Detailed Description
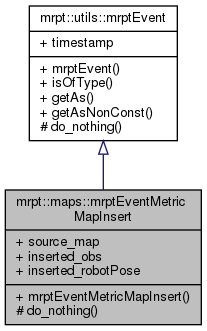
Event emitted by a metric up upon a succesful call to insertObservation()
- See also
- CMetricMap
Definition at line 40 of file maps/CMetricMapEvents.h.
#include <mrpt/maps/CMetricMapEvents.h>
Public Member Functions | |
| mrptEventMetricMapInsert (const mrpt::maps::CMetricMap *smap, const mrpt::obs::CObservation *obs, const mrpt::poses::CPose3D *robotPose) | |
| template<class EVENTTYPE > | |
| bool | isOfType () const |
| template<class EVENTTYPE > | |
| const EVENTTYPE * | getAs () const |
| template<class EVENTTYPE > | |
| EVENTTYPE * | getAsNonConst () const |
Public Attributes | |
| const mrpt::maps::CMetricMap * | source_map |
| const mrpt::obs::CObservation * | inserted_obs |
| const mrpt::poses::CPose3D * | inserted_robotPose |
| mrpt::system::TTimeStamp | timestamp |
Protected Member Functions | |
| virtual void | do_nothing () MRPT_OVERRIDE |
| Just to allow this class to be polymorphic. More... | |
Constructor & Destructor Documentation
◆ mrptEventMetricMapInsert()
|
inline |
Definition at line 45 of file maps/CMetricMapEvents.h.
Member Function Documentation
◆ do_nothing()
|
inlineprotectedvirtual |
Just to allow this class to be polymorphic.
Reimplemented from mrpt::utils::mrptEvent.
Definition at line 43 of file maps/CMetricMapEvents.h.
◆ getAs()
|
inlineinherited |
Definition at line 46 of file mrptEvent.h.
◆ getAsNonConst()
|
inlineinherited |
Definition at line 49 of file mrptEvent.h.
◆ isOfType()
|
inlineinherited |
Definition at line 43 of file mrptEvent.h.
Referenced by mrpt::graphslam::CWindowObserver::OnEvent(), and mrpt::slam::COccupancyGridMapFeatureExtractor::OnEvent().
Member Data Documentation
◆ inserted_obs
| const mrpt::obs::CObservation* mrpt::maps::mrptEventMetricMapInsert::inserted_obs |
Definition at line 48 of file maps/CMetricMapEvents.h.
◆ inserted_robotPose
| const mrpt::poses::CPose3D* mrpt::maps::mrptEventMetricMapInsert::inserted_robotPose |
Definition at line 49 of file maps/CMetricMapEvents.h.
◆ source_map
| const mrpt::maps::CMetricMap* mrpt::maps::mrptEventMetricMapInsert::source_map |
Definition at line 47 of file maps/CMetricMapEvents.h.
◆ timestamp
|
inherited |
Definition at line 51 of file mrptEvent.h.