraResults &extraResults) const MRPT_OVERRIDE |
| Computes the matchings between this and another 3D points map - method used in 3D-ICP. More... | |
| float | compute3DMatchingRatio (const mrpt::maps::CMetricMap *otherMap, const mrpt::poses::CPose3D &otherMapPose, const TMatchingRatioParams ¶ms) const MRPT_OVERRIDE |
| Computes the ratio in [0,1] of correspondences between "this" and the "otherMap" map, whose 6D pose relative to "this" is "otherMapPose" In the case of a multi-metric map, this returns the average between the maps. More... | |
| void | compute3DDistanceToMesh (const mrpt::maps::CMetricMap *otherMap2, const mrpt::poses::CPose3D &otherMapPose, float maxDistForCorrespondence, mrpt::utils::TMatchingPairList &correspondences, float &correspondencesRatio) |
| Computes the matchings between this and another 3D points map. More... | |
| void | loadFromVelodyneScan (const mrpt::obs::CObservationVelodyneScan &scan, const mrpt::poses::CPose3D *robotPose=NULL) |
| Like loadFromRangeScan() for Velodyne 3D scans. More... | |
| void | fuseWith (CPointsMap *anotherMap, float minDistForFuse=0.02f, std::vector< bool > *notFusedPoints=NULL) |
| Insert the contents of another map into this one, fusing the previous content with the new one. More... | |
| void | changeCoordinatesReference (const mrpt::poses::CPose2D &b) |
Replace each point  by by  (pose compounding operator). More... (pose compounding operator). More... | |
| void | changeCoordinatesReference (const mrpt::poses::CPose3D &b) |
| Replace each point by (pose compounding operator). More... | |
| void | changeCoordinatesReference (const CPointsMap &other, const mrpt::poses::CPose3D &b) |
| Copy all the points from "other" map to "this", replacing each point by (pose compounding operator). More... | |
| virtual bool | isEmpty () const MRPT_OVERRIDE |
| Returns true if the map is empty/no observation has been inserted. More... | |
| bool | empty () const |
| STL-like method to check whether the map is empty: More... | |
| virtual void | getAs3DObject (mrpt::opengl::CSetOfObjectsPtr &outObj) const MRPT_OVERRIDE |
| Returns a 3D object representing the map. More... | |
| float | getLargestDistanceFromOrigin () const |
| This method returns the largest distance from the origin to any of the points, such as a sphere centered at the origin with this radius cover ALL the points in the map (the results are buffered, such as, if the map is not modified, the second call will be much faster than the first one). More... | |
| float | getLargestDistanceFromOriginNoRecompute (bool &output_is_valid) const |
| Like getLargestDistanceFromOrigin() but returns in output_is_valid = false if the distance was not already computed, skipping its computation then, unlike getLargestDistanceFromOrigin() More... | |
| void | boundingBox (float &min_x, float &max_x, float &min_y, float &max_y, float &min_z, float &max_z) const |
| Computes the bounding box of all the points, or (0,0 ,0,0, 0,0) if there are no points. More... | |
| void | boundingBox (mrpt::math::TPoint3D &pMin, mrpt::math::TPoint3D &pMax) const |
| void | extractCylinder (const mrpt::math::TPoint2D ¢er, const double radius, const double zmin, const double zmax, CPointsMap *outMap) |
| Extracts the points in the map within a cylinder in 3D defined the provided radius and zmin/zmax values. More... | |
| void | extractPoints (const mrpt::math::TPoint3D &corner1, const mrpt::math::TPoint3D &corner2, CPointsMap *outMap, const double &R=1, const double &G=1, const double &B=1) |
| Extracts the points in the map within the area defined by two corners. More... | |
| virtual double | internal_computeObservationLikelihood (const mrpt::obs::CObservation *obs, const mrpt::poses::CPose3D &takenFrom) MRPT_OVERRIDE |
| Internal method called by computeObservationLikelihood() More... | |
| void | mark_as_modified () const |
| Users normally don't need to call this. More... | |
| void | clear () |
| Erase all the contents of the map. More... | |
| void | loadFromProbabilisticPosesAndObservations (const mrpt::maps::CSimpleMap &Map) |
| Load the map contents from a CSimpleMap object, erasing all previous content of the map. More... | |
| void | loadFromSimpleMap (const mrpt::maps::CSimpleMap &Map) |
| Load the map contents from a CSimpleMap object, erasing all previous content of the map. More... | |
| bool | insertObservation (const mrpt::obs::CObservation *obs, const mrpt::poses::CPose3D *robotPose=NULL) |
| Insert the observation information into this map. More... | |
| bool | insertObservationPtr (const mrpt::obs::CObservationPtr &obs, const mrpt::poses::CPose3D *robotPose=NULL) |
| A wrapper for smart pointers, just calls the non-smart pointer version. More... | |
| double | computeObservationLikelihood (const mrpt::obs::CObservation *obs, const mrpt::poses::CPose3D &takenFrom) |
| Computes the log-likelihood of a given observation given an arbitrary robot 3D pose. More... | |
| double | computeObservationLikelihood (const mrpt::obs::CObservation *obs, const mrpt::poses::CPose2D &takenFrom) |
| This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts. More... | |
| virtual bool | canComputeObservationLikelihood (const mrpt::obs::CObservation *obs) const |
| Returns true if this map is able to compute a sensible likelihood function for this observation (i.e. More... | |
| bool | canComputeObservationLikelihood (const mrpt::obs::CObservationPtr &obs) const |
| This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts. More... | |
| double | computeObservationsLikelihood (const mrpt::obs::CSensoryFrame &sf, const mrpt::poses::CPose2D &takenFrom) |
| Returns the sum of the log-likelihoods of each individual observation within a mrpt::obs::CSensoryFrame. More... | |
| bool | canComputeObservationsLikelihood (const mrpt::obs::CSensoryFrame &sf) const |
| Returns true if this map is able to compute a sensible likelihood function for this observation (i.e. More... | |
| virtual void | auxParticleFilterCleanUp () |
| This method is called at the end of each "prediction-update-map insertion" cycle within "mrpt::slam::CMetricMapBuilderRBPF::processActionObservation". More... | |
| virtual mxArray * | writeToMatlab () const |
Introduces a pure virtual method responsible for writing to a mxArray Matlab object, typically a MATLAB struct whose contents are documented in each derived class. More... | |
| CObject * | clone () const |
| Cloning interface for smart pointers. More... | |
| const CPointsMap & | derived () const |
| CRTP helper method. More... | |
| CPointsMap & | derived () |
| CRTP helper method. More... | |
| bool | loadFromPlyFile (const std::string &filename, CStringList *file_comments=NULL, CStringList *file_obj_info=NULL) |
| Loads from a PLY file. More... | |
| std::string | getLoadPLYErrorString () const |
| Return a description of the error if loadFromPlyFile() returned false, or an empty string if the file was loaded without problems. More... | |
| bool | saveToPlyFile (const std::string &filename, bool save_in_binary=false, const CStringList &file_comments=CStringList(), const CStringList &file_obj_info=CStringList()) const |
| Saves to a PLY file. More... | |
| std::string | getSavePLYErrorString () const |
| Return a description of the error if loadFromPlyFile() returned false, or an empty string if the file was loaded without problems. More... | |
File input/output methods | |
| bool | load2D_from_text_file (const std::string &file) |
| Load from a text file. More... | |
| bool | load3D_from_text_file (const std::string &file) |
| Load from a text file. More... | |
| bool | load2Dor3D_from_text_file (const std::string &file, const bool is_3D) |
| 2D or 3D generic implementation of load2D_from_text_file and load3D_from_text_file More... | |
| bool | save2D_to_text_file (const std::string &file) const |
| Save to a text file. More... | |
| bool | save3D_to_text_file (const std::string &file) const |
| Save to a text file. More... | |
| void | saveMetricMapRepresentationToFile (const std::string &filNamePrefix) const MRPT_OVERRIDE |
| This virtual method saves the map to a file "filNamePrefix"+< some_file_extension >, as an image or in any other applicable way (Notice that other methods to save the map may be implemented in classes implementing this virtual interface) More... | |
| virtual bool | savePCDFile (const std::string &filename, bool save_as_binary) const |
| Save the point cloud as a PCL PCD file, in either ASCII or binary format (requires MRPT built against PCL) More... | |
| virtual bool | loadPCDFile (const std::string &filename) |
| Load the point cloud from a PCL PCD file (requires MRPT built against PCL) More... | |
Filter-by-height stuff | |
| void | enableFilterByHeight (bool enable=true) |
| Enable/disable the filter-by-height functionality. More... | |
| bool | isFilterByHeightEnabled () const |
| Return whether filter-by-height is enabled. More... | |
| void | setHeightFilterLevels (const double _z_min, const double _z_max) |
| Set the min/max Z levels for points to be actually inserted in the map (only if enableFilterByHeight() was called before). More... | |
| void | getHeightFilterLevels (double &_z_min, double &_z_max) const |
| Get the min/max Z levels for points to be actually inserted in the map. More... | |
PCL library support | |
| template<class POINTCLOUD > | |
| void | getPCLPointCloud (POINTCLOUD &cloud) const |
| Use to convert this MRPT point cloud object into a PCL point cloud object (PointCloud<PointXYZ>). More... | |
| template<class POINTCLOUD > | |
| void | setFromPCLPointCloud (const POINTCLOUD &cloud) |
| Loads a PCL point cloud into this MRPT class (note: this method ignores potential RGB information, see CColouredPointsMap::setFromPCLPointCloudRGB() ). More... | |
Methods that MUST be implemented by children classes of KDTreeCapable | |
| size_t | kdtree_get_point_count () const |
| Must return the number of data points. More... | |
| float | kdtree_get_pt (const size_t idx, int dim) const |
| Returns the dim'th component of the idx'th point in the class: More... | |
| float | kdtree_distance (const float *p1, const size_t idx_p2, size_t size) const |
| Returns the distance between the vector "p1[0:size-1]" and the data point with index "idx_p2" stored in the class: More... | |
| template<typename BBOX > | |
| bool | kdtree_get_bbox (BBOX &bb) const |
RTTI classes and functions | |
| mrpt::utils::CObjectPtr | duplicateGetSmartPtr () const |
| Returns a copy of the object, indepently of its class, as a smart pointer (the newly created object will exist as long as any copy of this smart pointer). More... | |
Static Public Member Functions | |
| static void * | operator new (size_t size, void *ptr) |
Public Attributes | |
| TInsertionOptions | insertionOptions |
| The options used when inserting observations in the map. More... | |
| TLikelihoodOptions | likelihoodOptions |
| TMapGenericParams | genericMapParams |
| Common params to all maps. More... | |
| TKDTreeSearchParams | kdtree_search_params |
| Parameters to tune the ANN searches. More... | |
Static Public Attributes | |
| static float | COLOR_3DSCENE_R = 0 |
| The color [0,1] of points when extracted from getAs3DObject (default=blue) More... | |
| static float | COLOR_3DSCENE_G = 0 |
| static float | COLOR_3DSCENE_B = 1 |
| static const mrpt::utils::TRuntimeClassId | classCObject |
RTTI stuff <br> | |
| static const mrpt::utils::TRuntimeClassId | classCPointsMap |
RTTI stuff <br> | |
| static const mrpt::utils::TRuntimeClassId | classCMetricMap |
RTTI stuff <br> | |
| static const mrpt::utils::TRuntimeClassId | classCSerializable |
Protected Member Functions | |
| virtual void | internal_clear () MRPT_OVERRIDE |
| Clear the map, erasing all the points. More... | |
| bool | internal_insertObservation (const mrpt::obs::CObservation *obs, const mrpt::poses::CPose3D *robotPose) MRPT_OVERRIDE |
| This is a common version of CMetricMap::insertObservation() for point maps (actually, CMetricMap::internal_insertObservation), so derived classes don't need to worry implementing that method unless something special is really necesary. More... | |
| void | base_copyFrom (const CPointsMap &obj) |
| Helper method for ::copyFrom() More... | |
| void | publishEvent (const mrptEvent &e) const |
| Called when you want this object to emit an event to all the observers currently subscribed to this object. More... | |
| bool | hasSubscribers () const |
| Can be called by a derived class before preparing an event for publishing with publishEvent to determine if there is no one subscribed, so it can save the wasted time preparing an event that will be not read. More... | |
CSerializable virtual methods | |
| void | writeToStream (mrpt::utils::CStream &out, int *getVersion) const |
| Introduces a pure virtual method responsible for writing to a CStream. More... | |
| void | readFromStream (mrpt::utils::CStream &in, int version) |
| Introduces a pure virtual method responsible for loading from a CStream This can not be used directly be users, instead use "stream >> object;" for reading it from a stream or "stream >> object_ptr;" if the class is unknown apriori. More... | |
PLY Import virtual methods to implement in base classes | |
| virtual void | PLY_import_set_vertex_count (const size_t N) MRPT_OVERRIDE |
| In a base class, reserve memory to prepare subsequent calls to PLY_import_set_vertex. More... | |
PLY Import virtual methods to implement in base classes | |
| virtual void | PLY_import_set_face_count (const size_t N) MRPT_OVERRIDE |
| In a base class, reserve memory to prepare subsequent calls to PLY_import_set_face. More... | |
