#include <mrpt/config.h>#include <cmath>#include <string>#include <mrpt/base/link_pragmas.h>#include <mrpt/utils/mrpt_macros.h>#include <mrpt/utils/mrpt_stdint.h>
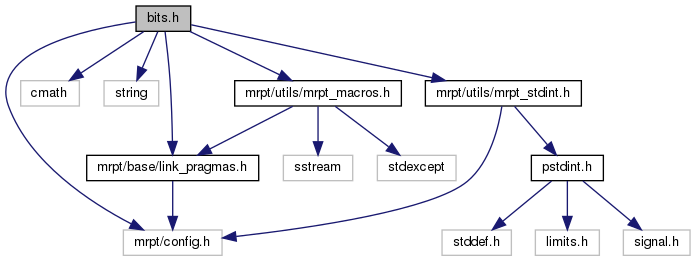
Include dependency graph for bits.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| struct | mrpt::utils::CProfilerProxy |
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::math | |
| This base provides a set of functions for maths stuff. | |
| mrpt::utils | |
| Classes for serialization, sockets, ini-file manipulation, streams, list of properties-values, timewatch, extensions to STL. | |
Macros | |
| #define | _USE_MATH_DEFINES |
| #define | M_PI 3.14159265358979323846 |
| #define | DEG2RAD DEG2RAD |
| #define | RAD2DEG RAD2DEG |
| #define | SELBYTE0(v) (v & 0xff) |
| #define | SELBYTE1(v) ((v>>8) & 0xff) |
| #define | SELBYTE2(v) ((v>>16) & 0xff) |
| #define | SELBYTE3(v) ((v>>24) & 0xff) |
| #define | MAKEWORD16B(__LOBYTE, __HILOBYTE) ((__LOBYTE) | ((__HILOBYTE)<<8)) |
| #define | MAKEWORD32B(__LOWORD16, __HIWORD16) ((__LOWORD16) | ((__HIWORD16)<<16)) |
| #define | MAKEWORD64B(__LOWORD32, __HIWORD32) ((__LOWORD32) | ((__HIWORD32)<<32)) |
Functions | |
| std::string BASE_IMPEXP | mrpt::format (const char *fmt,...) MRPT_printf_format_check(1 |
| A std::string version of C sprintf. More... | |
| bool BASE_IMPEXP | mrpt::math::isNaN (float f) MRPT_NO_THROWS |
| Returns true if the number is NaN. More... | |
| bool BASE_IMPEXP | mrpt::math::isNaN (double f) MRPT_NO_THROWS |
| Returns true if the number is NaN. More... | |
| bool BASE_IMPEXP | mrpt::math::isFinite (float f) MRPT_NO_THROWS |
| Returns true if the number is non infinity. More... | |
| bool BASE_IMPEXP | mrpt::math::isFinite (double f) MRPT_NO_THROWS |
| Returns true if the number is non infinity. More... | |
| template<class MATRIXLIKE > | |
| size_t | mrpt::math::size (const MATRIXLIKE &m, const int dim) |
| template<class T > | |
| T | mrpt::math::square (const T x) |
| Inline function for the square of a number. More... | |
| template<class T > | |
| T | mrpt::math::hypot_fast (const T x, const T y) |
| Faster version of std::hypot(), to use when overflow is not an issue and we prefer fast code. More... | |
| double | mrpt::utils::DEG2RAD (const double x) |
| Degrees to radians. More... | |
| float | mrpt::utils::DEG2RAD (const float x) |
| Degrees to radians. More... | |
| float | mrpt::utils::DEG2RAD (const int x) |
| Degrees to radians. More... | |
| double | mrpt::utils::RAD2DEG (const double x) |
| Radians to degrees. More... | |
| float | mrpt::utils::RAD2DEG (const float x) |
| Radians to degrees. More... | |
| template<typename T > | |
| int | mrpt::utils::sign (T x) |
| Returns the sign of X as "1" or "-1". More... | |
| template<typename T > | |
| int | mrpt::utils::signWithZero (T x) |
| Returns the sign of X as "0", "1" or "-1". More... | |
| template<typename T > | |
| T | mrpt::utils::lowestPositive (const T a, const T b) |
| Returns the lowest, possitive among two numbers. More... | |
| template<typename T > | |
| T | mrpt::utils::abs_diff (const T a, const T b) |
| Efficient and portable evaluation of the absolute difference of two unsigned integer values (but will also work for signed and floating point types) More... | |
| template<typename T > | |
| const T | mrpt::utils::min3 (const T &A, const T &B, const T &C) |
| template<typename T > | |
| const T | mrpt::utils::max3 (const T &A, const T &B, const T &C) |
| template<typename T > | |
| int | mrpt::utils::fix (T x) |