| virtual void | PLY_import_set_vertex (const size_t idx, const mrpt::math::TPoint3Df &pt, const mrpt::utils::TColorf *pt_color=NULL) MRPT_OVERRIDE |
| In a base class, will be called after PLY_import_set_vertex_count() once for each loaded point. More... | |
PLY Export virtual methods to implement in base classes | |
| size_t | PLY_export_get_vertex_count () const MRPT_OVERRIDE |
| In a base class, return the number of vertices. More... | |
| size_t | PLY_export_get_face_count () const MRPT_OVERRIDE |
| In a base class, return the number of faces. More... | |
| virtual void | PLY_export_get_vertex (const size_t idx, mrpt::math::TPoint3Df &pt, bool &pt_has_color, mrpt::utils::TColorf &pt_color) const MRPT_OVERRIDE |
| In a base class, will be called after PLY_export_get_vertex_count() once for each exported point. More... | |
Protected Attributes | |
| std::vector< float > | x |
| std::vector< float > | y |
| std::vector< float > | z |
| The point coordinates. More... | |
| mrpt::obs::CSinCosLookUpTableFor2DScans | m_scans_sincos_cache |
| Cache of sin/cos values for the latest 2D scan geometries. More... | |
| float | m_largestDistanceFromOrigin |
| Auxiliary variables used in "getLargestDistanceFromOrigin". More... | |
| bool | m_largestDistanceFromOriginIsUpdated |
| Auxiliary variables used in "getLargestDistanceFromOrigin". More... | |
| bool | m_boundingBoxIsUpdated |
| float | m_bb_min_x |
| float | m_bb_max_x |
| float | m_bb_min_y |
| float | m_bb_max_y |
| float | m_bb_min_z |
| float | m_bb_max_z |
| double | m_heightfilter_z_min |
| The minimum and maximum height for a certain laser scan to be inserted into this map. More... | |
| double | m_heightfilter_z_max |
| bool | m_heightfilter_enabled |
| Whether or not (default=not) filter the input points by height. More... | |
Private Member Functions | |
| virtual bool | internal_canComputeObservationLikelihood (const mrpt::obs::CObservation *obs) const |
| Internal method called by canComputeObservationLikelihood() More... | |
| virtual void | OnPostSuccesfulInsertObs (const mrpt::obs::CObservation *) |
| Hook for each time a "internal_insertObservation" returns "true" This is called automatically from insertObservation() when internal_insertObservation returns true. More... | |
| void | internal_observer_begin (CObserver *) |
| void | internal_observer_end (CObserver *) |
Private Attributes | |
| std::set< CObserver * > | m_subscribers |
| std::string | m_ply_import_last_error |
| std::string | m_ply_export_last_error |
RTTI stuff <br> | |
| typedef CSimplePointsMapPtr | Ptr |
| typedef CSimplePointsMapPtr | ConstPtr |
| static mrpt::utils::CLASSINIT | _init_CSimplePointsMap |
| static mrpt::utils::TRuntimeClassId | classCSimplePointsMap |
| static const mrpt::utils::TRuntimeClassId * | classinfo |
| static const mrpt::utils::TRuntimeClassId * | _GetBaseClass () |
| virtual const mrpt::utils::TRuntimeClassId * | GetRuntimeClass () const |
| Returns information about the class of an object in runtime. More... | |
| virtual mrpt::utils::CObject * | duplicate () const |
| Returns a copy of the object, indepently of its class. More... | |
| static mrpt::utils::CObject * | CreateObject () |
| static CSimplePointsMapPtr | Create () |
Map Definition Interface stuff (see mrpt::maps::TMetricMapInitializer) @{ | |
| static const size_t | m_private_map_register_id = mrpt::maps::internal::TMetricMapTypesRegistry::Instance().doRegister( "CSimplePointsMap,pointsMap" ,& mrpt::maps::CSimplePointsMap ::MapDefinition,& mrpt::maps::CSimplePointsMap ::internal_CreateFromMapDefinition) |
| ID used to initialize class registration (just ignore it) More... | |
| static mrpt::maps::TMetricMapInitializer * | MapDefinition () |
| Returns default map definition initializer. More... | |
| static CSimplePointsMap * | CreateFromMapDefinition (const mrpt::maps::TMetricMapInitializer &def) |
| Constructor from a map definition structure: initializes the map and its parameters accordingly. More... | |
| static mrpt::maps::CMetricMap * | internal_CreateFromMapDefinition (const mrpt::maps::TMetricMapInitializer &def) |
Pure virtual interfaces to be implemented by any class derived from CPointsMap | |
| template<class Derived > | |
| struct | detail::loadFromRangeImpl |
| template<class Derived > | |
| struct | detail::pointmap_traits |
| virtual void | reserve (size_t newLength) MRPT_OVERRIDE |
| Reserves memory for a given number of points: the size of the map does not change, it only reserves the memory. More... | |
| virtual void | resize (size_t newLength) MRPT_OVERRIDE |
| Resizes all point buffers so they can hold the given number of points: newly created points are set to default values, and old contents are not changed. More... | |
| virtual void | setSize (size_t newLength) MRPT_OVERRIDE |
| Resizes all point buffers so they can hold the given number of points, erasing all previous contents and leaving all points to default values. More... | |
| virtual void | setPointFast (size_t index, float x, float y, float z) MRPT_OVERRIDE |
| Changes the coordinates of the given point (0-based index), without checking for out-of-bounds and without calling mark_as_modified() More... | |
| virtual void | insertPointFast (float x, float y, float z=0) MRPT_OVERRIDE |
| The virtual method for insertPoint() without calling mark_as_modified() More... | |
| virtual void | copyFrom (const CPointsMap &obj) MRPT_OVERRIDE |
| Virtual assignment operator, to be implemented in derived classes More... | |
| virtual void | getPointAllFieldsFast (const size_t index, std::vector< float > &point_data) const MRPT_OVERRIDE |
| Get all the data fields for one point as a vector: [X Y Z] Unlike getPointAllFields(), this method does not check for index out of bounds. More... | |
| virtual void | setPointAllFieldsFast (const size_t index, const std::vector< float > &point_data) MRPT_OVERRIDE |
| Set all the data fields for one point as a vector: [X Y Z] Unlike setPointAllFields(), this method does not check for index out of bounds. More... | |
| virtual void | loadFromRangeScan (const mrpt::obs::CObservation2DRangeScan &rangeScan, const mrpt::poses::CPose3D *robotPose=NULL) MRPT_OVERRIDE |
| See CPointsMap::loadFromRangeScan() More... | |
| virtual void | loadFromRangeScan (const mrpt::obs::CObservation3DRangeScan &rangeScan, const mrpt::poses::CPose3D *robotPose=NULL) MRPT_OVERRIDE |
| See CPointsMap::loadFromRangeScan() More... | |
| virtual void | addFrom_classSpecific (const CPointsMap &anotherMap, const size_t nPreviousPoints) MRPT_OVERRIDE |
| Auxiliary method called from within addFrom() automatically, to finish the copying of class-specific data More... | |
Public utility methods to query the KD-tree | |
| size_t | kdTreeClosestPoint2D (float x0, float y0, float &out_x, float &out_y, float &out_dist_sqr) const |
| KD Tree-based search for the closest point (only ONE) to some given 2D coordinates. More... | |
| size_t | kdTreeClosestPoint2D (float x0, float y0, float &out_dist_sqr) const |
| This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts. More... | |
| size_t | kdTreeClosestPoint2D (const TPoint2D &p0, TPoint2D &pOut, float &outDistSqr) const |
| This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts. More... | |
| float | kdTreeClosestPoint2DsqrError (float x0, float y0) const |
| Like kdTreeClosestPoint2D, but just return the square error from some point to its closest neighbor. More... | |
| float | kdTreeClosestPoint2DsqrError (const TPoint2D &p0) const |
| void | kdTreeTwoClosestPoint2D (float x0, float y0, float &out_x1, float &out_y1, float &out_x2, float &out_y2, float &out_dist_sqr1, float &out_dist_sqr2) const |
| KD Tree-based search for the TWO closest point to some given 2D coordinates. More... | |
| void | kdTreeTwoClosestPoint2D (const TPoint2D &p0, TPoint2D &pOut1, TPoint2D &pOut2, float &outDistSqr1, float &outDistSqr2) const |
| std::vector< size_t > | kdTreeNClosestPoint2D (float x0, float y0, size_t knn, std::vector< float > &out_x, std::vector< float > &out_y, std::vector< float > &out_dist_sqr) const |
| KD Tree-based search for the N closest point to some given 2D coordinates. More... | |
| std::vector< size_t > | kdTreeNClosestPoint2D (const TPoint2D &p0, size_t N, std::vector< TPoint2D > &pOut, std::vector< float > &outDistSqr) const |
| void | kdTreeNClosestPoint2DIdx (float x0, float y0, size_t knn, std::vector< size_t > &out_idx, std::vector< float > &out_dist_sqr) const |
| KD Tree-based search for the N closest point to some given 2D coordinates and returns their indexes. More... | |
| void | kdTreeNClosestPoint2DIdx (const TPoint2D &p0, size_t N, std::vector< size_t > &outIdx, std::vector< float > &outDistSqr) const |
| size_t | kdTreeClosestPoint3D (float x0, float y0, float z0, float &out_x, float &out_y, float &out_z, float &out_dist_sqr) const |
| KD Tree-based search for the closest point (only ONE) to some given 3D coordinates. More... | |
| size_t | kdTreeClosestPoint3D (float x0, float y0, float z0, float &out_dist_sqr) const |
| This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts. More... | |
| size_t | kdTreeClosestPoint3D (const TPoint3D &p0, TPoint3D &pOut, float &outDistSqr) const |
| This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts. More... | |
| void | kdTreeNClosestPoint3D (float x0, float y0, float z0, size_t knn, std::vector< float > &out_x, std::vector< float > &out_y, std::vector< float > &out_z, std::vector< float > &out_dist_sqr) const |
| KD Tree-based search for the N closest points to some given 3D coordinates. More... | |
| void | kdTreeNClosestPoint3D (const TPoint3D &p0, size_t N, std::vector< TPoint3D > &pOut, std::vector< float > &outDistSqr) const |
| void | kdTreeNClosestPoint3DWithIdx (float x0, float y0, float z0, size_t knn, std::vector< float > &out_x, std::vector< float > &out_y, std::vector< float > &out_z, std::vector< size_t > &out_idx, std::vector< float > &out_dist_sqr) const |
| KD Tree-based search for the N closest points to some given 3D coordinates. More... | |
| size_t | kdTreeRadiusSearch3D (const float x0, const float y0, const float z0, const float maxRadiusSqr, std::vector< std::pair< size_t, float > > &out_indices_dist) const |
| KD Tree-based search for all the points within a given radius of some 3D point. More... | |
| size_t | kdTreeRadiusSearch2D (const float x0, const float y0, const float maxRadiusSqr, std::vector< std::pair< size_t, float > > &out_indices_dist) const |
| KD Tree-based search for all the points within a given radius of some 2D point. More... | |
| void | kdTreeNClosestPoint3DIdx (float x0, float y0, float z0, size_t knn, std::vector< size_t > &out_idx, std::vector< float > &out_dist_sqr) const |
| KD Tree-based search for the N closest point to some given 3D coordinates and returns their indexes. More... | |
| void | kdTreeNClosestPoint3DIdx (const TPoint3D &p0, size_t N, std::vector< size_t > &outIdx, std::vector< float > &outDistSqr) const |
| void | kdtree_mark_as_outdated () const |
| To be called by child classes when KD tree data changes. More... | |
| void | rebuild_kdTree_2D () const |
| Rebuild, if needed the KD-tree for 2D (nDims=2), 3D (nDims=3), ... asking the child class for the data points. More... | |
| void | rebuild_kdTree_3D () const |
| Rebuild, if needed the KD-tree for 2D (nDims=2), 3D (nDims=3), ... asking the child class for the data points. More... | |
| TKDTreeDataHolder< 2 > | m_kdtree2d_data |
| TKDTreeDataHolder< 3 > | m_kdtree3d_data |
| TKDTreeDataHolder | m_kdtreeNd_data |
| bool | m_kdtree_is_uptodate |
| whether the KD tree needs to be rebuilt or not. More... | |
Member Typedef Documentation
◆ ConstPtr
| typedef CSimplePointsMapPtr mrpt::maps::CSimplePointsMap::ConstPtr |
Definition at line 36 of file maps/CSimplePointsMap.h.
◆ Ptr
| typedef CSimplePointsMapPtr mrpt::maps::CSimplePointsMap::Ptr |
A typedef for the associated smart pointer
Definition at line 36 of file maps/CSimplePointsMap.h.
◆ self_t
|
inherited |
Definition at line 71 of file KDTreeCapable.h.
Constructor & Destructor Documentation
◆ CSimplePointsMap()
| CSimplePointsMap::CSimplePointsMap | ( | ) |
Default constructor.
Definition at line 60 of file CSimplePointsMap.cpp.
◆ ~CSimplePointsMap()
|
virtual |
Destructor.
Definition at line 68 of file CSimplePointsMap.cpp.
Member Function Documentation
◆ _GetBaseClass()
|
staticprotected |
◆ addFrom()
|
virtualinherited |
Adds all the points from anotherMap to this map, without fusing.
This operation can be also invoked via the "+=" operator, for example:
- Note
- The method in CPointsMap is generic but derived classes may redefine this virtual method to another one more optimized.
Definition at line 1531 of file CPointsMap.cpp.
References mrpt::maps::CPointsMap::addFrom_classSpecific(), mrpt::maps::CPointsMap::mark_as_modified(), mrpt::maps::CPointsMap::resize(), mrpt::maps::CPointsMap::size(), mrpt::maps::CPointsMap::x, mrpt::maps::CPointsMap::y, and mrpt::maps::CPointsMap::z.
◆ addFrom_classSpecific()
|
inlineprotectedvirtual |
Auxiliary method called from within addFrom() automatically, to finish the copying of class-specific data
Implements mrpt::maps::CPointsMap.
Definition at line 82 of file maps/CSimplePointsMap.h.
References MRPT_UNUSED_PARAM.
◆ applyDeletionMask()
|
inherited |
Remove from the map the points marked in a bool's array as "true".
- Exceptions
-
std::exception If mask size is not equal to points count.
Definition at line 1591 of file CPointsMap.cpp.
References ASSERT_EQUAL_, mrpt::maps::CPointsMap::getPointAllFieldsFast(), mrpt::maps::CPointsMap::mark_as_modified(), mrpt::maps::CPointsMap::resize(), mrpt::maps::CPointsMap::setPointAllFieldsFast(), and mrpt::maps::CPointsMap::size().