| Rounds toward zero More... | |
| template<class R , class SMART_PTR > | |
| R * | mrpt::utils::getAs (SMART_PTR &o) |
| < Allow square() to be available under mrpt::math and mrpt::utils More... | |
| template<class R , class SMART_PTR > | |
| const R * | mrpt::utils::getAs (const SMART_PTR &o) |
| Utility to get a cast'ed pointer from a smart pointer. More... | |
| void BASE_IMPEXP | mrpt::utils::reverseBytesInPlace (bool &v_in_out) |
| Reverse the order of the bytes of a given type (useful for transforming btw little/big endian) More... | |
| void BASE_IMPEXP | mrpt::utils::reverseBytesInPlace (uint8_t &v_in_out) |
| void BASE_IMPEXP | mrpt::utils::reverseBytesInPlace (int8_t &v_in_out) |
| void BASE_IMPEXP | mrpt::utils::reverseBytesInPlace (uint16_t &v_in_out) |
| void BASE_IMPEXP | mrpt::utils::reverseBytesInPlace (int16_t &v_in_out) |
| void BASE_IMPEXP | mrpt::utils::reverseBytesInPlace (uint32_t &v_in_out) |
| void BASE_IMPEXP | mrpt::utils::reverseBytesInPlace (int32_t &v_in_out) |
| void BASE_IMPEXP | mrpt::utils::reverseBytesInPlace (uint64_t &v_in_out) |
| void BASE_IMPEXP | mrpt::utils::reverseBytesInPlace (int64_t &v_in_out) |
| void BASE_IMPEXP | mrpt::utils::reverseBytesInPlace (float &v_in_out) |
| void BASE_IMPEXP | mrpt::utils::reverseBytesInPlace (double &v_in_out) |
| template<class T > | |
| void | mrpt::utils::reverseBytes (const T &v_in, T &v_out) |
| Reverse the order of the bytes of a given type (useful for transforming btw little/big endian) More... | |
| template<typename T , typename K > | |
| void | mrpt::utils::keep_min (T &var, const K test_val) |
| If the second argument is below the first one, set the first argument to this lower value. More... | |
| template<typename T , typename K > | |
| void | mrpt::utils::keep_max (T &var, const K test_val) |
| If the second argument is above the first one, set the first argument to this higher value. More... | |
| template<typename T > | |
| void | mrpt::utils::saturate (T &var, const T sat_min, const T sat_max) |
| Saturate the value of var (the variable gets modified) so it does not get out of [min,max]. More... | |
| template<typename T > | |
| T | mrpt::utils::saturate_val (const T &value, const T sat_min, const T sat_max) |
| Like saturate() but it returns the value instead of modifying the variable. More... | |
| template<class T > | |
| void | mrpt::utils::delete_safe (T *&ptr) |
| Calls "delete" to free an object only if the pointer is not NULL, then set the pointer to NULL. More... | |
| template<class VECTOR_T > | |
| void | mrpt::utils::vector_strong_clear (VECTOR_T &v) |
| Like calling a std::vector<>'s clear() method, but really forcing deallocating the memory. More... | |
| template<typename T > | |
| T | mrpt::utils::length2length4N (T len) |
| Returns the smaller number >=len such that it's a multiple of 4. More... | |
Auxiliary stuff for the global profiler used in MRPT_START / MRPT_END macros. | |
| void BASE_IMPEXP | mrpt::utils::global_profiler_enter (const char *func_name) MRPT_NO_THROWS |
| void BASE_IMPEXP | mrpt::utils::global_profiler_leave (const char *func_name) MRPT_NO_THROWS |
Macro Definition Documentation
◆ _USE_MATH_DEFINES
◆ DEG2RAD
◆ M_PI
◆ MAKEWORD16B
| #define MAKEWORD16B | ( | __LOBYTE, | |
| __HILOBYTE | |||
| ) | ((__LOBYTE) | ((__HILOBYTE)<<8)) |
◆ MAKEWORD32B
| #define MAKEWORD32B | ( | __LOWORD16, | |
| __HIWORD16 | |||
| ) | ((__LOWORD16) | ((__HIWORD16)<<16)) |
◆ MAKEWORD64B
| #define MAKEWORD64B | ( | __LOWORD32, | |
| __HIWORD32 | |||
| ) | ((__LOWORD32) | ((__HIWORD32)<<32)) |