Referenced by mrpt::maps::CPointsMap::clipOutOfRange(), mrpt::maps::CPointsMap::clipOutOfRangeInZ(), mrpt::maps::CPointCloudFilterByDistance::filter(), and mrpt::maps::CPointsMap::internal_insertObservation().
◆ auxParticleFilterCleanUp()
|
inlinevirtualinherited |
This method is called at the end of each "prediction-update-map insertion" cycle within "mrpt::slam::CMetricMapBuilderRBPF::processActionObservation".
This method should normally do nothing, but in some cases can be used to free auxiliary cached variables.
Reimplemented in mrpt::maps::CLandmarksMap, and mrpt::maps::CMultiMetricMap.
Definition at line 232 of file maps/CMetricMap.h.
◆ base_copyFrom()
|
protectedinherited |
Helper method for ::copyFrom()
Definition at line 1651 of file CPointsMap.cpp.
References mrpt::math::KDTreeCapable< CPointsMap >::kdtree_mark_as_outdated(), mrpt::maps::CPointsMap::m_largestDistanceFromOrigin, mrpt::maps::CPointsMap::m_largestDistanceFromOriginIsUpdated, MRPT_END, MRPT_START, and mrpt::maps::CPointsMap::resize().
◆ boundingBox() [1/2]
|
inherited |
Computes the bounding box of all the points, or (0,0 ,0,0, 0,0) if there are no points.
Results are cached unless the map is somehow modified to avoid repeated calculations.
Definition at line 888 of file CPointsMap.cpp.
References mrpt::maps::CPointsMap::m_bb_max_x, mrpt::maps::CPointsMap::m_bb_max_y, mrpt::maps::CPointsMap::m_bb_max_z, mrpt::maps::CPointsMap::m_bb_min_x, mrpt::maps::CPointsMap::m_bb_min_y, mrpt::maps::CPointsMap::m_bb_min_z, mrpt::maps::CPointsMap::m_boundingBoxIsUpdated, min, MRPT_ALIGN16, mrpt::maps::CPointsMap::reserve(), mrpt::maps::CPointsMap::x, mrpt::maps::CPointsMap::y, and mrpt::maps::CPointsMap::z.
Referenced by mrpt::maps::CPointsMap::compute3DDistanceToMesh(), mrpt::maps::CPointsMap::determineMatching2D(), and mrpt::maps::CPointsMap::determineMatching3D().
◆ boundingBox() [2/2]
|
inlineinherited |
Definition at line 625 of file maps/CPointsMap.h.
References mrpt::math::TPoint3D::x, mrpt::math::TPoint3D::y, and mrpt::math::TPoint3D::z.
◆ canComputeObservationLikelihood() [1/2]
|
virtualinherited |
Returns true if this map is able to compute a sensible likelihood function for this observation (i.e.
an occupancy grid map cannot with an image). See: Maps and observations compatibility matrix
- Parameters
-
obs The observation.
- See also
- computeObservationLikelihood, genericMapParams.enableObservationLikelihood
Definition at line 189 of file CMetricMap.cpp.
◆ canComputeObservationLikelihood() [2/2]
|
inherited |
This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts.
◆ canComputeObservationsLikelihood()
|
inherited |
Returns true if this map is able to compute a sensible likelihood function for this observation (i.e.
an occupancy grid map cannot with an image). See: Maps and observations compatibility matrix
- Parameters
-
sf The observations.
- See also
- canComputeObservationLikelihood
Definition at line 94 of file CMetricMap.cpp.
References mrpt::obs::CSensoryFrame::begin(), and mrpt::obs::CSensoryFrame::end().
◆ changeCoordinatesReference() [1/3]
|
inherited |
Copy all the points from "other" map to "this", replacing each point by (pose compounding operator).
Definition at line 593 of file CPointsMap.cpp.
References mrpt::maps::CPointsMap::changeCoordinatesReference(), and mrpt::maps::CPointsMap::copyFrom().
◆ changeCoordinatesReference() [2/3]
|
inherited |
Replace each point by (pose compounding operator).
Definition at line 559 of file CPointsMap.cpp.
References mrpt::poses::CPose3D::composePoint(), and mrpt::maps::CPointsMap::mark_as_modified().
Referenced by mrpt::maps::CPointsMap::changeCoordinatesReference(), mrpt::maps::CHeightGridMap2D_Base::dem_internal_insertObservation(), and TEST_F().
◆ changeCoordinatesReference() [3/3]
|
inherited |
Replace each point by (pose compounding operator).
Definition at line 577 of file CPointsMap.cpp.
References mrpt::poses::CPose3D::composePoint(), and mrpt::maps::CPointsMap::mark_as_modified().
◆ clear()
|
inherited |
Erase all the contents of the map.
Definition at line 34 of file CMetricMap.cpp.
Referenced by mrpt::maps::CGasConcentrationGridMap2D::CGasConcentrationGridMap2D(), mrpt::maps::CHeightGridMap2D_MRF::CHeightGridMap2D_MRF(), mrpt::maps::CHeightGridMap2D::clear(), mrpt::maps::CRandomFieldGridMap2D::clear(), mrpt::maps::CReflectivityGridMap2D::clear(), mrpt::maps::CWirelessPowerGridMap2D::CWirelessPowerGridMap2D(), mrpt::maps::CPointsMap::extractCylinder(), mrpt::maps::CPointsMap::extractPoints(), mrpt::opengl::CAngularObservationMesh::generatePointCloud(), mrpt::maps::COccupancyGridMap2D::getAsPointCloud(), mrpt::maps::CPointsMap::load2Dor3D_from_text_file(), mrpt::maps::CLandmarksMap::loadOccupancyFeaturesFrom2DRangeScan(), mrpt::nav::CReactiveNavigationSystem3D::loggingGetWSObstaclesAndShape(), mrpt::hmtslam::CLSLAM_RBPF_2DLASER::prediction_and_update_pfOptimalProposal(), mrpt::vision::projectMatchedFeatures(), run_rnav_test(), mrpt::maps::CRandomFieldGridMap2D::setSize(), mrpt::nav::PlannerTPS_VirtualBase::transformPointcloudWithSquareClipping(), and mrpt::hmtslam::CLocalMetricHypothesis::updateAreaFromLMH().
◆ clipOutOfRange()
|
inherited |
Delete points which are more far than "maxRange" away from the given "point".
Definition at line 290 of file CPointsMap.cpp.
References mrpt::maps::CPointsMap::applyDeletionMask(), mrpt::maps::CPointsMap::mark_as_modified(), mrpt::maps::CPointsMap::size(), and mrpt::math::square().
◆ clipOutOfRangeInZ()
|
inherited |
Delete points out of the given "z" axis range have been removed.
Definition at line 271 of file CPointsMap.cpp.
References mrpt::maps::CPointsMap::applyDeletionMask(), mrpt::maps::CPointsMap::mark_as_modified(), and mrpt::maps::CPointsMap::size().
◆ clone()
|
inlineinherited |
◆ compute3DDistanceToMesh()
|
inherited |
Computes the matchings between this and another 3D points map.
This method matches each point in the other map with the centroid of the 3 closest points in 3D from this map (if the distance is below a defined threshold).
- Parameters
-
otherMap [IN] The other map to compute the matching with. otherMapPose [IN] The pose of the other map as seen from "this". maxDistForCorrespondence [IN] Maximum 2D linear distance between two points to be matched. correspondences [OUT] The detected matchings pairs. correspondencesRatio [OUT] The ratio [0,1] of points in otherMap with at least one correspondence.
- See also
- determineMatching3D
Definition at line 1202 of file CPointsMap.cpp.
References mrpt::maps::CPointsMap::boundingBox(), mrpt::math::distance(), mrpt::math::KDTreeCapable< CPointsMap >::kdTreeNClosestPoint3DWithIdx(), MRPT_END, MRPT_START, MRPT_UNUSED_PARAM, mrpt::maps::CPointsMap::size(), mrpt::maps::CPointsMap::x, mrpt::maps::CPointsMap::y, and mrpt::maps::CPointsMap::z.
◆ compute3DMatchingRatio()
|
virtualinherited |
Computes the ratio in [0,1] of correspondences between "this" and the "otherMap" map, whose 6D pose relative to "this" is "otherMapPose" In the case of a multi-metric map, this returns the average between the maps.
This method always return 0 for grid maps.
- Parameters
-
otherMap [IN] The other map to compute the matching with. otherMapPose [IN] The 6D pose of the other map as seen from "this". params [IN] Matching parameters
- Returns
- The matching ratio [0,1]
- See also
- determineMatching2D
Reimplemented from mrpt::maps::CMetricMap.
Definition at line 766 of file CPointsMap.cpp.
References mrpt::maps::TMatchingExtraResults::correspondencesRatio, mrpt::maps::CPointsMap::determineMatching3D(), mrpt::maps::CMetricMap::getAsSimplePointsMap(), and mrpt::maps::TMatchingRatioParams::maxDistForCorr.
◆ computeObservationLikelihood() [1/2]
|
inherited |
This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts.
Definition at line 86 of file CMetricMap.cpp.
◆ computeObservationLikelihood() [2/2]
|
inherited |
Computes the log-likelihood of a given observation given an arbitrary robot 3D pose.
See: Maps and observations compatibility matrix
- Parameters
-
takenFrom The robot's pose the observation is supposed to be taken from. obs The observation.
- Returns
- This method returns a log-likelihood.
Definition at line 196 of file CMetricMap.cpp.
Referenced by mrpt::slam::CMonteCarloLocalization2D::PF_SLAM_computeObservationLikelihoodForParticle(), mrpt::slam::CMonteCarloLocalization3D::PF_SLAM_computeObservationLikelihoodForParticle(), and mrpt::maps::CMultiMetricMapPDF::PF_SLAM_computeObservationLikelihoodForParticle().
◆ computeObservationsLikelihood()
|
inherited |
Returns the sum of the log-likelihoods of each individual observation within a mrpt::obs::CSensoryFrame.
See: Maps and observations compatibility matrix
- Parameters
-
takenFrom The robot's pose the observation is supposed to be taken from. sf The set of observations in a CSensoryFrame.
- Returns
- This method returns a log-likelihood.
- See also
- canComputeObservationsLikelihood
Definition at line 75 of file CMetricMap.cpp.
References mrpt::obs::CSensoryFrame::begin(), and mrpt::obs::CSensoryFrame::end().
Referenced by mrpt::hmtslam::CLSLAM_RBPF_2DLASER::auxiliarComputeObservationLikelihood().
◆ copyFrom()
|
virtual |
Virtual assignment operator, to be implemented in derived classes
Implements mrpt::maps::CPointsMap.
Definition at line 110 of file CSimplePointsMap.cpp.
Referenced by mrpt::detectors::CDetectorDoorCrossing::process().
◆ Create()
|
static |
◆ CreateFromMapDefinition()
|
static |
Constructor from a map definition structure: initializes the map and its parameters accordingly.
Definition at line 26 of file CSimplePointsMap.cpp.
◆ CreateObject()
|
static |
◆ derived() [1/2]
|
inlineinherited |
CRTP helper method.
Definition at line 83 of file KDTreeCapable.h.
◆ derived() [2/2]
|
inlineinherited |
CRTP helper method.
Definition at line 81 of file KDTreeCapable.h.
◆ determineMatching2D()
|
virtualinherited |
Computes the matching between this and another 2D point map, which includes finding:
- The set of points pairs in each map
- The mean squared distance between corresponding pairs.
The algorithm is:
- For each point in "otherMap":
- Transform the point according to otherMapPose
- Search with a KD-TREE the closest correspondences in "this" map.
- Add to the set of candidate matchings, if it passes all the thresholds in params.
This method is the most time critical one into ICP-like algorithms.
- Parameters
-
otherMap [IN] The other map to compute the matching with. otherMapPose [IN] The pose of the other map as seen from "this". params [IN] Parameters for the determination of pairings. correspondences [OUT] The detected matchings pairs. extraResults [OUT] Other results.
- See also
- compute3DMatchingRatio
Reimplemented from mrpt::maps::CMetricMap.
Definition at line 308 of file CPointsMap.cpp.
References ASSERT_, ASSERT_ABOVE_, ASSERT_BELOW_, ASSERTMSG_, mrpt::maps::CPointsMap::boundingBox(), CLASS_ID, mrpt::maps::TMatchingExtraResults::correspondencesRatio, mrpt::utils::TRuntimeClassId::derivedFrom(), mrpt::utils::TMatchingPairList::filterUniqueRobustPairs(), mrpt::maps::CMetricMap::GetRuntimeClass(), mrpt::math::KDTreeCapable< CPointsMap >::kdTreeClosestPoint2D(), min, MRPT_ALIGN16, MRPT_END, MRPT_START, mrpt::math::TPose2D::phi, mrpt::poses::CPose2D::phi(), mrpt::maps::CPointsMap::reserve(), mrpt::maps::CPointsMap::size(), mrpt::math::square(), mrpt::maps::TMatchingExtraResults::sumSqrDist, mrpt::math::TPose2D::x, mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::x(), mrpt::maps::CPointsMap::x, mrpt::math::TPose2D::y, mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::y(), mrpt::maps::CPointsMap::y, and mrpt::maps::CPointsMap::z.
Referenced by mrpt::maps::CPointsMap::fuseWith(), and mrpt::slam::CICP::ICP_Method_LM().
◆ determineMatching3D()
|
virtualinherited |
Computes the matchings between this and another 3D points map - method used in 3D-ICP.
This method finds the set of point pairs in each map.
The method is the most time critical one into ICP-like algorithms.
The algorithm is:
- For each point in "otherMap":
- Transform the point according to otherMapPose
- Search with a KD-TREE the closest correspondences in "this" map.
- Add to the set of candidate matchings, if it passes all the thresholds in params.
- Parameters
-
otherMap [IN] The other map to compute the matching with. otherMapPose [IN] The pose of the other map as seen from "this". params [IN] Parameters for the determination of pairings. correspondences [OUT] The detected matchings pairs. extraResults [OUT] Other results.
- See also
- compute3DMatchingRatio
Reimplemented from mrpt::maps::CMetricMap.
Definition at line 1011 of file CPointsMap.cpp.
References ASSERT_, ASSERT_ABOVE_, ASSERT_BELOW_, ASSERTMSG_, mrpt::maps::CPointsMap::boundingBox(), CLASS_ID, mrpt::poses::CPose3D::composePoint(), mrpt::maps::TMatchingExtraResults::correspondencesRatio, mrpt::utils::TRuntimeClassId::derivedFrom(), mrpt::utils::TMatchingPairList::filterUniqueRobustPairs(), mrpt::maps::CMetricMap::GetRuntimeClass(), mrpt::math::KDTreeCapable< CPointsMap >::kdTreeClosestPoint3D(), min, MRPT_END, MRPT_START, mrpt::maps::CPointsMap::size(), mrpt::math::square(), mrpt::maps::TMatchingExtraResults::sumSqrDist, mrpt::maps::CPointsMap::x, mrpt::maps::CPointsMap::y, and mrpt::maps::CPointsMap::z.
Referenced by mrpt::maps::CPointsMap::compute3DMatchingRatio(), and mrpt::slam::observationsOverlap().
◆ duplicate()
|
virtual |
Returns a copy of the object, indepently of its class.
Implements mrpt::utils::CObject.
◆ duplicateGetSmartPtr()
|
inlineinherited |
Returns a copy of the object, indepently of its class, as a smart pointer (the newly created object will exist as long as any copy of this smart pointer).
Definition at line 162 of file CObject.h.
References mrpt::utils::CObjectPtr.
Referenced by mrpt::obs::CRawlog::addActions(), mrpt::slam::CIncrementalMapPartitioner::addMapFrame(), and mrpt::obs::CRawlog::addObservations().
◆ empty()
|
inlineinherited |
STL-like method to check whether the map is empty:
Definition at line 596 of file maps/CPointsMap.h.
Referenced by mrpt::maps::CHeightGridMap2D_Base::dem_internal_insertObservation().
◆ enableFilterByHeight()
|
inlineinherited |
Enable/disable the filter-by-height functionality.
- See also
- setHeightFilterLevels
- Note
- Default upon construction is disabled.
Definition at line 649 of file maps/CPointsMap.h.
◆ extractCylinder()
|
inherited |
Extracts the points in the map within a cylinder in 3D defined the provided radius and zmin/zmax values.
Definition at line 1170 of file CPointsMap.cpp.
References mrpt::maps::CMetricMap::clear(), mrpt::maps::CPointsMap::insertPoint(), mrpt::math::square(), mrpt::math::TPoint2D::x, and mrpt::math::TPoint2D::y.
◆ extractPoints()
|
inherited |
Extracts the points in the map within the area defined by two corners.
The points are coloured according the R,G,B input data.
Definition at line 1183 of file CPointsMap.cpp.
References mrpt::maps::CMetricMap::clear(), mrpt::maps::CPointsMap::insertPoint(), min, R, mrpt::math::TPoint3D::x, mrpt::math::TPoint3D::y, and mrpt::math::TPoint3D::z.
◆ fuseWith()
|
inherited |
Insert the contents of another map into this one, fusing the previous content with the new one.
This means that points very close to existing ones will be "fused", rather than "added". This prevents the unbounded increase in size of these class of maps. NOTICE that "otherMap" is neither translated nor rotated here, so if this is desired it must done before calling this method.
- Parameters
-
otherMap The other map whose points are to be inserted into this one. minDistForFuse Minimum distance (in meters) between two points, each one in a map, to be considered the same one and be fused rather than added. notFusedPoints If a pointer is supplied, this list will contain at output a list with a "bool" value per point in "this" map. This will be false/true according to that point having been fused or not.
- See also
- loadFromRangeScan, addFrom
Definition at line 1928 of file CPointsMap.cpp.
References ASSERT_, mrpt::maps::CPointsMap::determineMatching2D(), mrpt::maps::CPointsMap::getPoint(), mrpt::maps::CPointsMap::insertPointFast(), mrpt::maps::CPointsMap::mark_as_modified(), mrpt::maps::CPointsMap::reserve(), mrpt::maps::CPointsMap::setPointWeight(), mrpt::maps::CPointsMap::size(), mrpt::math::square(), and mrpt::math::TPoint3D::x.
Referenced by mrpt::maps::CPointsMap::internal_insertObservation().
◆ getAllPoints() [1/4]
|
inlineinherited |
Gets all points as a STL-like container.
- Template Parameters
-
CONTAINER Any STL-like container of mrpt::math::TPoint3D, mrpt::math::TPoint3Df or anything having members x,y,z. Note that this method is not efficient for large point clouds. Fastest methods are getPointsBuffer() or getPointsBufferRef_x(), getPointsBufferRef_y(), getPointsBufferRef_z()
Definition at line 389 of file maps/CPointsMap.h.
◆ getAllPoints() [2/4]
|
inherited |
Returns a copy of the 2D/3D points as a std::vector of float coordinates.
If decimation is greater than 1, only 1 point out of that number will be saved in the output, effectively performing a subsampling of the points.
- See also
- setAllPoints
Definition at line 810 of file CPointsMap.cpp.
References ASSERT_, MRPT_END, MRPT_START, mrpt::maps::CPointsMap::x, and mrpt::maps::CPointsMap::y.
◆ getAllPoints() [3/4]
|
inlineinherited |
Definition at line 406 of file maps/CPointsMap.h.
◆ getAllPoints() [4/4]
|
inlineinherited |
Returns a copy of the 2D/3D points as a std::vector of float coordinates.
If decimation is greater than 1, only 1 point out of that number will be saved in the output, effectively performing a subsampling of the points.
- Template Parameters
-
VECTOR can be std::vector<float or double> or any row/column Eigen::Array or Eigen::Matrix (this includes mrpt::math::CVectorFloat and mrpt::math::CVectorDouble).
Definition at line 366 of file maps/CPointsMap.h.
References ASSERT_, MRPT_END, and MRPT_START.
◆ getAs3DObject()
|
virtualinherited |
Returns a 3D object representing the map.
The color of the points is given by the static variables: COLOR_3DSCENE_R,COLOR_3DSCENE_G,COLOR_3DSCENE_B
Implements mrpt::maps::CMetricMap.
Reimplemented in mrpt::maps::CColouredPointsMap.
Definition at line 750 of file CPointsMap.cpp.
References mrpt::maps::CPointsMap::COLOR_3DSCENE_B, mrpt::maps::CPointsMap::COLOR_3DSCENE_G, mrpt::maps::CPointsMap::COLOR_3DSCENE_R, mrpt::opengl::CPointCloud::Create(), mrpt::maps::TMapGenericParams::enableSaveAs3DObject, mrpt::maps::CMetricMap::genericMapParams, and mrpt::global_settings::POINTSMAPS_3DOBJECT_POINTSIZE.
Referenced by TEST_F(), and mrpt::graphslam::CGraphSlamEngine< GRAPH_T >::updateMapVisualization().
◆ getAsSimplePointsMap() [1/2]
|
inlinevirtual |
If the map is a simple points map or it's a multi-metric map that contains EXACTLY one simple points map, return it.
Otherwise, return NULL
Reimplemented from mrpt::maps::CPointsMap.
Definition at line 101 of file maps/CSimplePointsMap.h.
◆ getAsSimplePointsMap() [2/2]
|
inlinevirtual |
Reimplemented from mrpt::maps::CPointsMap.
Definition at line 102 of file maps/CSimplePointsMap.h.
◆ getHeightFilterLevels()
|
inlineinherited |
Get the min/max Z levels for points to be actually inserted in the map.
Definition at line 656 of file maps/CPointsMap.h.
◆ getLargestDistanceFromOrigin()
|
inherited |
This method returns the largest distance from the origin to any of the points, such as a sphere centered at the origin with this radius cover ALL the points in the map (the results are buffered, such as, if the map is not modified, the second call will be much faster than the first one).
Definition at line 786 of file CPointsMap.cpp.
References mrpt::maps::CPointsMap::m_largestDistanceFromOrigin, mrpt::maps::CPointsMap::m_largestDistanceFromOriginIsUpdated, and mrpt::math::square().
◆ getLargestDistanceFromOriginNoRecompute()
|
inlineinherited |
Like getLargestDistanceFromOrigin() but returns in output_is_valid = false if the distance was not already computed, skipping its computation then, unlike getLargestDistanceFromOrigin()
Definition at line 615 of file maps/CPointsMap.h.
◆ getLoadPLYErrorString()
|
inlineinherited |
Return a description of the error if loadFromPlyFile() returned false, or an empty string if the file was loaded without problems.
Definition at line 41 of file PLY_import_export.h.
◆ getPCLPointCloud()
|
inlineinherited |
Use to convert this MRPT point cloud object into a PCL point cloud object (PointCloud<PointXYZ>).
Usage example:
- See also
- setFromPCLPointCloud, CColouredPointsMap::getPCLPointCloudXYZRGB (for color data)
Definition at line 684 of file maps/CPointsMap.h.
Referenced by mrpt::maps::CPointsMap::loadPCDFile(), and mrpt::maps::CPointsMap::savePCDFile().
◆ getPoint() [1/7]
|
inherited |
This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts.
Definition at line 229 of file CPointsMap.cpp.
References ASSERT_BELOW_, and mrpt::maps::CPointsMap::getPointWeight().
◆ getPoint() [2/7]
|
inherited |
This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts.
Definition at line 238 of file CPointsMap.cpp.
References ASSERT_BELOW_, and mrpt::maps::CPointsMap::getPointWeight().
◆ getPoint() [3/7]
|
inherited |
This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts.
Definition at line 210 of file CPointsMap.cpp.
References ASSERT_BELOW_, and mrpt::maps::CPointsMap::getPointWeight().
◆ getPoint() [4/7]
|
inherited |
Access to a given point from map, as a 2D point.
First index is 0.
- Returns
- The return value is the weight of the point (the times it has been fused), or 1 if weights are not used.
- Exceptions
-
Throws std::exception on index out of bound.
- See also
- setPoint, getPointFast
Definition at line 219 of file CPointsMap.cpp.
References ASSERT_BELOW_, and mrpt::maps::CPointsMap::getPointWeight().
Referenced by mrpt::slam::CGridMapAligner::AlignPDF_robustMatch(), mrpt::maps::COccupancyGridMap2D::computeLikelihoodField_II(), mrpt::maps::COccupancyGridMap2D::computeLikelihoodField_Thrun(), mrpt::maps::COccupancyGridMap2D::computeObservationLikelihood_Consensus(), mrpt::maps::COccupancyGridMap2D::computeObservationLikelihood_ConsensusOWA(), mrpt::maps::CHeightGridMap2D_Base::dem_internal_insertObservation(), mrpt::maps::CPointsMap::fuseWith(), mrpt::maps::CPointsMap::internal_insertObservation(), and ransac_data_assoc_run().
◆ getPoint() [5/7]
|
inlinevirtualinherited |
Access to a given point from map, and its colors, if the map defines them (othersise, R=G=B=1.0).
First index is 0.
- Returns
- The return value is the weight of the point (the times it has been fused)
- Exceptions
-
Throws std::exception on index out of bound.
Reimplemented in mrpt::maps::CColouredPointsMap.
Definition at line 306 of file maps/CPointsMap.h.
References R.
◆ getPoint() [6/7]
|
inlineinherited |
This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts.
Definition at line 298 of file maps/CPointsMap.h.
References mrpt::maps::CPointsMap::getPoint().
Referenced by mrpt::maps::CPointsMap::getPoint().
◆ getPoint() [7/7]
|
inlineinherited |
This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts.
Definition at line 300 of file maps/CPointsMap.h.
References mrpt::maps::CPointsMap::getPoint().
Referenced by mrpt::maps::CPointsMap::getPoint().
◆ getPointAllFields()
|
inlineinherited |
Get all the data fields for one point as a vector: depending on the implementation class this can be [X Y Z] or [X Y Z R G B], etc...
Definition at line 458 of file maps/CPointsMap.h.
References ASSERT_BELOW_.
◆ getPointAllFieldsFast()
|
inlinevirtual |
Get all the data fields for one point as a vector: [X Y Z] Unlike getPointAllFields(), this method does not check for index out of bounds.
Implements mrpt::maps::CPointsMap.
Definition at line 58 of file maps/CSimplePointsMap.h.
◆ getPointFast()
|
inlineinherited |
Just like getPoint() but without checking out-of-bound index and without returning the point weight, just XYZ.
Definition at line 314 of file maps/CPointsMap.h.
Referenced by mrpt::maps::CPointCloudFilterByDistance::filter(), mrpt::utils::PointCloudAdapter< mrpt::maps::CColouredPointsMap >::getPointXYZ(), mrpt::utils::PointCloudAdapter< mrpt::maps::CPointsMap >::getPointXYZ(), mrpt::utils::PointCloudAdapter< mrpt::maps::CSimplePointsMap >::getPointXYZ(), mrpt::utils::PointCloudAdapter< mrpt::maps::CWeightedPointsMap >::getPointXYZ(), mrpt::maps::CPointsMap::insertAnotherMap(), mrpt::maps::COctoMapBase< octree_t, octree_node_t >::internal_build_PointCloud_for_observation(), and mrpt::maps::CColouredOctoMap::internal_insertObservation().
◆ getPointsBuffer()
|
inherited |
Provides a direct access to points buffer, or NULL if there is no points in the map.
Definition at line 252 of file CPointsMap.cpp.
References mrpt::maps::CPointsMap::size().
Referenced by mrpt::nav::CReactiveNavigationSystem::checkCollisionWithLatestObstacles(), mrpt::maps::COctoMapBase< octomap::ColorOcTree, octomap::ColorOcTreeNode >::getPointOccupancy(), mrpt::nav::CReactiveNavigationSystem3D::implementSenseObstacles(), mrpt::maps::CPointsMap::internal_insertObservation(), mrpt::nav::PlannerTPS_VirtualBase::spaceTransformer(), mrpt::nav::PlannerTPS_VirtualBase::spaceTransformerOneDirectionOnly(), mrpt::nav::CReactiveNavigationSystem::STEP3_WSpaceToTPSpace(), and mrpt::nav::PlannerTPS_VirtualBase::transformPointcloudWithSquareClipping().
◆ getPointsBufferRef_x()
|
inlineinherited |
Provides a direct access to a read-only reference of the internal point buffer.
- See also
- getAllPoints
Definition at line 354 of file maps/CPointsMap.h.
Referenced by mrpt::maps::COccupancyGridMap2D::determineMatching2D().
◆ getPointsBufferRef_y()
|
inlineinherited |
Provides a direct access to a read-only reference of the internal point buffer.
- See also
- getAllPoints
Definition at line 356 of file maps/CPointsMap.h.
Referenced by mrpt::maps::COccupancyGridMap2D::determineMatching2D().
◆ getPointsBufferRef_z()
|
inlineinherited |
Provides a direct access to a read-only reference of the internal point buffer.
- See also
- getAllPoints
Definition at line 358 of file maps/CPointsMap.h.
Referenced by mrpt::maps::COccupancyGridMap2D::determineMatching2D().
◆ getPointWeight()
|
inlinevirtualinherited |
Gets the point weight, which is ignored in all classes (defaults to 1) but in those which actually store that field (Note: No checks are done for out-of-bounds index).
- See also
- setPointWeight
Reimplemented in mrpt::maps::CWeightedPointsMap.
Definition at line 346 of file maps/CPointsMap.h.
References MRPT_UNUSED_PARAM.
Referenced by mrpt::maps::CPointsMap::getPoint().
◆ GetRuntimeClass()
|
virtual |
Returns information about the class of an object in runtime.
Reimplemented from mrpt::maps::CPointsMap.
◆ getSavePLYErrorString()
|
inlineinherited |
Return a description of the error if loadFromPlyFile() returned false, or an empty string if the file was loaded without problems.
Definition at line 87 of file PLY_import_export.h.
◆ hasColorPoints()
|
inlinevirtualinherited |
Returns true if the point map has a color field for each point.
Reimplemented in mrpt::maps::CColouredPointsMap.
Definition at line 317 of file maps/CPointsMap.h.
◆ hasSubscribers()
|
inlineprotectedinherited |
Can be called by a derived class before preparing an event for publishing with publishEvent to determine if there is no one subscribed, so it can save the wasted time preparing an event that will be not read.
Definition at line 52 of file CObservable.h.
Referenced by mrpt::gui::CWindowDialog::OnMouseDown(), mrpt::gui::CWindowDialog::OnMouseMove(), mrpt::gui::CWindowDialog::OnResize(), and mrpt::opengl::COpenGLViewport::render().
◆ insertAnotherMap()
|
inherited |
Insert the contents of another map into this one with some geometric transformation, without fusing close points.
- Parameters
-
otherMap The other map whose points are to be inserted into this one. otherPose The pose of the other map in the coordinates of THIS map
Definition at line 1618 of file CPointsMap.cpp.
References mrpt::maps::CPointsMap::addFrom_classSpecific(), mrpt::poses::CPose3D::composePoint(), mrpt::maps::CPointsMap::getPointFast(), mrpt::maps::CPointsMap::mark_as_modified(), mrpt::maps::CPointsMap::resize(), mrpt::maps::CPointsMap::setPointFast(), mrpt::maps::CPointsMap::size(), mrpt::math::TPoint3Df::x, mrpt::math::TPoint3Df::y, and mrpt::math::TPoint3Df::z.
Referenced by mrpt::nav::CReactiveNavigationSystem3D::loggingGetWSObstaclesAndShape().
◆ insertObservation()
|
inherited |
Insert the observation information into this map.
This method must be implemented in derived classes. See: Maps and observations compatibility matrix
- Parameters
-
obs The observation robotPose The 3D pose of the robot mobile base in the map reference system, or NULL (default) if you want to use the origin.
- See also
- CObservation::insertObservationInto
Definition at line 102 of file CMetricMap.cpp.
Referenced by ICPTests::align2scans(), mrpt::maps::COccupancyGridMap2D::computeObservationLikelihood_likelihoodField_Thrun(), mrpt::graphslam::deciders::CRangeScanOps< GRAPH_T >::getICPEdge(), CAngularObservationMesh_fnctr::operator()(), TEST(), and mrpt::graphslam::CGraphSlamEngine< GRAPH_T >::updateMapVisualization().
◆ insertObservationPtr()
|
inherited |
A wrapper for smart pointers, just calls the non-smart pointer version.
See: Maps and observations compatibility matrix
Definition at line 118 of file CMetricMap.cpp.
References MRPT_END, MRPT_START, and THROW_EXCEPTION.
Referenced by mrpt::slam::CMetricMapBuilderICP::processObservation().
◆ insertPoint() [1/3]
|
inlineinherited |
This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts.
Definition at line 421 of file maps/CPointsMap.h.
References mrpt::maps::CPointsMap::insertPoint().
Referenced by mrpt::maps::CPointsMap::insertPoint().
◆ insertPoint() [2/3]
|
inlinevirtualinherited |
overload (RGB data is ignored in classes without color information)
Reimplemented in mrpt::maps::CColouredPointsMap.
Definition at line 423 of file maps/CPointsMap.h.
References MRPT_UNUSED_PARAM, and R.
◆ insertPoint() [3/3]
|
inlineinherited |
Provides a way to insert (append) individual points into the map: the missing fields of child classes (color, weight, etc) are left to their default values.
Definition at line 419 of file maps/CPointsMap.h.
Referenced by mrpt::slam::CGridMapAligner::AlignPDF_robustMatch(), mrpt::maps::CPointsMap::extractCylinder(), mrpt::maps::CPointsMap::extractPoints(), mrpt::maps::COccupancyGridMap2D::getAsPointCloud(), mrpt::maps::CPointsMap::load2Dor3D_from_text_file(), and run_pc_filter_test().
◆ insertPointFast()
|
virtual |
The virtual method for insertPoint() without calling mark_as_modified()
Implements mrpt::maps::CPointsMap.
Definition at line 297 of file CSimplePointsMap.cpp.
◆ internal_canComputeObservationLikelihood()
|
inlineprivatevirtualinherited |
Internal method called by canComputeObservationLikelihood()
Reimplemented in mrpt::maps::CMultiMetricMap, and mrpt::maps::COccupancyGridMap2D.
Definition at line 71 of file maps/CMetricMap.h.
References MRPT_UNUSED_PARAM.
◆ internal_clear()
|
protectedvirtual |
Clear the map, erasing all the points.
Implements mrpt::maps::CMetricMap.
Definition at line 280 of file CSimplePointsMap.cpp.
References mrpt::utils::vector_strong_clear().
◆ internal_computeObservationLikelihood()
|
virtualinherited |
Internal method called by computeObservationLikelihood()
Implements mrpt::maps::CMetricMap.
Definition at line 1366 of file CPointsMap.cpp.
References mrpt::obs::CObservation2DRangeScan::buildAuxPointsMap(), CLASS_ID, mrpt::poses::CPose3D::composePoint(), mrpt::maps::CPointsMap::TLikelihoodOptions::decimation, mrpt::obs::CObservation::GetRuntimeClass(), mrpt::poses::CPose3D::isHorizontal(), mrpt::math::KDTreeCapable< CPointsMap >::kdTreeClosestPoint2D(), mrpt::math::KDTreeCapable< CPointsMap >::kdTreeClosestPoint3D(), mrpt::utils::keep_min(), mrpt::maps::CPointsMap::likelihoodOptions, mrpt::maps::CPointsMap::TLikelihoodOptions::max_corr_distance, mrpt::math::TPose2D::phi, mrpt::maps::CPointsMap::TLikelihoodOptions::sigma_dist, mrpt::maps::CPointsMap::size(), mrpt::math::square(), mrpt::math::TPose2D::x, mrpt::maps::CPointsMap::x, mrpt::math::TPose2D::y, mrpt::maps::CPointsMap::y, and mrpt::maps::CPointsMap::z.
◆ internal_CreateFromMapDefinition()
|
static |
Definition at line 44 of file CSimplePointsMap.cpp.
References mrpt::maps::CSimplePointsMap::TMapDefinition::insertionOpts, and mrpt::maps::CSimplePointsMap::TMapDefinition::likelihoodOpts.
◆ internal_insertObservation()
|
protectedvirtualinherited |
This is a common version of CMetricMap::insertObservation() for point maps (actually, CMetricMap::internal_insertObservation), so derived classes don't need to worry implementing that method unless something special is really necesary.
See mrpt::maps::CPointsMap for the enumeration of types of observations which are accepted.
Implements mrpt::maps::CMetricMap.
Definition at line 1679 of file CPointsMap.cpp.
References mrpt::obs::gnss::a1, mrpt::obs::gnss::a2, mrpt::maps::CPointsMap::TInsertionOptions::addToExistingPointsMap, mrpt::maps::CPointsMap::applyDeletionMask(), mrpt::obs::CObservationRange::begin(), mrpt::poses::CPose3D::composePoint(), mrpt::maps::CPointsMap::TInsertionOptions::disableDeletion, mrpt::obs::CObservationRange::end(), mrpt::maps::CPointsMap::fuseWith(), mrpt::maps::CPointsMap::TInsertionOptions::fuseWithExisting, mrpt::obs::CObservationVelodyneScan::generatePointCloud(), mrpt::maps::CPointsMap::getPoint(), mrpt::maps::CPointsMap::getPointsBuffer(), mrpt::maps::CPointsMap::TInsertionOptions::horizontalTolerance, mrpt::maps::CPointsMap::insertionOptions, mrpt::maps::CPointsMap::insertPointFast(), IS_CLASS, mrpt::maps::CPointsMap::TInsertionOptions::isPlanarMap, mrpt::obs::CObservation2DRangeScan::isPlanarScan(), loadFromRangeScan(), mrpt::maps::CPointsMap::loadFromRangeScan(), mrpt::maps::CPointsMap::loadFromVelodyneScan(), mrpt::maps::CPointsMap::mark_as_modified(), mrpt::obs::CObservationRange::maxSensorDistance, mrpt::maps::CPointsMap::TInsertionOptions::minDistBetweenLaserPoints, MRPT_END, MRPT_START, mrpt::obs::CObservationVelodyneScan::point_cloud, mrpt::math::CPolygon::PointIntoPolygon(), mrpt::maps::CPointsMap::reserve(), mrpt::utils::round(), mrpt::obs::CObservationRange::sensedData, mrpt::obs::CObservationRange::sensorConeApperture, mrpt::math::CPolygon::setAllVertices(), mrpt::maps::CPointsMap::size(), mrpt::obs::CObservationVelodyneScan::TPointCloud::size(), mrpt::math::TPoint3D::x, mrpt::maps::CPointsMap::x, mrpt::math::TPoint3D::y, mrpt::maps::CPointsMap::y, and mrpt::math::TPoint3D::z.
◆ internal_observer_begin()
Definition at line 33 of file CObservable.cpp.
◆ internal_observer_end()
Definition at line 38 of file CObservable.cpp.
References ASSERTMSG_, MRPT_END, and MRPT_START.
◆ isEmpty()
|
virtualinherited |
Returns true if the map is empty/no observation has been inserted.
Implements mrpt::maps::CMetricMap.
Definition at line 603 of file CPointsMap.cpp.
Referenced by mrpt::slam::CICP::ICP3D_Method_Classic().
◆ isFilterByHeightEnabled()
|
inlineinherited |
Return whether filter-by-height is enabled.
- See also
- enableFilterByHeight
Definition at line 651 of file maps/CPointsMap.h.
◆ kdtree_distance()
|
inlineinherited |
Returns the distance between the vector "p1[0:size-1]" and the data point with index "idx_p2" stored in the class:
Definition at line 735 of file maps/CPointsMap.h.
◆ kdtree_get_bbox()
|
inlineinherited |
Definition at line 756 of file maps/CPointsMap.h.
◆ kdtree_get_point_count()
|
inlineinherited |
Must return the number of data points.
Definition at line 725 of file maps/CPointsMap.h.
◆ kdtree_get_pt()
|
inlineinherited |
Returns the dim'th component of the idx'th point in the class:
Definition at line 728 of file maps/CPointsMap.h.
◆ kdtree_mark_as_outdated()
|
inlineprotectedinherited |
To be called by child classes when KD tree data changes.
Definition at line 672 of file KDTreeCapable.h.
◆ kdTreeClosestPoint2D() [1/3]
|
inlineinherited |
This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts.
Definition at line 167 of file KDTreeCapable.h.
◆ kdTreeClosestPoint2D() [2/3]
|
inlineinherited |
This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts.
Definition at line 144 of file KDTreeCapable.h.
◆ kdTreeClosestPoint2D() [3/3]
|
inlineinherited |
KD Tree-based search for the closest point (only ONE) to some given 2D coordinates.
This method automatically build the "m_kdtree_data" structure when:
- It is called for the first time
- The map has changed
- The KD-tree was build for 3D.
- Parameters
-
x0 The X coordinate of the query. y0 The Y coordinate of the query. out_x The X coordinate of the found closest correspondence. out_y The Y coordinate of the found closest correspondence. out_dist_sqr The square distance between the query and the returned point.
- Returns
- The index of the closest point in the map array.
Definition at line 114 of file KDTreeCapable.h.
◆ kdTreeClosestPoint2DsqrError() [1/2]
|
inlineinherited |
Definition at line 186 of file KDTreeCapable.h.
◆ kdTreeClosestPoint2DsqrError() [2/2]
|
inlineinherited |
Like kdTreeClosestPoint2D, but just return the square error from some point to its closest neighbor.
Definition at line 177 of file KDTreeCapable.h.
◆ kdTreeClosestPoint3D() [1/3]
|
inlineinherited |
This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts.
Definition at line 432 of file KDTreeCapable.h.
◆ kdTreeClosestPoint3D() [2/3]
|
inlineinherited |
This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts.
Definition at line 406 of file KDTreeCapable.h.
◆ kdTreeClosestPoint3D() [3/3]
|
inlineinherited |
KD Tree-based search for the closest point (only ONE) to some given 3D coordinates.
This method automatically build the "m_kdtree_data" structure when:
- It is called for the first time
- The map has changed
- The KD-tree was build for 2D.
- Parameters
-
x0 The X coordinate of the query. y0 The Y coordinate of the query. z0 The Z coordinate of the query. out_x The X coordinate of the found closest correspondence. out_y The Y coordinate of the found closest correspondence. out_z The Z coordinate of the found closest correspondence. out_dist_sqr The square distance between the query and the returned point.
- Returns
- The index of the closest point in the map array.
- See also
- kdTreeClosestPoint2D
Definition at line 372 of file KDTreeCapable.h.
◆ kdTreeNClosestPoint2D() [1/2]
|
inlineinherited |
Definition at line 304 of file KDTreeCapable.h.
◆ kdTreeNClosestPoint2D() [2/2]
|
inlineinherited |
KD Tree-based search for the N closest point to some given 2D coordinates.
This method automatically build the "m_kdtree_data" structure when:
- It is called for the first time
- The map has changed
- The KD-tree was build for 3D.
- Parameters
-
x0 The X coordinate of the query. y0 The Y coordinate of the query. N The number of closest points to search. out_x The vector containing the X coordinates of the correspondences. out_y The vector containing the Y coordinates of the correspondences. out_dist_sqr The vector containing the square distance between the query and the returned points.
- Returns
- The list of indices
Definition at line 271 of file KDTreeCapable.h.
◆ kdTreeNClosestPoint2DIdx() [1/2]
|
inlineinherited |
Definition at line 351 of file KDTreeCapable.h.
◆ kdTreeNClosestPoint2DIdx() [2/2]
|
inlineinherited |
KD Tree-based search for the N closest point to some given 2D coordinates and returns their indexes.
This method automatically build the "m_kdtree_data" structure when:
- It is called for the first time
- The map has changed
- The KD-tree was build for 3D.
- Parameters
-
x0 The X coordinate of the query. y0 The Y coordinate of the query. N The number of closest points to search. out_idx The indexes of the found closest correspondence. out_dist_sqr The square distance between the query and the returned point.
- See also
- kdTreeClosestPoint2D
Definition at line 329 of file KDTreeCapable.h.
◆ kdTreeNClosestPoint3D() [1/2]
|
inlineinherited |
Definition at line 551 of file KDTreeCapable.h.
◆ kdTreeNClosestPoint3D() [2/2]
|
inlineinherited |
KD Tree-based search for the N closest points to some given 3D coordinates.
This method automatically build the "m_kdtree_data" structure when:
- It is called for the first time
- The map has changed
- The KD-tree was build for 2D.
- Parameters
-
x0 The X coordinate of the query. y0 The Y coordinate of the query. z0 The Z coordinate of the query. N The number of closest points to search. out_x The vector containing the X coordinates of the correspondences. out_y The vector containing the Y coordinates of the correspondences. out_z The vector containing the Z coordinates of the correspondences. out_dist_sqr The vector containing the square distance between the query and the returned points.
- See also
- kdTreeNClosestPoint2D
Definition at line 458 of file KDTreeCapable.h.
◆ kdTreeNClosestPoint3DIdx() [1/2]
|
inlineinherited |
Definition at line 664 of file KDTreeCapable.h.
◆ kdTreeNClosestPoint3DIdx() [2/2]
|
inlineinherited |
KD Tree-based search for the N closest point to some given 3D coordinates and returns their indexes.
This method automatically build the "m_kdtree_data" structure when:
- It is called for the first time
- The map has changed
- The KD-tree was build for 2D.
- Parameters
-
x0 The X coordinate of the query. y0 The Y coordinate of the query. z0 The Z coordinate of the query. N The number of closest points to search. out_idx The indexes of the found closest correspondence. out_dist_sqr The square distance between the query and the returned point.
- See also
- kdTreeClosestPoint2D, kdTreeRadiusSearch3D
Definition at line 640 of file KDTreeCapable.h.
◆ kdTreeNClosestPoint3DWithIdx()
|
inlineinherited |
KD Tree-based search for the N closest points to some given 3D coordinates.
This method automatically build the "m_kdtree_data" structure when:
- It is called for the first time
- The map has changed
- The KD-tree was build for 2D.
- Parameters
-
x0 The X coordinate of the query. y0 The Y coordinate of the query. z0 The Z coordinate of the query. N The number of closest points to search. out_x The vector containing the X coordinates of the correspondences. out_y The vector containing the Y coordinates of the correspondences. out_z The vector containing the Z coordinates of the correspondences. out_idx The vector containing the indexes of the correspondences. out_dist_sqr The vector containing the square distance between the query and the returned points.
- See also
- kdTreeNClosestPoint2D
Definition at line 513 of file KDTreeCapable.h.
◆ kdTreeRadiusSearch2D()
|
inlineinherited |
KD Tree-based search for all the points within a given radius of some 2D point.
This method automatically build the "m_kdtree_data" structure when:
- It is called for the first time
- The map has changed
- The KD-tree was build for 3D.
- Parameters
-
x0 The X coordinate of the query. y0 The Y coordinate of the query. maxRadiusSqr The square of the desired search radius. out_indices_dist The output list, with pairs of indeces/squared distances for the found correspondences.
- Returns
- Number of found points.
Definition at line 608 of file KDTreeCapable.h.
◆ kdTreeRadiusSearch3D()
|
inlineinherited |
KD Tree-based search for all the points within a given radius of some 3D point.
This method automatically build the "m_kdtree_data" structure when:
- It is called for the first time
- The map has changed
- The KD-tree was build for 2D.
- Parameters
-
x0 The X coordinate of the query. y0 The Y coordinate of the query. z0 The Z coordinate of the query. maxRadiusSqr The square of the desired search radius. out_indices_dist The output list, with pairs of indeces/squared distances for the found correspondences.
- Returns
- Number of found points.
Definition at line 577 of file KDTreeCapable.h.
◆ kdTreeTwoClosestPoint2D() [1/2]
|
inlineinherited |
Definition at line 244 of file KDTreeCapable.h.
◆ kdTreeTwoClosestPoint2D() [2/2]
|
inlineinherited |
KD Tree-based search for the TWO closest point to some given 2D coordinates.
This method automatically build the "m_kdtree_data" structure when:
- It is called for the first time
- The map has changed
- The KD-tree was build for 3D.
- Parameters
-
x0 The X coordinate of the query. y0 The Y coordinate of the query. out_x1 The X coordinate of the first correspondence. out_y1 The Y coordinate of the first correspondence. out_x2 The X coordinate of the second correspondence. out_y2 The Y coordinate of the second correspondence. out_dist_sqr1 The square distance between the query and the first returned point. out_dist_sqr2 The square distance between the query and the second returned point.
- See also
- kdTreeClosestPoint2D
Definition at line 207 of file KDTreeCapable.h.
◆ load2D_from_text_file()
|
inlineinherited |
Load from a text file.
Each line should contain an "X Y" coordinate pair, separated by whitespaces. Returns false if any error occured, true elsewere.
Definition at line 245 of file maps/CPointsMap.h.
◆ load2Dor3D_from_text_file()
|
inherited |
2D or 3D generic implementation of load2D_from_text_file and load3D_from_text_file
Definition at line 127 of file CPointsMap.cpp.
References mrpt::maps::CMetricMap::clear(), mrpt::system::os::fclose(), mrpt::system::os::fopen(), mrpt::maps::CPointsMap::insertPoint(), mrpt::maps::CPointsMap::mark_as_modified(), MRPT_END, and MRPT_START.
◆ load3D_from_text_file()
|
inlineinherited |
Load from a text file.
Each line should contain an "X Y Z" coordinate tuple, separated by whitespaces. Returns false if any error occured, true elsewere.
Definition at line 250 of file maps/CPointsMap.h.
◆ loadFromPlyFile()
|
inherited |
Loads from a PLY file.
- Parameters
-
[in] filename The filename to open. It can be either in binary or text format. [out] file_comments If provided (!=NULL) the list of comment strings stored in the file will be returned. [out] file_obj_info If provided (!=NULL) the list of "object info" strings stored in the file will be returned.
- Returns
- false on any error in the file format or reading it. To obtain more details on the error you can call getLoadPLYErrorString()
Definition at line 1893 of file PLY_import_export.cpp.
References TVertex::b, TVertex::g, TVertex::intensity, ply_close(), ply_get_comments(), ply_get_element(), ply_get_element_description(), ply_get_obj_info(), ply_get_property(), ply_open_for_reading(), TVertex::r, VAL_NOT_SET, version, vert_props, TVertex::x, TVertex::y, and TVertex::z.
◆ loadFromProbabilisticPosesAndObservations()
|
inherited |
Load the map contents from a CSimpleMap object, erasing all previous content of the map.
This is automaticed invoking "insertObservation" for each observation at the mean 3D robot pose as given by the "poses::CPosePDF" in the CSimpleMap object.
- See also
- insertObservation, CSimpleMap
- Exceptions
-
std::exception Some internal steps in invoked methods can raise exceptions on invalid parameters, etc...
Definition at line 48 of file CMetricMap.cpp.
References mrpt::utils::clear(), mrpt::maps::CSimpleMap::get(), and mrpt::maps::CSimpleMap::size().
Referenced by run_test_pf_localization().
◆ loadFromRangeScan() [1/2]
|
virtual |
See CPointsMap::loadFromRangeScan()
Implements mrpt::maps::CPointsMap.
Definition at line 361 of file CSimplePointsMap.cpp.
References mrpt::maps::detail::loadFromRangeImpl< Derived >::templ_loadFromRangeScan().
Referenced by mrpt::maps::CPointsMap::internal_insertObservation(), and run_rnav_test().
◆ loadFromRangeScan() [2/2]
|
virtual |
See CPointsMap::loadFromRangeScan()
Implements mrpt::maps::CPointsMap.
Definition at line 369 of file CSimplePointsMap.cpp.
References mrpt::maps::detail::loadFromRangeImpl< Derived >::templ_loadFromRangeScan().
◆ loadFromSimpleMap()
|
inlineinherited |
Load the map contents from a CSimpleMap object, erasing all previous content of the map.
This is automaticed invoking "insertObservation" for each observation at the mean 3D robot pose as given by the "poses::CPosePDF" in the CSimpleMap object.
- See also
- insertObservation, CSimpleMap
- Exceptions
-
std::exception Some internal steps in invoked methods can raise exceptions on invalid parameters, etc...
Definition at line 105 of file maps/CMetricMap.h.
Referenced by mrpt::maps::CRandomFieldGridMap2D::internal_clear().
◆ loadFromVelodyneScan()
|
inherited |
Like loadFromRangeScan() for Velodyne 3D scans.
Points are translated and rotated according to the sensorPose field in the observation and, if provided, to the robotPose parameter.
- Parameters
-
scan The Raw LIDAR data to be inserted into this map. It MUST contain point cloud data, generated by calling to mrpt::obs::CObservationVelodyneScan::generatePointCloud() prior to insertion in this map. robotPose Default to (0,0,0|0deg,0deg,0deg). Changes the frame of reference for the point cloud (i.e. the vehicle/robot pose in world coordinates).
- See also
- loadFromRangeScan
Definition at line 2019 of file CPointsMap.cpp.
References mrpt::maps::CPointsMap::TInsertionOptions::addToExistingPointsMap, ASSERT_EQUAL_, mrpt::poses::CPose3D::getHomogeneousMatrix(), mrpt::maps::CPointsMap::insertionOptions, mrpt::obs::CObservationVelodyneScan::TPointCloud::intensity, mrpt::maps::CPointsMap::mark_as_modified(), mrpt::obs::CObservationVelodyneScan::point_cloud, mrpt::maps::CPointsMap::resize(), mrpt::obs::CObservationVelodyneScan::sensorPose, mrpt::maps::CPointsMap::setPoint(), mrpt::maps::CPointsMap::size(), mrpt::obs::CObservationVelodyneScan::TPointCloud::size(), mrpt::obs::CObservationVelodyneScan::TPointCloud::x, mrpt::obs::CObservationVelodyneScan::TPointCloud::y, and mrpt::obs::CObservationVelodyneScan::TPointCloud::z.
Referenced by mrpt::maps::CHeightGridMap2D_Base::dem_internal_insertObservation(), and mrpt::maps::CPointsMap::internal_insertObservation().
◆ loadPCDFile()
|
virtualinherited |
Load the point cloud from a PCL PCD file (requires MRPT built against PCL)
- Returns
- false on any error
Definition at line 1570 of file CPointsMap.cpp.
References mrpt::maps::CPointsMap::getPCLPointCloud(), MRPT_UNUSED_PARAM, and THROW_EXCEPTION.
◆ MapDefinition()
|
static |
Returns default map definition initializer.
See mrpt::maps::TMetricMapInitializer
Definition at line 26 of file CSimplePointsMap.cpp.
◆ mark_as_modified()
|
inlineinherited |
Users normally don't need to call this.
Called by this class or children classes, set m_largestDistanceFromOriginIsUpdated=false, invalidates the kd-tree cache, and such.
Definition at line 771 of file maps/CPointsMap.h.
Referenced by mrpt::maps::CPointsMap::addFrom(), mrpt::maps::CPointsMap::applyDeletionMask(), mrpt::maps::CPointsMap::changeCoordinatesReference(), mrpt::maps::CPointsMap::clipOutOfRange(), mrpt::maps::CPointsMap::clipOutOfRangeInZ(), mrpt::maps::CPointsMap::CPointsMap(), mrpt::maps::CPointsMap::fuseWith(), mrpt::maps::CPointsMap::insertAnotherMap(), mrpt::maps::CPointsMap::internal_insertObservation(), mrpt::maps::CPointsMap::load2Dor3D_from_text_file(), and mrpt::maps::CPointsMap::loadFromVelodyneScan().
◆ OnPostSuccesfulInsertObs()
|
inlineprivatevirtualinherited |
Hook for each time a "internal_insertObservation" returns "true" This is called automatically from insertObservation() when internal_insertObservation returns true.
Reimplemented in mrpt::maps::COccupancyGridMap2D.
Definition at line 79 of file maps/CMetricMap.h.
◆ operator delete() [1/3]
Definition at line 36 of file maps/CSimplePointsMap.h.
◆ operator delete() [2/3]
Definition at line 36 of file maps/CSimplePointsMap.h.
◆ operator delete() [3/3]
|
inline | ||||||||||||||||||||
Definition at line 36 of file maps/CSimplePointsMap.h.
◆ operator delete[]()
Definition at line 36 of file maps/CSimplePointsMap.h.
◆ operator new() [1/3]
|
inline |
Definition at line 36 of file maps/CSimplePointsMap.h.
◆ operator new() [2/3]
|
inline | ||||||||||||||||||||
Definition at line 36 of file maps/CSimplePointsMap.h.
◆ operator new() [3/3]
Definition at line 36 of file maps/CSimplePointsMap.h.
◆ operator new[]()
|
inline |
Definition at line 36 of file maps/CSimplePointsMap.h.
◆ operator+=()
|
inlineinherited |
This operator is synonymous with addFrom.
- See also
- addFrom
Definition at line 224 of file maps/CPointsMap.h.
◆ PLY_export_get_face_count()
|
inlineprotectedvirtualinherited |
In a base class, return the number of faces.
Implements mrpt::utils::PLY_Exporter.
Definition at line 819 of file maps/CPointsMap.h.
◆ PLY_export_get_vertex()
|
protectedvirtualinherited |
In a base class, will be called after PLY_export_get_vertex_count() once for each exported point.
- Parameters
-
pt_color Will be NULL if the loaded file does not provide color info.
Implements mrpt::utils::PLY_Exporter.
Reimplemented in mrpt::maps::CColouredPointsMap.
Definition at line 1516 of file CPointsMap.cpp.
References MRPT_UNUSED_PARAM, mrpt::math::TPoint3Df::x, mrpt::math::TPoint3Df::y, and mrpt::math::TPoint3Df::z.
◆ PLY_export_get_vertex_count()
|
protectedvirtualinherited |
In a base class, return the number of vertices.
Implements mrpt::utils::PLY_Exporter.
Definition at line 1508 of file CPointsMap.cpp.
References mrpt::maps::CPointsMap::size().
◆ PLY_import_set_face_count()
|
inlineprotectedvirtualinherited |
In a base class, reserve memory to prepare subsequent calls to PLY_import_set_face.
Implements mrpt::utils::PLY_Importer.
Definition at line 808 of file maps/CPointsMap.h.
References MRPT_UNUSED_PARAM.
◆ PLY_import_set_vertex()
|
protectedvirtualinherited |
In a base class, will be called after PLY_import_set_vertex_count() once for each loaded point.
- Parameters
-
pt_color Will be NULL if the loaded file does not provide color info.
Implements mrpt::utils::PLY_Importer.
Reimplemented in mrpt::maps::CColouredPointsMap.
Definition at line 1501 of file CPointsMap.cpp.
References MRPT_UNUSED_PARAM, mrpt::maps::CPointsMap::setPoint(), mrpt::math::TPoint3Df::x, mrpt::math::TPoint3Df::y, and mrpt::math::TPoint3Df::z.
◆ PLY_import_set_vertex_count()
|
protectedvirtual |
In a base class, reserve memory to prepare subsequent calls to PLY_import_set_vertex.
Implements mrpt::utils::PLY_Importer.
Definition at line 379 of file CSimplePointsMap.cpp.
References setSize().
◆ publishEvent()
Called when you want this object to emit an event to all the observers currently subscribed to this object.
Definition at line 49 of file CObservable.cpp.
References MRPT_END, and MRPT_START.
Referenced by mrpt::gui::CDisplayWindow3D::internal_emitGrabImageEvent(), mrpt::gui::CWindowDialog::OnChar(), mrpt::gui::CWindowDialog::OnClose(), mrpt::gui::C3DWindowDialog::OnClose(), mrpt::gui::CWindowDialog::OnMouseDown(), mrpt::gui::CWindowDialog::OnMouseMove(), mrpt::gui::CWindowDialog::OnResize(), mrpt::gui::C3DWindowDialog::OnResize(), and mrpt::opengl::COpenGLViewport::render().
◆ readFromStream()
|
protectedvirtual |
Introduces a pure virtual method responsible for loading from a CStream This can not be used directly be users, instead use "stream >> object;" for reading it from a stream or "stream >> object_ptr;" if the class is unknown apriori.
- Parameters
-
in The input binary stream where the object data must read from. version The version of the object stored in the stream: use this version number in your code to know how to read the incoming data.
- Exceptions
-
std::exception On any error, see CStream::ReadBuffer
- See also
- CStream
Implements mrpt::utils::CSerializable.
Definition at line 150 of file CSimplePointsMap.cpp.
References MRPT_THROW_UNKNOWN_SERIALIZATION_VERSION, and version.
◆ rebuild_kdTree_2D()
|
inlineprivateinherited |
Rebuild, if needed the KD-tree for 2D (nDims=2), 3D (nDims=3), ... asking the child class for the data points.
Definition at line 712 of file KDTreeCapable.h.
◆ rebuild_kdTree_3D()
|
inlineprivateinherited |
Rebuild, if needed the KD-tree for 2D (nDims=2), 3D (nDims=3), ... asking the child class for the data points.
Definition at line 737 of file KDTreeCapable.h.
◆ reserve()
|
virtual |
Reserves memory for a given number of points: the size of the map does not change, it only reserves the memory.
This is useful for situations where it is approximately known the final size of the map. This method is more efficient than constantly increasing the size of the buffers. Refer to the STL C++ library's "reserve" methods.
Implements mrpt::maps::CPointsMap.
Definition at line 75 of file CSimplePointsMap.cpp.
References mrpt::utils::length2length4N().
Referenced by mrpt::slam::CGridMapAligner::AlignPDF_robustMatch(), and mrpt::maps::COccupancyGridMap2D::getAsPointCloud().
◆ resize()
|
virtual |
Resizes all point buffers so they can hold the given number of points: newly created points are set to default values, and old contents are not changed.
- See also
- reserve, setPoint, setPointFast, setSize
Implements mrpt::maps::CPointsMap.
Definition at line 86 of file CSimplePointsMap.cpp.
Referenced by ransac_data_assoc_run(), and mrpt::utils::PointCloudAdapter< mrpt::maps::CSimplePointsMap >::resize().
◆ save2D_to_text_file()
|
inherited |
Save to a text file.
Each line will contain "X Y" point coordinates. Returns false if any error occured, true elsewere.
Definition at line 92 of file CPointsMap.cpp.
References mrpt::system::os::fclose(), mrpt::system::os::fopen(), and mrpt::system::os::fprintf().
◆ save3D_to_text_file()
|
inherited |
Save to a text file.
Each line will contain "X Y Z" point coordinates. Returns false if any error occured, true elsewere.
Definition at line 109 of file CPointsMap.cpp.
References mrpt::system::os::fclose(), mrpt::system::os::fopen(), and mrpt::system::os::fprintf().
◆ saveMetricMapRepresentationToFile()
|
inlinevirtualinherited |
This virtual method saves the map to a file "filNamePrefix"+< some_file_extension >, as an image or in any other applicable way (Notice that other methods to save the map may be implemented in classes implementing this virtual interface)
Implements mrpt::maps::CMetricMap.
Definition at line 266 of file maps/CPointsMap.h.
◆ savePCDFile()
|
virtualinherited |
Save the point cloud as a PCL PCD file, in either ASCII or binary format (requires MRPT built against PCL)
Save the point cloud as a PCL PCD file, in either ASCII or binary format.
- Returns
- false on any error
Reimplemented in mrpt::maps::CColouredPointsMap.
Definition at line 1554 of file CPointsMap.cpp.
References mrpt::maps::CPointsMap::getPCLPointCloud(), MRPT_UNUSED_PARAM, and THROW_EXCEPTION.
◆ saveToPlyFile()
|
inherited |
Saves to a PLY file.
- Parameters
-
[in] filename The filename to be saved. [in] file_comments If provided (!=NULL) the list of comment strings stored in the file will be returned. [in] file_obj_info If provided (!=NULL) the list of "object info" strings stored in the file will be returned.
- Returns
- false on any error writing the file. To obtain more details on the error you can call getSavePLYErrorString()
Definition at line 1993 of file PLY_import_export.cpp.
References mrpt::utils::TColorf::B, face_props, mrpt::utils::TColorf::G, TVertex::intensity, PLY_ASCII, PLY_BINARY_BE, PLY_BINARY_LE, ply_close(), ply_describe_property(), ply_element_count(), ply_header_complete(), ply_open_for_writing(), ply_put_comment(), ply_put_element(), ply_put_element_setup(), ply_put_obj_info(), mrpt::utils::TColorf::R, mrpt::utils::CStringList::size(), version, vert_props, mrpt::math::TPoint3Df::x, TVertex::x, mrpt::math::TPoint3Df::y, TVertex::y, mrpt::math::TPoint3Df::z, and TVertex::z.
◆ setAllPoints() [1/2]
|
inlineinherited |
Set all the points at once from vectors with X and Y coordinates (Z=0).
- See also
- getAllPoints
Definition at line 451 of file maps/CPointsMap.h.
◆ setAllPoints() [2/2]
|
inlineinherited |
Set all the points at once from vectors with X,Y and Z coordinates.
- See also
- getAllPoints
Definition at line 446 of file maps/CPointsMap.h.
Referenced by mrpt::detectors::CFaceDetection::experimental_viewFacePointsAndEigenVects(), mrpt::detectors::CFaceDetection::experimental_viewFacePointsScanned(), and mrpt::detectors::CFaceDetection::experimental_viewRegions().
◆ setAllPointsTemplate()
|
inlineinherited |
Set all the points at once from vectors with X,Y and Z coordinates (if Z is not provided, it will be set to all zeros).
- Template Parameters
-
VECTOR can be mrpt::math::CVectorFloat or std::vector<float> or any other column or row Eigen::Matrix.
Definition at line 433 of file maps/CPointsMap.h.
References ASSERT_, ASSERT_EQUAL_, and setSize().
◆ setFromPCLPointCloud()
|
inlineinherited |
Loads a PCL point cloud into this MRPT class (note: this method ignores potential RGB information, see CColouredPointsMap::setFromPCLPointCloudRGB() ).
Usage example:
Definition at line 710 of file maps/CPointsMap.h.
References mrpt::utils::clear().
◆ setHeightFilterLevels()
|
inlineinherited |
Set the min/max Z levels for points to be actually inserted in the map (only if enableFilterByHeight() was called before).
Definition at line 654 of file maps/CPointsMap.h.
◆ setPoint() [1/5]
|
inlineinherited |
This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts.
Definition at line 328 of file maps/CPointsMap.h.
References mrpt::maps::CPointsMap::setPoint().
Referenced by mrpt::maps::CPointsMap::setPoint().
◆ setPoint() [2/5]
|
inlineinherited |
This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts.
Definition at line 330 of file maps/CPointsMap.h.
References mrpt::maps::CPointsMap::setPoint().
Referenced by mrpt::maps::CPointsMap::setPoint().
◆ setPoint() [3/5]
|
inlineinherited |
This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts.
Definition at line 332 of file maps/CPointsMap.h.
References mrpt::maps::CPointsMap::setPoint().
Referenced by mrpt::maps::CPointsMap::setPoint().
◆ setPoint() [4/5]
|
inlineinherited |
Changes a given point from map, with Z defaulting to 0 if not provided.
- Exceptions
-
Throws std::exception on index out of bound.
Definition at line 322 of file maps/CPointsMap.h.
References ASSERT_BELOW_.
Referenced by mrpt::maps::CPointsMap::loadFromVelodyneScan(), mrpt::maps::CPointsMap::PLY_import_set_vertex(), and ransac_data_assoc_run().
◆ setPoint() [5/5]
|
inlinevirtualinherited |
overload (RGB data is ignored in classes without color information)
Reimplemented in mrpt::maps::CColouredPointsMap.
Definition at line 334 of file maps/CPointsMap.h.
References MRPT_UNUSED_PARAM, and R.
◆ setPointAllFields()
|
inlineinherited |
Set all the data fields for one point as a vector: depending on the implementation class this can be [X Y Z] or [X Y Z R G B], etc...
Unlike setPointAllFields(), this method does not check for index out of bounds
Definition at line 467 of file maps/CPointsMap.h.
References ASSERT_BELOW_.
◆ setPointAllFieldsFast()
|
inlinevirtual |
Set all the data fields for one point as a vector: [X Y Z] Unlike setPointAllFields(), this method does not check for index out of bounds.
Implements mrpt::maps::CPointsMap.
Definition at line 68 of file maps/CSimplePointsMap.h.
References ASSERTDEB_.
◆ setPointFast()
|
virtual |
Changes the coordinates of the given point (0-based index), without checking for out-of-bounds and without calling mark_as_modified()
- See also
- setPoint
Implements mrpt::maps::CPointsMap.
Definition at line 290 of file CSimplePointsMap.cpp.
Referenced by mrpt::utils::PointCloudAdapter< mrpt::maps::CSimplePointsMap >::setPointXYZ().
◆ setPointWeight()
|
inlinevirtualinherited |
Sets the point weight, which is ignored in all classes but those which actually store that field (Note: No checks are done for out-of-bounds index).
- See also
- getPointWeight
Reimplemented in mrpt::maps::CWeightedPointsMap.
Definition at line 341 of file maps/CPointsMap.h.
References MRPT_UNUSED_PARAM.
Referenced by mrpt::maps::CPointsMap::fuseWith().
◆ setSize()
|
virtual |
Resizes all point buffers so they can hold the given number of points, erasing all previous contents and leaving all points to default values.
- See also
- reserve, setPoint, setPointFast, setSize
Implements mrpt::maps::CPointsMap.
Definition at line 97 of file CSimplePointsMap.cpp.
◆ size()
|
inlineinherited |
Returns the number of stored points in the map.
Definition at line 283 of file maps/CPointsMap.h.
Referenced by mrpt::maps::CPointsMap::addFrom(), mrpt::maps::CColouredPointsMap::addFrom_classSpecific(), mrpt::maps::CWeightedPointsMap::addFrom_classSpecific(), mrpt::maps::CPointsMap::applyDeletionMask(), mrpt::maps::CPointsMap::clipOutOfRange(), mrpt::maps::CPointsMap::clipOutOfRangeInZ(), mrpt::maps::CPointsMap::compute3DDistanceToMesh(), mrpt::maps::COccupancyGridMap2D::computeLikelihoodField_II(), mrpt::maps::COccupancyGridMap2D::computeLikelihoodField_Thrun(), mrpt::maps::COccupancyGridMap2D::computeObservationLikelihood_Consensus(), mrpt::maps::COccupancyGridMap2D::computeObservationLikelihood_ConsensusOWA(), mrpt::maps::CHeightGridMap2D_Base::dem_internal_insertObservation(), mrpt::maps::COccupancyGridMap2D::determineMatching2D(), mrpt::maps::CPointsMap::determineMatching2D(), mrpt::maps::CPointsMap::determineMatching3D(), mrpt::maps::CPointCloudFilterByDistance::filter(), mrpt::maps::CPointsMap::fuseWith(), mrpt::graphslam::deciders::CRangeScanOps< GRAPH_T >::getICPEdge(), mrpt::maps::CPointsMap::getPointsBuffer(), mrpt::maps::CPointsMap::insertAnotherMap(), mrpt::maps::COctoMapBase< octree_t, octree_node_t >::internal_build_PointCloud_for_observation(), mrpt::maps::CPointsMap::internal_computeObservationLikelihood(), mrpt::maps::CColouredOctoMap::internal_insertObservation(), mrpt::maps::CPointsMap::internal_insertObservation(), mrpt::maps::CPointsMap::loadFromVelodyneScan(), mrpt::maps::CPointsMap::PLY_export_get_vertex_count(), ransac_data_assoc_run(), run_pc_filter_test(), mrpt::maps::CColouredPointsMap::savePCDFile(), mrpt::utils::PointCloudAdapter< mrpt::maps::CColouredPointsMap >::size(), mrpt::utils::PointCloudAdapter< mrpt::maps::CPointsMap >::size(), mrpt::utils::PointCloudAdapter< mrpt::maps::CSimplePointsMap >::size(), and mrpt::utils::PointCloudAdapter< mrpt::maps::CWeightedPointsMap >::size().
◆ squareDistanceToClosestCorrespondence()
|
virtualinherited |
Returns the square distance from the 2D point (x0,y0) to the closest correspondence in the map.
Reimplemented from mrpt::maps::CMetricMap.
Definition at line 842 of file CPointsMap.cpp.
References ASSERT_, mrpt::math::closestFromPointToLine(), mrpt::math::KDTreeCapable< CPointsMap >::kdTreeClosestPoint2DsqrError(), mrpt::math::KDTreeCapable< CPointsMap >::kdTreeTwoClosestPoint2D(), and mrpt::math::square().
Referenced by mrpt::slam::CICP::ICP_Method_LM().
◆ squareDistanceToClosestCorrespondenceT()
|
inlineinherited |
Definition at line 157 of file maps/CPointsMap.h.
References mrpt::math::TPoint2D::x, and mrpt::math::TPoint2D::y.
◆ writeToMatlab()
|
inlinevirtualinherited |
Introduces a pure virtual method responsible for writing to a mxArray Matlab object, typically a MATLAB struct whose contents are documented in each derived class.
- Returns
- A new
mxArray(caller is responsible of memory freeing) or NULL is class does not support conversion to MATLAB.
Definition at line 79 of file CSerializable.h.
◆ writeToStream()
|
protectedvirtual |
Introduces a pure virtual method responsible for writing to a CStream.
This can not be used directly be users, instead use "stream << object;" for writing it to a stream.
- Parameters
-
out The output binary stream where object must be dumped. getVersion If NULL, the object must be dumped. If not, only the version of the object dump must be returned in this pointer. This enables the versioning of objects dumping and backward compatibility with previously stored data.
- Exceptions
-
std::exception On any error, see CStream::WriteBuffer
- See also
- CStream
Implements mrpt::utils::CSerializable.
Definition at line 121 of file CSimplePointsMap.cpp.
References version, and mrpt::utils::CStream::WriteBufferFixEndianness().
Friends And Related Function Documentation
◆ detail::loadFromRangeImpl
|
friend |
Definition at line 88 of file maps/CSimplePointsMap.h.
◆ detail::pointmap_traits
|
friend |
Definition at line 89 of file maps/CSimplePointsMap.h.
Member Data Documentation
◆ _init_CSimplePointsMap
|
staticprotected |
Definition at line 36 of file maps/CSimplePointsMap.h.
◆ classCMetricMap
|
staticinherited |
Definition at line 57 of file maps/CMetricMap.h.
◆ classCObject
|
staticinherited |
◆ classCPointsMap
|
staticinherited |
Definition at line 65 of file maps/CPointsMap.h.
◆ classCSerializable
|
staticinherited |
Definition at line 42 of file CSerializable.h.
◆ classCSimplePointsMap
|
static |
Definition at line 36 of file maps/CSimplePointsMap.h.
◆ classinfo
|
static |
Definition at line 36 of file maps/CSimplePointsMap.h.
◆ COLOR_3DSCENE_B
|
staticinherited |
Definition at line 663 of file maps/CPointsMap.h.
Referenced by mrpt::maps::CPointsMap::getAs3DObject(), and TEST_F().
◆ COLOR_3DSCENE_G
|
staticinherited |
Definition at line 662 of file maps/CPointsMap.h.
Referenced by mrpt::maps::CPointsMap::getAs3DObject(), and TEST_F().
◆ COLOR_3DSCENE_R
|
staticinherited |
The color [0,1] of points when extracted from getAs3DObject (default=blue)
Definition at line 661 of file maps/CPointsMap.h.
Referenced by mrpt::maps::CPointsMap::getAs3DObject(), and TEST_F().
◆ genericMapParams
|
inherited |
Common params to all maps.
Definition at line 227 of file maps/CMetricMap.h.
Referenced by mrpt::maps::internal::TMetricMapTypesRegistry::factoryMapObjectFromDefinition(), mrpt::maps::CBeaconMap::getAs3DObject(), mrpt::maps::CGasConcentrationGridMap2D::getAs3DObject(), mrpt::maps::CHeightGridMap2D::getAs3DObject(), mrpt::maps::CPointsMap::getAs3DObject(), mrpt::maps::CRandomFieldGridMap2D::getAs3DObject(), mrpt::maps::CReflectivityGridMap2D::getAs3DObject(), mrpt::maps::CLandmarksMap::getAs3DObject(), mrpt::maps::CGasConcentrationGridMap2D::readFromStream(), mrpt::maps::CReflectivityGridMap2D::readFromStream(), mrpt::maps::CGasConcentrationGridMap2D::writeToStream(), and mrpt::maps::CReflectivityGridMap2D::writeToStream().
◆ insertionOptions
|
inherited |
The options used when inserting observations in the map.
Definition at line 186 of file maps/CPointsMap.h.
Referenced by mrpt::maps::COccupancyGridMap2D::computeObservationLikelihood_likelihoodField_Thrun(), internal_build_points_map_from_scan2D(), mrpt::maps::CPointsMap::internal_insertObservation(), mrpt::maps::CPointsMap::loadFromVelodyneScan(), mrpt::hmtslam::CLSLAM_RBPF_2DLASER::prediction_and_update_pfOptimalProposal(), mrpt::maps::CMultiMetricMapPDF::prediction_and_update_pfOptimalProposal(), mrpt::slam::CMetricMapBuilderICP::processObservation(), and run_rnav_test().
◆ kdtree_search_params
|
inherited |
Parameters to tune the ANN searches.
Definition at line 94 of file KDTreeCapable.h.
◆ likelihoodOptions
|
inherited |
Definition at line 208 of file maps/CPointsMap.h.
Referenced by mrpt::maps::CPointsMap::internal_computeObservationLikelihood().
◆ m_bb_max_x
|
protectedinherited |
Definition at line 794 of file maps/CPointsMap.h.
Referenced by mrpt::maps::CPointsMap::boundingBox().
◆ m_bb_max_y
|
protectedinherited |
Definition at line 794 of file maps/CPointsMap.h.
Referenced by mrpt::maps::CPointsMap::boundingBox().
◆ m_bb_max_z
|
protectedinherited |
Definition at line 794 of file maps/CPointsMap.h.
Referenced by mrpt::maps::CPointsMap::boundingBox().
◆ m_bb_min_x
|
mutableprotectedinherited |
Definition at line 794 of file maps/CPointsMap.h.
Referenced by mrpt::maps::CPointsMap::boundingBox().
◆ m_bb_min_y
|
protectedinherited |
Definition at line 794 of file maps/CPointsMap.h.
Referenced by mrpt::maps::CPointsMap::boundingBox().
◆ m_bb_min_z
|
protectedinherited |
Definition at line 794 of file maps/CPointsMap.h.
Referenced by mrpt::maps::CPointsMap::boundingBox().
◆ m_boundingBoxIsUpdated
|
mutableprotectedinherited |
Definition at line 793 of file maps/CPointsMap.h.
Referenced by mrpt::maps::CPointsMap::boundingBox().
◆ m_heightfilter_enabled
|
protectedinherited |
Whether or not (default=not) filter the input points by height.
- See also
- m_heightfilter_z_min, m_heightfilter_z_max
Definition at line 829 of file maps/CPointsMap.h.
◆ m_heightfilter_z_max
|
protectedinherited |
Definition at line 825 of file maps/CPointsMap.h.
◆ m_heightfilter_z_min
|
protectedinherited |
The minimum and maximum height for a certain laser scan to be inserted into this map.
- See also
- m_heightfilter_enabled
Definition at line 825 of file maps/CPointsMap.h.
◆ m_kdtree2d_data
|
mutableprivateinherited |
Definition at line 706 of file KDTreeCapable.h.
◆ m_kdtree3d_data
|
mutableprivateinherited |
Definition at line 707 of file KDTreeCapable.h.
◆ m_kdtree_is_uptodate
|
mutableprivateinherited |
whether the KD tree needs to be rebuilt or not.
Definition at line 709 of file KDTreeCapable.h.
◆ m_kdtreeNd_data
|
mutableprivateinherited |
Definition at line 708 of file KDTreeCapable.h.
◆ m_largestDistanceFromOrigin
|
mutableprotectedinherited |
Auxiliary variables used in "getLargestDistanceFromOrigin".
- See also
- getLargestDistanceFromOrigin
Definition at line 786 of file maps/CPointsMap.h.
Referenced by mrpt::maps::CPointsMap::base_copyFrom(), and mrpt::maps::CPointsMap::getLargestDistanceFromOrigin().
◆ m_largestDistanceFromOriginIsUpdated
|
mutableprotectedinherited |
Auxiliary variables used in "getLargestDistanceFromOrigin".
- See also
- getLargestDistanceFromOrigin
Definition at line 791 of file maps/CPointsMap.h.
Referenced by mrpt::maps::CPointsMap::base_copyFrom(), and mrpt::maps::CPointsMap::getLargestDistanceFromOrigin().
◆ m_ply_export_last_error
|
mutableprivateinherited |
Definition at line 111 of file PLY_import_export.h.
◆ m_ply_import_last_error
|
privateinherited |
Definition at line 61 of file PLY_import_export.h.
◆ m_private_map_register_id
|
static |
ID used to initialize class registration (just ignore it)
Definition at line 118 of file maps/CSimplePointsMap.h.
◆ m_scans_sincos_cache
|
protectedinherited |
Cache of sin/cos values for the latest 2D scan geometries.
Definition at line 781 of file maps/CPointsMap.h.
◆ m_subscribers
|
privateinherited |
Definition at line 42 of file CObservable.h.
◆ x
|
protectedinherited |
Definition at line 779 of file maps/CPointsMap.h.
Referenced by mrpt::maps::CPointsMap::addFrom(), mrpt::maps::CPointsMap::boundingBox(), mrpt::maps::CPointsMap::compute3DDistanceToMesh(), mrpt::maps::CPointsMap::determineMatching2D(), mrpt::maps::CPointsMap::determineMatching3D(), mrpt::maps::CPointsMap::getAllPoints(), mrpt::maps::CPointsMap::internal_computeObservationLikelihood(), and mrpt::maps::CPointsMap::internal_insertObservation().
◆ y
|
protectedinherited |
Definition at line 779 of file maps/CPointsMap.h.
Referenced by mrpt::maps::CPointsMap::addFrom(), mrpt::maps::CPointsMap::boundingBox(), mrpt::maps::CPointsMap::compute3DDistanceToMesh(), mrpt::maps::CPointsMap::determineMatching2D(), mrpt::maps::CPointsMap::determineMatching3D(), mrpt::maps::CPointsMap::getAllPoints(), mrpt::maps::CPointsMap::internal_computeObservationLikelihood(), and mrpt::maps::CPointsMap::internal_insertObservation().
◆ z
|
protectedinherited |
The point coordinates.
Definition at line 779 of file maps/CPointsMap.h.
Referenced by mrpt::maps::CPointsMap::addFrom(), mrpt::maps::CPointsMap::boundingBox(), mrpt::maps::CPointsMap::compute3DDistanceToMesh(), mrpt::maps::CPointsMap::determineMatching2D(), mrpt::maps::CPointsMap::determineMatching3D(), and mrpt::maps::CPointsMap::internal_computeObservationLikelihood().